SCI论文(www.lunwensci.com)
摘要:为探讨 PLC 系统应用下的多轴机械手运动控制设计, 首先通过文献检索收集并理论分析 PLC 系统应用下的多轴机械手运动 控制作业情况以及设计知识。然后从 PLC多轴机械控制以及工艺研究两个方面入手, 建立完整的多轴机械手运动控制体系, 提出 了多轴机械手运动控制系统运行设计方面的四种安全指标。采用仿真试验法建立了真实的数学模型, 通过多轴机械手运动控制系 统中的电气数据获取、系统程序运行、周期方面的 3 种变化规律, 实现对控制设计的研究和探讨。研究结果表明: 机械手的运动 受信号的控制, 在多轴机械手运动控制设计阶段应加强对 PLC 的思考, 机械手在制造过程中应重视其柔性, 结合柔性制造单元更 改机械制造系统的人工操作方式, 可以让机械手向微型化、小型化的方向发展。
Research on Motion Control Design of Multi-axis Manipulator Based on PLC
Han Zhilong, Shi Xiao
(Tianjin Wujia Lianchuang Technology Development Co., Ltd., Tianjin 300451. China)
Abstract: In order to discuss the motion control design of multi axis manipulator under PLC system, the operation and design knowledge of motion control of multi axis manipulator under PLC system are collected and analyzed theoretically through document consulting . Then, starting from two aspects: PLC multi axis mechanical control and process research, a complete multi axis manipulator motion control system is established, and four safety indicators for the operation design of the multi axis manipulator motion control system are proposed . A real mathematical model is established using simulation testing method . Research and exploration of control design are achieved by electrical data acquisition, system program operation, and cycle changes in the multi axis robotic arm motion control system . The results indicate that the manipulator is controlled by signals. In the design stage of multi axis robotic arm movement control, the consideration of PLC should be strengthened. The flexibility of the robotic arm should be emphasized in the manufacturing process . Flexible manufacturing units should be adopted to change the manual operation mode of the mechanical manufacturing system, thus pushing the robotic arm development towards miniaturization and miniaturization.
Key words: PLC; multi-axis manipulator; motion control design
0 引言
