SCI论文(www.lunwensci.com):
摘要:目前高职院校中的专业课程很多都采用了项目教学的模式,但这些项目规模都比较小,知识面窄,项目内容不够新颖,知识点未能跟上技术的发展。设计了一套机器人系统,采用四连杆设计机械手指,解决了传统手指抓力小、不灵活的问题;采用旋铆轴设计,解决了传统螺钉连接造成机械臂抖动的问题;在控制子系统中,通过调整轴的旋转角度参数来避免机械臂的抖动。并且利用该机器人系统进行项目教学研究,项目包括了机器人设计、机器人零件制作和机器人教学。结果表明,在设计机器人的过程中,加强学生对机器人结构和动作原理的认识,加深对机械设计和控制理论的基础知识理解;在制作机器人结构零件过程中,巩固了学生的数控加工理论知识,增强学生的动手能力意识。
关键词:机器人;机械手;Arduino;项目教学
Design of Robot System Based on Project Teaching
Xie Dongjiang,Liu Shishi,Zhong Ronglin,Qin Hao
(Huizhou Engineering Vocational College,Huizhou,Guangdong 516023,China)
Abstract:At present,many professional courses in higher vocational colleges adopt the project teaching mode,but the scale of these projects is relatively small,the scope of knowledge is narrow,the project content is not novel enough,and the knowledge points fail to keep up with the development of technology.A robot system was designed,which used four connecting rods to design mechanical fingers,which solved the problem of small grasping force and inflexibility of traditional fingers.The design of rotary riveting shaft solved the problem of mechanical arm shaking caused by traditional screw connection.In the control subsystem,the shaking of the manipulator was avoided by adjusting the rotation angle parameters of the shaft.The project includes robot design,robot parts manufacturing and robot teaching.The results show that in the process of designing robot,students should strengthen their understanding of robot structure and action principle,and deepen their understanding of basic knowledge of mechanical design and control theory.In the process of making robot structural parts,students'theoretical knowledge of NC machining is consolidated and students'practical ability consciousness is enhanced.
Key words:robot;manipulator;Arduino;project teaching
0引言
以培养学生创新精神与创新能力为价值导向,培养适应创新型国家建设需要的高水平创新人才,是我国高等教育的一项重要使命,也是当前高等学校教育教学改革的重要内容之一[1]。机器人教育作为一门具有较强实践性质的课程,融合了机械、计算机、电子信息、控制工程、人工智能等众多学科的理论与实践,创新教育效果明显[2]。项目化教学模式突破了单一的课堂教学模式,具有真实性、实践性、跨学科性、合作性、创新性、开放性等特点[3]。目前很多高职院校都有了机器人实训中心,并且利用实训中心开设了以机器人为中心的项目教学课程,学生可以对机器人进行编程,完成码垛、轨迹、压铸等项目。但是,这些项目都是停留在机器人应用的层面,只是解决了学生操作机器人的问题。本文通过设计并制作了一套机器人系统,并在机械结构设计、机器人零件加工、装配、机器人调试过程中进行项目教学,让学生真正了解机器人的机械结构、系统组成及运动控制原理;掌握机器人关键零部件如机械手指的设计、机械零件数控加工及装配;通过齿轮传动设计、机械零件的公差配合设计以及软件编程解决机器人系统中的机械臂抖动问题;通过在项目教学实施过程中体验机器人在实际生产的用途以及在实际生产中如何使用机器人。
