SCI论文(www.lunwensci.com)
摘要 :目前,我国在苹果、梨、桃等水果生产方面已逐渐形 成区域化生产格局 ;市场上 存在的适合苹果、桃、梨等水果采 摘的机械较为简单 , 无法适应摘取水果复杂多变的摘取条件 ;人 工采摘工作量大 , 效率低 , 且极易造成果实损伤 , 甚至发生采摘 人员跌落地面 , 而发生人身事故。除此之外,传统人工采摘还存 在单果成熟期不一致,水果远距离由人眼辨识,存在采摘 水果 效果较差的问题。
为了解决这些问题,我们设计了智能伸缩式水果采摘机械 手,是集水果识别和半自动抓 取为一体的小型辅助人工采摘机 械装置,既实现了对水果的半自动抓取,水果成熟度的检测,又 保证了提高水果采摘效率、降低劳动强度和采摘成本, 保障水果 成品质量。
水果采摘机械由 STM32 为核心的智能识别控制装置控制, 利用各种感应装置实现水果成熟度的检测, 以及距离检测、夹持 力大小检测,反馈 stm32 单片机,如果水果符合要求,水果采摘 曲面爪牢牢的抓取水果,利用推杆电机和伸缩机构实现拉力的 传递,将水果取下,利用回收装置快速将采摘下的水果进行回 收,能有效提高采摘效率。
1 研究背景及意义
我国是一个水果生产大国 ,从 1993 年开始 , 我国水果产量和 栽培面积均超过印度、巴西和 美国 , 位居世界第 1 位。2008 年 , 我国果树种植面积占世界果树种植总面积的 1/5.全国水果 总 产量万吨 , 占世界水果总产量的 1/7. 居世界第一。水果产业是 我国农业产业体系中一个重 要的组成部分 , 苹果、梨、桃在其 中占有极其重要的地位。以苹果为例,苹果为我国第一大水 果 品种,我国苹果面积和产量分别占世界的 40%和 33%,均居世 界首位。近年来,我国苹果汁发展迅速,已成为世界第一大出口 国,出口额占世界的 1/4.我国拥有世界上最大最好的 苹果适 宜产区。苹果生产近年来发展迅猛。目前,我国水果面积 1320 万公顷,产量 12660.82 万吨, 其中苹果面积222.15 万公顷,产量 3849.1 万吨,位居水果产量的首位。 目前,我国在苹果、梨、桃 等水果生产方面已逐渐形成区域化生产格局 , 但采摘机械化装 备的应用与种植面积不相适应 , 市场上存在的适合苹果、桃、梨 等水果采摘的机械较为简单 , 能在一定程度上降低人的工作强度,但无法适应摘取水果复杂多变的摘取条件,采摘机械多 为 手拉式,导致仍以人工上树采摘作业为主 , 采摘所需劳动力占整 个生产过程劳动力的30% 到 50%,采摘过程已成为制约苹果、桃、 梨种植产业发展的瓶颈。由于苹果、梨、桃采摘季节性 强 , 人工 采摘工作量大 , 效率低 , 且极易造成果实损伤 , 甚至发生采摘人 员跌落地面 , 而发生人 身事故。除此之外,单果成熟期不一致, 水果由人眼辨识,采摘水果效果较差。因此 , 实现采 摘机械化作 业有着重要意义。伸缩式水果采摘机械手集水果识别和半自动 抓取为一体的小型辅助人工采摘机械装置,即实现了对水果的 半自动抓取, 水果成熟度的检测, 提高水果采 摘效率、降低劳动 强度和采摘成本, 又保证了保障水果成品质量。
2 国内外研究现状
水果采摘机械是一种能够自动化地采摘水果的设备,其研 究涉及到机械工程、电子工程、计算机科学等多个领域。目前, 国内外对水果采摘机械的研究已经取得了一定的进展。
国内方面,随着农业现代化的推进,水果采摘机械逐渐走向 智能化和高效化。近年来,国内多家企业和高校开始研发水果 采摘机械,并取得了一些成果。具体的代表有 :1. 柿子采摘机 : 该机器是由中国农业科学院柿子研究所于 1995 年研制成功的。 它能够自动识别柿子的成熟度,自动采摘,每小时可采摘2000- 3000 个柿子。2. 葡萄采摘机 :该机器是由浙江大学于2001 年研 制成功的。它能够自动识别葡萄的成熟度和位置,自动采摘,并 且可以根据不同品种的葡萄进行调整。3. 樱桃采摘机 :该机器 是由山东农业大学于2010 年研制成功的。它能够自动识别樱桃 的成熟度和位置, 自动采摘, 并且可以根据不同品种的樱桃进行 调整。这些水果采摘机械在国内都取得了良好的应用效果, 为提 高水果采摘效率、降低人力成本做出了贡献。