随着时代的不断发展, 工业行业相关操作的不断进 步, 各部门对机械手控制方面的研究工作更加深入。在 此过程中, PLC 编程逻辑控制器的利用, 可控制在设计 环节数字运算操作电子系统, 利用可编程存储器, 使多 轴机械手执行远程逻辑运算, 控制运算顺序, 定时地进 行算术运算, 向多轴机械手发出指令, 通过模拟式、数 字式的数据信息输入输出方式, 实现对轴机械手的控 制[1]。因此, 为确保在工业现场中机械手控制工作的顺 利开展, 应分析与掌握 PLC 的多轴机械手运动控制设计 方案, 明确其特性。研究方法: 国内外 PLC 的多轴机械 手运动控制设计做了大量研究。文献[1-2]虽然阐述了机 械手动作的运行方式, 但是没有涉及到 iFIX 组态软件方 面的内容, 在多轴机械手运动控制设计存在-定问题。
本文立足于文献内容, 针对 iFIX 组态软件方面的内 容进行了深入分析, 希望能够完善关于 PLC 系统应用中 多轴机械手运动控制设计研究, 为设计工作的不断发展 提供助力。研究预期结果: 理清 PLC 应用下多轴机械手 的设计思路、方法, 为设计工作提供参考。
1 基于 PLC 的多轴机械手运动控制系统的分析
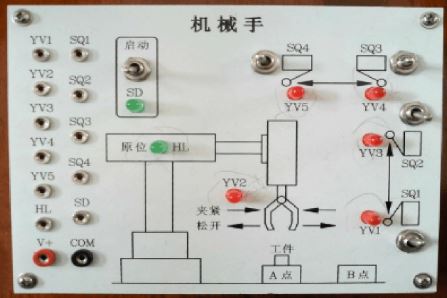
1.1 多轴机械手运动控制的控制方式多轴机械手的运动控制示意图如图 1 所示, 为一个垂 直/水平运动的机械设备, 由初始点A将工件运输到B点处。 全部动作皆可通过“气缸”进行驱动,由对应的电磁阀进 行控制,采用 PLC 控制,调整双线圈位置,实现对电磁阀 的控制[2], 完成多轴机械手的上升、下降以及左右移动。
通过对上升、下降电磁阀的通断电, 实现机械手的 上升与下降。与之相同, 对相应电磁阀的控制实现左右移动。对单线圈电磁阀的通断电控制来实现机械手的放 松/夹紧, 线圈通电则机械手夹紧, 断电则会放松[3]。
为保证设备的安全, 应在机械手移动前核实工作台 的空闲状态, 确保机械手的活动空间。首先检测光电开 关, 保证信号可以输入到 PLC 的 10.5 端口。同时确认机 械手位于原点后开始: ( 1) 启动设备, 使机械手下降到 指定位置; ( 2) 按下限位开关, 断开电磁阀, 停止设备 运行; ( 3) 在确认夹紧物件后, 接通相应电磁阀, 上升 机械手, 达到上限位开关位置, 停止上升; ( 4) 确保工 作台无工件后接通左移/右移电磁阀, 机械手向右移动, 同时接通光电开关, 避免机械手自行下降; ( 5) 放松物件后, 可让电磁阀通电, 使机械手上升, 在碰到限位开 关后电磁阀断电, 则可完成一周期的操作。
1.2 多轴机械手运动控制的工艺及要求
根据多轴机械手的工作方式选择开关, 运用自动/手 动的方式, 操作按钮, 确保控制盘面板合理布置, 在面 板上设置紧急停车按钮、电源供给按钮、机械手原点指 示灯以及电源指示灯, 使机械手能够运用手动操作以及 自动操作的方式进行运行。例如: 在多轴机械手上/下移 动时, 可通过上升/下降按钮的操作方式, 保证机械手不 会进行多余的运动[4]。
在左/右移动时, 可根据实际需求分别选择放松或夹 紧状态, 按步操作, 确保手动操作工作可以顺利开展。
自动操作方式下, 每按一次按钮, 多轴机械手将从 原点开始自行运转并完成一个周期的动作。完成后停止, 等待下一次操作。
同时可运用相关的方程进行对多轴机械手的动作进 行编程。在 D-H 坐标下, 判定两坐标系中存在的参数, 列出转换矩阵为式中:
Cij = cosθ ij; cij = sinθij; i 为开链序号, i=1. 2. 3. …, n; j 为开链中的连杆序号, j=1. 2; ij - 1Aij 表示在坐标系中的 x 点以及 y 点之间存在的变换矩阵, 而 θij 可表 示在 x 点与 y 点之间的夹角。
由此方式, 机械手的旋转机构、转动机构组成的夹 持部分与真空吸盘相互结合行工件的夹持。可以根据工 件的大小以及形状进行对应的调整, 使工件能够被吸合, 以方便搬运工作的开展。
通常, 可在多轴机械手运动控制的操作面板根据实 际情况选择手动控制或自动控制。其中手动操作为按钮, 而自动操作由按钮以及旋钮共同组成。此外, 在操作面 板上也设置了电源供给按钮、紧急停车按钮, 以及电源 指示灯和机械手原点指示灯, 方便工作, 保证了工作的 便利性[5]。
2 基于 PLC 的多轴机械手运动控制设计方案
2. 1 PLC 的选型
