SCI论文(www.lunwensci.com):
摘 要 :PLC 技术目前被广泛的应用到了工业机器人系统中,PLC 技术成为了工业机器人最为重要的控制技术。我国在向着工 业化不断发展的同时, 在实际生产阶段从功能和操作精度方面, 不断的加大了对工业机器人的要求。因此, 需要深入的研究PLC 技术,采用PLC 技术来实现对工业机器人的有效控制,以此来实现对生产效率和生产质量的提升。本文简要的对工业机器人系 统的PLC 控制技术进行了分析和研究, 目的是为了促进设计工作在日后的良好开展。
关键词 :PLC 控制技术 ;工业机器人 ;系统设计 ;实现
目前,智能改造已经在大多数工厂得到了实现,因此,PLC 技术也广泛的被应用到了工业机器人系统的控制环节中。然而, 想要从生产精度和生产质量方面对生产系统进行有效的提升, 就需要控制好工业机器人,对控制流程和控制系统进行深入的 优化。要想采用PLC 技术来优化控制环节,首先需要做好对工 业机器人系统的了解,并通过对PLC 控制技术的结合,来分析 和讨论所面临的各种问题, 以此为基础, 对控制环节进行有效的提升。
1 基于PLC控制的工业机器人介绍
1.1 工业机器人的基本结构
工业机器人主要由大臂、小臂、升降臂、底座、丝杠等构成, 采用的是电气传动,升降臂沿着 Z 轴实现上下直线运动,大臂、 小臂的两个关节绕 Z 轴进行旋转运动来带动手腕和手抓实现各 种动作,共有四个相互独立的驱动关节、六个自由度。减速器连 接电机输出轴与机器人机械手的关节,将电机的输出力矩传递 给大小臂关节, 以实现其各种动作。
1.2 工业机器人系统概述
目前,工业领域在向着自动化发展的同时,对 PLC 控制技 术、工业机器人以及 CAD 等技术进行了广泛的应用,从思路和 理论方面为工业领域提供了更多优化和提升自动技术的支持, 其作用是不容忽视的。同时,随着各种科学技术的不断发展,各 学者深入的研究了工业领域所应用的PLC 技术和机器人技术, 也以此为基础, 有效的扩展了系统的各项功能, 工业领域也采用 了更加全面和完善的标准来衡量自动化技术。在这种情况下, 应 用PLC 技术能够为生产任务的完成提供质量和数量的保证,并 有效的提升一体化技术在机电领域的发展 [1]。
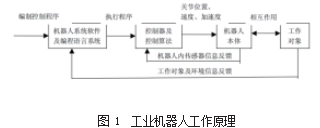
1.3 PLC工作原理
在对工业生产进行控制的过程中,PLC 控制系统发挥出了 极大的优势, 在具有存储功能的设备中, 能够对完成编写的程序 代码进行存储,然后,由程序对数据进行采集和计算,中央处理器以集中的形式对其进行处理后,程序进入运行状态,同时,由 机械设备中的软件对其进行控制,机械设备在接收到软件发出 的指令后,能够按照规定的流程进行操作和加工。PLC 自动控制 系统所具备的自动控制功能, 能够对人工操作进行提点, 从控制 和操作方面,对人力资源进行了节省,并且,能够对更多的产品 进行加工,有着较强的适用性,可以使生产更加精细和高效,实 现高难度的生产, 工业化生产阶段对它的应用, 能够给控制工作 带来极大的优势 [2]。
2 基于PLC控制的工业机器人优势
在控制环节所应用的PLC 技术有许多优点,例如运用便捷, 在工业机器人系统中通过对它的应用, 能够从质量、抗干扰能力 等方面, 对工业机器人性能进行提升。通过对此类技术的实践得 知,此类技术在运动控制和网络通讯方面具有更加强大的指令, 工业领域采用此类指令能够实现对机器人各种运动的控制,能 够实现对协调件等工业机器人部件的控制,尤其是PLC 技术能 够从定位精度和运动效率方面,提升对工业机器人的控制。此 外,在控制环节通过对PLC 技术的应用,能够从灵活性、扩展性 以及操作性等方面, 实现对工业机器人的提升, 能够使工业机器 人的自动化工作得以实现。应用PLC 技术进行控制,能够更加 便于使用工业机器人,并且更易实现对工业机器人功能的编写, 所以,工业领域在研制工业机器人时,通过对PLC 技术的应用, 其开发周期能够得到大幅缩减。由于其有着顽强的工作能力, 所 以工业领域采用 PLC 技术来控制机器人,相比其他技术来说, 其工作效率、抗干扰能力以及可靠性更强。此外,由于其编码控 制器的核心技术是PLC 技术,借助于其内部系统的代码加密功 能,此类编码控制器能够很好的保护代码,因此,工业机器人具 有良好的抗干扰能力。所以,工业机器人在PLC 技术的控制下 能够实现正常工作 [3]。