1机器人系统
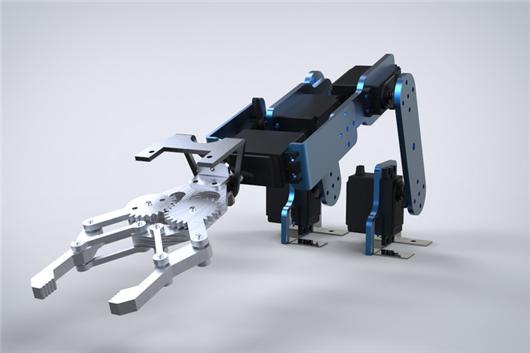
机器人系统包括机械结构子系统和控制子系统两部分,在机械结构子系统中,包括了给系统提供动力源的驱动模块和执行动作的机械机构模块;在控制子系统中,包括了电子电路硬件模块和可编程环境的软件模块。系统结构如图1所示。
1.1机械机构子系统
驱动模块为舵机,机械机构模块包括手指、手腕、小臂、大臂1、大臂2、基盘、底板。该机器人有6个舵机,分别控制大臂、小臂、手腕和手指等,可以单个舵机运动,也可以多个舵机同时运动,通过软件程序调节舵机运动的速度和方向实现用机械手指抓取、转移和搬运物体的功能。机器人在空间有6个自由度的活动范围,能最大限度模拟实际生产过程中的动作。机器人结构如图2所示。
1.1.1机械手指设计
机械手指采用平面四连杆结构设计,原理如图3所示。AB为固定结构,AD、BC、CE三根连杆可自由活动,点D在CE杆上。当BC杆绕点B顺时针方向运动时,四连杆的C、D、E点分别移动至C1、D1、E1,其中E1相对点E位置水平向左方向移动了。反之,如果BC杆做逆时针方向运动,点E将水平向右移动。
利用以上原理,设计了机械手指如图4所示,主动轮M顺时针旋转时,左侧手指将向外移动,同时带动从动轮逆时针旋转,右侧手指同步向外移动,手指组合呈松开状态。反之,主动轮逆时针旋转时,手指组合呈夹紧状态。
连杆材料采用铝合金6061,既可以减轻手指的重量,又可以保证手指的强度。
1.1.2防抖动设计
旋转轴采用铆接的方式连接,轴采用旋铆方式固定在零件上,相对于螺杆、螺母连接既提高了结构的强度,也能保证零件装配后的误差范围小,从而实现防抖动的目的。具体设计如图5所示。
(1)轴的尾部采用燕尾设计,燕尾角度为120°,既保证铆接机对接的精度,又可以保证轴的尾部材料向四周扩散。
(2)轴尾部的高度大于基材的厚度,最好高出0.2 mm以上,预留轴尾部的材料通过高温与基板融合,保证铆接的强度。
(3)轴孔的配合尺寸中,孔的设计尺寸为小2.4轴的尺寸设计为小2.40-0.02。
1.2控制子系统
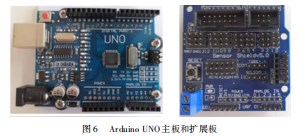
机器人系统的硬件模块采用了Arduino UNO主板和扩展板,如图6所示。Arduino UNO是一款基于AT‐mega328P的微控制器板。它有14个数字输入/输出引脚(其中6个可用作PWM输出),6个模拟输入,16 MHz晶振时钟,USB接口,电源插孔,ICSP接头和复位按钮。只需要通过USB数据线连接电脑就能供电、程序下载和数据通讯。
Arduino UNO是一个开源的硬件模块,它可以和各种传感器组合设计实现不同的功能,如通过红外传感器实现测量距离;通过接触传感器实现检测障碍物;通过灰度传感器实现循迹等[4]。可以利用扩展板来加载上述的传感器进行组合项目实验。Arduino UNO也提供了一个开源的软件开发环境,包括图形化编程和IDE编程,本文采用了后者的开发环境。
1.3机械手防抖动软件控制
机器人有6个舵机,分别控制对应机械臂的旋转方向和角度,在程序中,通过改变舵机的角度来控制舵机的运动速度,对于某一舵机,程序中相邻两步改变的角度值越大,舵机的运动速度就越快,反之,舵机的运动速度越慢。在实际过程中,发现由于小臂长度尺寸较大,运动过程中容易出现晃动,通过减小轴3的角度变化值,由原来的10°变更为现在的5°,即在程序中myservo3由初始值的105°变为运动时的100°,大大改善了晃动的问题。
2机器人系统的项目教学
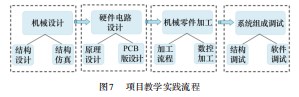
本文的机器人系统项目,包括了机械设计、机械制造、控制理论、人工智能等方面的知识,涉及多学科知识的应用,可以系统地、全面地让学生去学习,有基础理论知识,也有控制实操环节,具体流程如图7所示。
2.1项目一——机器人机械结构设计和运动仿真设计
学生利用SolidWorks软件进行零件设计,在进行零件结构设计的过程中,了解并掌握机械设计的基础,如进行齿轮设计时,需要了解并掌握齿轮的基本知识,如齿顶圆、齿根圆和分度圆的概念和计算公式。在零件结构设计的过程中,让学生熟练使用设计软件,了解软件的基本功能和使用技巧。