PLC 选择时需要考虑满足大量输入和输出需求, 本 文选择西门子 226CPU, 含 24 输入, 16 输出, 总计 40 个 I/O 点。实际可连接 7 个扩展模块, 以保证多轴机械手运 动控制的稳定性。 7 个扩展模块最多扩展至 248 路数字量 I/O, 或者是扩展至 35 路模拟量 I/O点。在 PLC 的选择过 程中, 需要考虑到控制系统的高质量、输入输出点数量 足够多、具备一定数量的扩展模块, 以及运行性能、稳 定性和运行速度, 保证多轴机械手运动控制的质量以及 效率。在 PLC 选型的过程中, 还需要满足微型化和冗余的设计需求。其中 I/O点的冗余量要求为 10%。 2.2 输入/输出端子地址分配整体机械手控制可以配置 18 个输入量以及 6 个输出 量, 其中, 可在选择急停按钮的过程中选用手动复位按 钮[6]来实现急停。
2.3 控制系统的电气原理图
控制系统输入/输出电气原理图如图1 所示, 本控制 系统共配置了 18 个输入量以及 6 个输出量, 控制盘面板 的布置也根据该配置进行设计, 确保其布置的有效性以 及科学性。工作方式分为手动和自动两种方式。自动工 作方式下, 需要在启动之后选择单周期或者是连续多周 期。手动方式下, 只需要在系统的控制面板上选择相对 应的操作就可以实现机械手的全部动作。控制面板提供 了紧急停车按钮, 在发生突发事件时可按下按钮, 及时 阻断控制线圈的回路, 保证机械手停止动作。此时系统 仍然保持正常运行可控状态。当紧急情况被解决后, 按 动开启按钮, 即可回复正常工作 [7]。
2.4 系统的程序流程
系统设计的过程中, 最为基本的设计内容是 PLC 系 统流程的设计。为了保证后续工作的连贯性以及规范性, 保证工作效率, 需要有效地设计系统的流程, 降低数据 处理量, 提升系统运行的稳定性, 保证系统的科学性以及 合 理 性 。 系 统 程 序 编 程 中 的 数 据 的 计 算 如 式 (2) 所示。
式中: δ 为脉冲当量; ∂ 为步进角; η 为效率; ρ 为导程[8]。 2.5 机械手控制系统软件的整体设计
2.5.1 系统主程序
机械手控制系统软件主程序内设置了自动式步进控 制子程序、自动方式单周期控制子程序、自动方式连续 控制子程序以及手动控制子程序 4 个子程序, 共同组成 机械手控制系统软件主程序。通过对 I/O点进行不同的 设置实现手动以及自动操作。并实现单周控制、连续控制 等目的。此外也需要对设备进行相应的设计,使不同信号 与对应线圈带/断电相匹配, 实现机械手的不同动作[9] 。
2.5.2 系统控制子程序
当选择开关转到步进控制位置时, 进入步进控制子 程序, 完成机械手的步进动作。输入 I0.0 是每个步骤的 开始, 由开始操作按钮完成; I0. 1 是每个步骤的停止, 由停止按钮完成。例如, 按下 I0.0. M2.0 上电, 主程序 中的线圈 Q0.0 通电, 机械手完成下降动作; 当按下 I0. 1 时, M2.0 复位失去动力, 机械手停止下降。然后进入夹 紧动作的操作, 其过程与降低操作相同。其执行过程为 原点→ 下降→ 夹紧→ 上升→ 向右移动→ 下降-→ 放松→上升→ 向左移动-→原点的过程编写[10]。
2.5.3 下单周期控制子程序
单周期控制时, 机械手控制系统执行单周期控制子 系统, 机械手会按照设置的周期连续进行相应的动作, 且动作保持连贯性以及规范性。当将输入端 I0.0 作为本 次启动的初始位置时, 每按下 1 次 I0.0. 机械手会自动完成 1 个周期的连续性动作, 当完成 1 个周期的动作之后, 会自动回到原点, 并停止继续进行动作。而动作的完成 需要依靠机械手内部主程序中继电器的控制, 保证动作 的规范性。
3 监控系统的设计
在设计监控系统的过程中, 首先需要选择组态软件, 在选择的过程中需要保证其具备良好的扩展性以及继承 性, 进而满足其运行的需求, 同时也需要考虑到其冗余 功能以及网络结构, 对于网络结构而言通常选择分布式 网络结构。其次, 也需要选择最为合适的系统环境, 进 而保证监控器运行的稳定性, 保证监控图像的精准性以 及可靠性[11]。
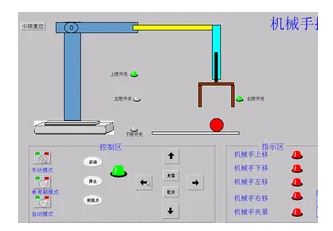
基于 PLC 的多轴机械手运动控制设计中监控系统也 必不可少。通过 iFIX 的自动化软件的运行方式, 成为 SCADA/HMI 中作为重要的组件。通过扩展以及继承的方 式, 更加高效的应用图形工具, 使 iFIX 用户可以利用高 性能的过程控制窗口, 检测单机人机界面, 明确在操作 现场中的多节点数据采集以及控制方式, 使 iFIX 的运行 规模可以满足多轴机械手的监控需求。首先, 可通过系 统环境选取的方式, 执行组态运行计划, 利用现场数据 检索的方式与 PC 端进行连接, 监测现场的设计状况, 增 设组态监控中的 PLC 开关量, 维持联动系统与监控报警 系统的动作关系。这样, 则可建立 I/O 数据连接方式, 让 iFIX3.5 组件软件能够适应工作环境, 通过工作平台中 “数据库管理器”的控制, 明确选择块的类型, 将数字量 输入 DI, 保证设备控制操作可以顺利开展, 从而编辑 “标签名”, 输入“ZDFQ”, 运用自动方式启动多轴机械 手, 使绘制组态画面更加清晰, 运用动画连接保证多轴 机械手中的数据可以清晰对展现, 利用“编辑脚本”实 现对多轴机械手脚本程序框中内容的翻译, 进而完成系 统的仿真设计计划, 使多轴机械手运动控制系统能够以 仿真组态的方式展现, 实现对“下降到位”“上升到位” 的监控[12]。