国外方面,欧美等发达国家在水果采摘机械方面处于领先 地位。他们主要关注如何提高水果采摘的效率和质量, 并且推广 使用新型材料和技术。具体的一些代表有 :1. 苹果采摘机 :该 机器是由美国华盛顿州立大学于2005 年研制成功的。它能够自 动识别苹果的成熟度和位置,自动采摘,并且可以根据不同品 种的苹果进行调整。2. 橙子采摘机 :该机器是由西班牙瓦伦西 亚理工大学于2010 年研制成功的。它能够自动识别橙子的成熟 度和位置,自动采摘,并且可以根据不同品种的橙子进行调整。
3. 葡萄柚采摘机 :该机器是由以色列海法理工大学于2017 年研制成功的。它能够自动识别葡萄柚的成熟度和位置,自动采摘, 并且可以根据不同品种的葡萄柚进行调整。
随着果园机械技术的进一步融合,我国近些年也陆续研制 出了很多新型的采摘器,如2007 年研制出了第 一台多功能果园 作业机即 LG—l 型多功能果园作业机,2009 年研制出了适宜单 人操作使用的 枸杞采摘机和 2010 年研制出了 4YS-24 型红枣收 获机等。而我国南方水果种植园大部分处于丘陵山仄地带, 受限 于坡地地形,合适的采摘机械很少,基本还是靠人工采摘。在国 内,水 果采摘机器人的研究刚刚起步,东北林业大学、上海交 通大学、江苏大学、浙江大学、南京 农业大学、中国农业大学、 华南农业大学等单位从机械手、末端执行器、行走装置等不同方 面积极介入采摘机器人的研究和研制。通过跟踪国外先进技术, 在机器人采摘领域内取得了 初步的成果。但是目前都处于实验 阶段,投入农业生产实际仍需时日。本产品利用机械手对水果 进行采摘,取代了人工采摘水果。水果采摘机械由 STM32 为核 心的智能识别控制装置控制,多种传感器对水果进行智能识别 后,通过水果抓取装置摘取水果。整套设备避免了机器盲目采摘 未成熟的水果, 将机械化系统与智能识别结合, 实现了对水果的 半自动抓取, 水果成熟度的检测, 在一定程度上提高水果采摘效 率、降低劳动强度 和采摘成本, 又保证了保障水果成品质量。
3 设计方案
智能伸缩式水果采摘机械手主要用于采摘苹果、梨、桃等水果,共由六部分组成 :能源、伸缩装置、水果抓取装置、智能识 别控制装置、回收装置、辅助装置。我们先设计取伸缩式 水果 采摘机械手的硬件, 设计一种有利于水果抓取的装置, 然后利用 现有技术进行智能化处 理,通过编程实现智能抓取水果的目的。 最后, 对该设计进行大量的试验, 及时发现存在的 缺陷, 并进行 进一步的优化。
4 设计实现过程
该作品最大的特点就是能够实现水果的半自动抓取以及水 果成熟度的检测, 因此相关功能的实现非常重要, 功能如下 :
(1) 能源装置为大功率 12V 锂电池,可实现充电及放电功 能,为整个系统提供一次工作时间内充足的电量。将其放在水果 车上, 合理的减少空间的占用。
(2) 伸缩装置由推杆电机和伸缩机构组成。推杆电机给其他装置向下的力,实现水果的顺利摘下 ;推杆电机采用优质铝合金 为材料,机构设计精密,重量轻,采用直流电机粉末冶金齿轮减 速,内置限位开关设计,不仅实现行程走完自动停止功能,还节 能环保耐用。选用的推杆电机最大退力为 1300N,速度 7mm/s, 经试验符合将水果顺利摘下的要求。推杆电机用拉绳与伸缩机构 相连,将推杆电机的拉力传递给伸缩机构,实现伸缩功能。如下 图所示,伸缩机构由活塞,弹簧,伸缩外壳组成。当推杆电机的 推杆下降,迁引拉绳,拉绳 拉拽活塞,活塞下降,水果抓取装置 向下移动,实现水果的摘取。水果摘取完成并收集后,推杆电机 的推杆上升, 被压缩的弹簧给活塞向上的力, 活塞恢复原始高度。
(3) 水果抓取装置由舵机及舵机座、半齿轮臂、曲面支架、 水果抓取曲面爪组成。两半齿轮臂通过半齿轮啮合, 啮合角度为 180 度。水果抓取曲面爪根据大多数水果外型模拟而成,上面覆 盖有缓冲橡胶, 能很好的夹持水果和保护水果。