在SolidWorks中设计齿轮的步骤如下,首先计算齿轮齿顶圆直径,然后用单个的齿形阵列切割齿顶圆。该单个齿形设计如图8所示。图中,P为节距,p=πm(m齿轮模数);ha为齿顶高,ha=m;h为齿高,h=2.25 m。
在机械手指的设计中,需要保证左右两个手指同步加紧和放松,设计中可以利用齿轮的配合指令,使主动轮和从动轮同步运动模拟手指的动作,如图4所示。
2.2项目二——机器人机械零件结构2D设计
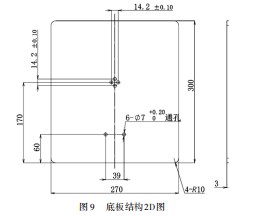
在进行零件的2D图纸设计时,可以让学生了解并掌握零件出图的方法和步骤。如图纸的布局,尺寸的标注,公差选择,以及根据零件规格输出BOM清单。在标注尺寸的过程中,掌握零件的装配基准和设计基准,以及尺寸链的计算,在图纸的标题栏中,需要选用合适的材料、规格和标识每个零件的用量,机器人底板的2D图纸如图9所示。
2.3项目三——机器人结构零件加工
项目中,学生对底座、大臂、手腕、手腕等结构零件的进行数控加工,利用数控车床、数控铣床和钻床等设备加工出零件的结构,培养学生的工程实践能力和动手能力,在实践中使学生了解机械设计和零件加工之间的关系。以机器人底板为例,首先确定零件的加工流程如图10所示,然后利用UG软件编写CNC程序。
M30
%
2.4项目四——机器人示教
(1)示教单轴运动
分别改变以下6个轴(myservo0~myservo5)的角度数值,机器人的每个轴将根据调整的参数进行运动。
(2)示教抓取、搬运小球
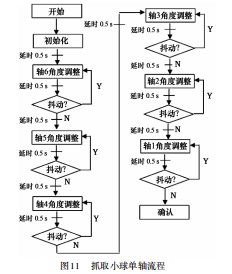
在程序中,通过改变单轴或同时改变多个轴的角度参数,实现机器人抓取和搬运小球的动作。其中通过改变单轴的流程如图11所示。
通过机器人编程,可以实现对各种形状的物体进行抓取和搬运,并且模拟工业机器人的码垛等动作,在实践过程中,使学生了解机器人的工作原理及编程技巧,激发学生对机器人课程的兴趣,提高学生的动手操作能力。
2.5项目五——机器人系统功能扩展
该机器人控制系统采用的Arduino是一款便捷灵活、适用的开源电子原型平台,平台的硬件和软件都是开放。平台可以适配各种传感器如温度、转速、红外、超声波等,学生可以根据自己的兴趣扩展各种传感模块,实现距离测试、颜色识别和温度感应。
3机器人系统教学应用
本文的机器人系统教学项目,已在学校的机电工程系得到应用,机械设计及自动化专业学生完成机械零件设计和仿真项目,数控专业学生完成机械零件加工项目,机器人专业学生完成机器人调试和示教等项目,该系统在实际教学中取得良好的效果。
4结束语
本文设计了机器人系统,采用四连杆结构设计了机器人手指,通过齿轮传动仿真了机器人手指的运动,设计了铆接轴取代螺钉用于机械零件的连接固定,然后利用CNC加工机械零件,进行组合装配一套机器人系统,在Arduino的IDE开发环境中进行软件编程。通过设计和制作该机器人系统,在每个环节中实施项目教学,学生通过设计机器人系统,掌握了机械设计、控制理论、数控加工及机器人专业基础知识,通过制作机器人结构零件,增强了动手实践能力,通过示教机器人系统,提升了解决实际问题的综合能力。
参考文献
[1]武毅英,杨冬.近20年中国高校创新创业教育研究的知识图谱[J].现代大学教育,2019(4):53-63.
[2]江巨浪.应用Arduino平台进行公选课机器人教育教学设[J].安庆师范大学学报,2020(8):113-115.
[3]周雯超,黄家才.机器人工程专业项目化教学模式探索与实践[J].中国现代教育装备,2021(9):148-149.
[4]江巨浪,刘国明.应用Arduino平台进行公选课"机器人教育"教学设计[J].安庆师范大学学报,2020(8):113-115.
[5]肖振兴.舵机构成的六自由度示教型机械手臂设计[J].自动化仪表,2021(6):68-70.
[6]罗琦."双一流"背景下高职教师国际化发展研究[J].现代职业教育职业培训,2018(4):46-47.
[7]马少华.智能物料搬运机器人教学实验平台设计与开发[J].实验技术与管理,2021(3):120-125.
[8]严铖,陈义华,陈建辉.基于工业机器人技术应用的项目式教学设备探究[J].机器人,2019(8):120-122.
[9]马天力,蒋大成,陈超波.机器人专业项目式教学模式探究[J].创新创业理论研究与实践,2021(5):106-108.
[10]于明,刘波.图解法求解平面四杆机构教学探究[J].镇江高专学报,2021(10):118-121.
[11]王思远.一种基于连杆机构的仿生四足爬壁机器人设计[J].科技创新与应用,2021(19):9-15.
[12]曹越,陈怡璇,凌翰.桌面式教学机器人[J].智能应用,2019(7):34-36.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45853.html