4 效果分析
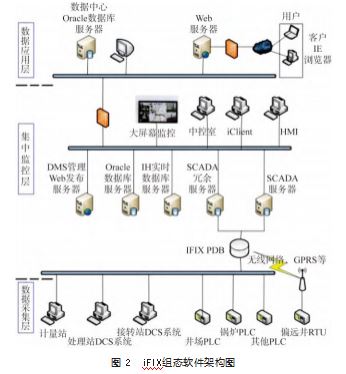
为了验证研究结果, 按照上述流程进行了具体的运 动设计操作。所得设计方案经严格的审核, 认为设计方 案科学合理, 可以投入使用。实践结果显示, 该设计方 案效果良好[13]。本文根据电气数据、系统程序、周期等 方面的变化规律, 建立了设计工作的立足点, 理清具体 的设计思路, 设计思路具体、可操作性强, 而且给出了 iFIX 组态软件的设计 (图 2), 并进行了细致的分析, 使 设计工作针对性更强, 有助于设计效率的提升[14]。实践 证明, 本文所提出的多轴机械手运动控制设计能够保证 方案的科学性和有效性, 可提升设计工作水平, 推动设 计工作的顺利开展[15]。
5 结束语
综上所述, 本文对 PLC 系统应用下的多轴机械手运 动控制设计工作进行了研究和探讨, 总结出了设计工作 的思路和规律, 为设计方案的构筑提供了一个更加清晰 的思路, 有助于更高效、更高质量地完成设计方案, 提 高设计方案的应用效果。研究给出了基于 PLC 的多轴机 械手运动控制设计、系统操控方式, 说明 PLC控制器可 以替换传统的继电器控制器, 可通过软件编写和硬件设 计实现机械手在两个工作台中的动作。 iFIX组态软件的 应用, 提供了远程设计和操作的方式, 可对多轴机械手 进行控制, 也能够执行在线远程监视工作。人机界面设 计的方式也提供了仿真操控工作的开展, 以满足控制系 统中的生产工艺需求。
参考文献:
[1] 李子昀 .基于 PLC 的多轴机械手运动控制设计[J].现代制造技 术与装备,2021.57(9):111-112.
[2] 罗永超,郭耿斌,黄世一,等 .基于 51 单片机的多轴机械手功能 设计[J]. 电子制作,2021(15):73-75.
[3] IIA NEWS. 台达多轴运动控制器提升非标机械手操作性能 [EB/OL]. (2021-02-25). https://www. iianews. com/ca/_01-ABC00000000000306066-402880f701c7020c0101c72dbaa11cae.shtml.
[4] 苗立晓 . 高性能多轴注塑机械手运动控制系统[Z].深圳:深圳 市华成工业控制股份有限公司,2020-06-05.
[5] 郭志冬 .基于 PLC 的桁架机械手控制系统设计[J]. 湖南邮电职 业技术学院学报,2022.21(2):44-46.
[6] 吴燕峰 . 自动化生产线中 PLC技术应用研究[J].企业科技与发 展,2022(5):79-81.
[7] 邱旋,王伟,李皓,等 . 项目式教学法在工业机器人综合实训的 应用与实践[J]. 内燃机与配件,2021(23):249-251.
[8] 姜帅,刘瀛,胡俊宏,等 .基于 PLC 的直角坐标机械手系统设计 [J]. 工业仪表与自动化装置,2021(2):17-20.
[9] 冯志芬 .基于 DELTA 机械手的物料分拣系统设计[J]. 无线互 联科技,2020.17(20):66-67.
[10] 王亚娟,李志 . 两自由度并联机械手控制系统设计[J].微型电 脑应用,2020.36(6):74-77.
[11] 王宇辰,施勇成,蔡红健 . 一种数控生产线上下料桁架机械手 系统设计[J]. 江苏工程职业技术学院学报,2020.20(1):10-14.
[12] 王一帆,赵琛,袁梦扬,等 . 六自由度机械手控制系统设计与仿 真[J].数字技术与应用,2022.40(8):194-199.
[13] 黄波,赵飞,王佳,等 . 基于机器视觉自动化装配系统研究[J]. 制造技术与机床,2022(9):117-122.
[14] 牛威杨 .基于Zynq平台的软硬件协同方法研究[J].信息技术 与信息化,2022(8):119-122.
[15] 王珂,谭昕 .基于外骨骼机器人的人机交互控制研究综述[J]. 机械工程师,2022(8):50-53.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/64424.html