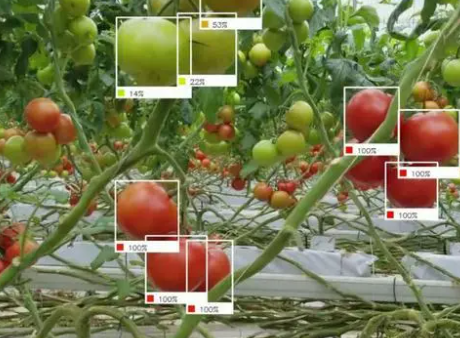
(4) 智能识别控制装置由单片微型计算机MCU、传感器、通 信模块和电机构成。单片机的型号为 STM32F103RCT6. 用到的 传感器为超声波测距传感、色彩识别传感器和压力传感器,分 别对水果与机械手底部的距离、水果的色彩和机械手对水果的 加持力度进行检测,NRF24L01 通信模块实现上下两个部分的 stm32 芯片的通信。顶部单片机对检测到的数据进行处理,来判 断是否满足夹持条件, 是否满足加持力度, 是否满足拉拽信号发 送条件, 进而控制机械手舵机的转动角度, 通过 NRF24L01 模块 向底部芯片发送拉拽信号。底部芯片接收到拉拽信号后, 控制推杆电机的收缩来完成对苹果的拉拽。
(5) 回收装置包括推手和回收网,推手由舵机与小推手组成,当苹果从树上摘下后,机械手缓慢松开,并保持一定的加持 力,舵机由 stm32 芯片控制,舵机盘开始旋转,带动小推手推苹 果,苹果顺着曲面滚动,最终将苹果推入回收网内,回收网为弹 性材料,苹果在下降过程中受其弹力影响,匀速下降,回收网末 端为缓冲棉, 防止苹果表面损伤, 最终苹果进入水果车。
(6) 辅助装置包括水果采集车、几个杆件、以及连接件,辅 助其他装置更好的完成工作。水果采集车负责收集采摘水果, 连 接件负责连接各装置过渡部分, 保证强度与刚性。
5 工作原理及性能
5.1 工作原理图
5.2 作品使用
下面对智能伸缩式水果采摘机械手的使用过程进行说明 :
(1) 使用前,将蓄电池充满电,检查设备装配情况,无误后 方可使用 ;
(2) 采果人需将水果车推向合适位置,一只手握手柄,另一只手握杆, 找到苹果后将机械手伸向苹果, 智能伸缩式水果采摘 机械手将会自动识别抓取苹果,成熟的苹果将会被采摘入水果 车内 ;
(3) 将水果车内的苹果摆好, 防止苹果连续碰撞。 5.3 作品性能
(4) 水果采摘机械手每分钟可采摘 5~8 个水果 ;
(5) 水果采摘机械手可连续工作2~3 个小时。
5.4 技术关键
(1) 色感模块如何进行水果成熟的识别 ;
(2) 机械手结构能够牢牢地抓紧苹果 ;
(3) 回收装置的缓冲设备能够保护水果并能够使水果流入 水果车。
8 应用前景随着人工成本的不断提高,自动化水果采摘机械的应用前 景越来越广阔。自动化水果采摘机械可以大大提高水果采摘效 率,减少人力成本, 并且能够保证水果的品质和安全。
首先,自动化水果采摘机械可以大幅度提高水果采摘效 率。传统的水果采摘方式需要大量劳动力参与,而且采摘速度 较慢。而自动化水果采摘机械可以通过精确的定位和识别技 术,快速地完成水果的采摘工作。这不仅可以节约时间,还可 以增加产量。
其次,自动化水果采摘机械能够降低人力成本。在传统的水 果采摘方式中, 需要雇佣大量的农民进行手工采摘。而这些农民 的工资成本是非常高昂的。而自动化水果采摘机械只需要一些 技术维护人员进行维护和修理即可, 并且其使用寿命也比较长。
再次,自动化水果采摘机械能够保证水果品质和安全。在传 统的水果采摘方式中, 由于采摘者的技术和经验不同, 采摘出来 的水果品质参差不齐。而自动化水果采摘机械能够通过精确的 定位和识别技术,选择最优质的水果进行采摘。同时,自动化水 果采摘机械还能够避免人为因素对水果造成的污染,保证了水 果的安全。
最后,自动化水果采摘机械在未来还有很大的应用前景。 随着科技的不断进步和发展, 自动化水果采摘机械也将越来越 智能化、高效化和多功能化。例如,未来可能会开发出更加精 准、快速、可靠的定位和识别技术 ;也可能会开发出适用于不 同品种、不同形态、不同成熟度等多种情况下的自动化水果采 摘机械。
总之,自动化水果采摘机械是一种非常有前景的技术应用。 它可以大幅度提高水果采摘效率、降低人力成本, 并且保证了水 果品质和安全。在未来,随着科技的不断进步和应用,自动化水 果采摘机械的应用前景也将越来越广阔。
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61939.html