3 工业机器人系统控制的实现
3.1 对工业机器人系统的有效控制
PLC 编码控制器属于控制器中最新的一种类型,其在工业领域中的现代化发展基础就是控制技术和运动部分,目前随着 科学技术的不断发展,在总控制系统中通过对PLC 编码控制器 的使用, 使其具备了各种不同的辅助功能, 微处理器是其核心控 制部分, 将相关软件, 运动驱动以及仿真技术等作为了系统的辅 助应用。工业领域通过PLC 技术对机器人系统的控制,在实际 控制阶段,工业领域中的PLC 编码控制器,能够根据加工数据, 对机器人的实际加工操作情况进行实时的监控, 以此来及时、具 有针对性的对各种出现的题进行处理解决。
工业领域在机器人系统中对PLC 控制技术的应用,使加工 技术具有了机电一体化的特征,被广泛的应用到了各个社会生 产领域中,大幅度的提升了产业效率。在整个系统中,PLC 编码 控制器在处理部分中具有核心地位,其能够通过对整个系统的 控制, 使其保持正常运行, 并且能够结合实际情况对相应的指令 进行具体的发布。相关指令信息在经过工作人员的输入后, 能够 科学有效的控制工业机器人系统 [4]。
3.2 工业机器人控制系统整体方案设计
工业领域以往所采用的机器人有着较高的自由度,各关节 之间无法进行联动,并且其驱动系统包含了伺服机和步进电机, 驱动器在接收到来自运动控制卡的命令后,能够根据相应的转 动和转速对电机进行控制。本文对工业机器人的设计中, 将上位 机和运动控制卡作为了控制系统的核心,其本体涉及到了上位 机,运动控制卡以及伺服电机等。并且按照操作、运动以及机器 人本体三个模块对系统进行控制。操作模块指的就是上位机, 在 机器人界面中主要能够起到显示的功能,同时能够根据运动学 方程, 将机器人计算所得的正逆解以运动指令的形式进行发送 ; 能够控制运动的模块也称之为运动控制卡,其主要能够将所接 收到的来自上位机的指令,以脉冲信号的形式发送给伺服驱动 器,同时能够实现对机器人以及伺服驱动器对于正负限位以及 伺服完成准备等信号反馈的接收 ;主要是为了对机器人本体进 行控制,由于机器人型号不同其自由度也有所不同,因此,上位 机能够通过对各个关节转动的控制, 来对机器人进行控制, 使其 能够完成相应的工作任务 [5]。
4 PLC控制未来在工业机器人系统中的发展
4.1 对统一化标准的实现
针对目前的情况来说,工业领域对可编程控制器在机器人 系统中的基础应用,能够使其智能化特性得到极大的提升,针对此类特点来说,未来在进行研究时,需要做好对以下内容的 遵循 :首先,工业领域在操作机器人系统的过程中,通过对PLC 编码控制器的应用,能够使机器人的仿真设计以及模拟实验更 加准确, 给机器人系统带来优化的操作, 使机器人能够具有更强 的可操作性, 为工作阶段的机器人提供准确性的保证 ;其次, 控 制技术通过可编程控制器能够更加完善,使工业发展能够具有 自动化的特征, 通过对可编程控制器的加强, 能够对机器人进行 更加完善的控制,机器人在控制下能够实现对复杂操作的完成。 在机器人系统中通过对可编程控制器的应用,能够提升 3~5 倍 的控制效果 ;最后, 工业领域在控制机器人系统的过程中, 可在 机器人系统中,通过PLC 控制技术实现对网络通信性能的加强, 使不同的机器人之间能够实现对网络系统的连接,通过可编程 控制器能够使机器人系统在工业领域的统一化标准得以实现 [6] 。
4.2 对机电一体化目标的实现
目前,工业领域中对自动化技术的应用,将机器人 PLC 控 制以及CAD等技术作为了重点, 工业领域发展和完善此类技术, 能够为自动化技术在工业领域中的现代化科学发展提供相应的 参考依据,有着十分重要的促进作用。由于近几年不断发展和 推进的科学技术,工业领域采用PLC 技术对机器人系统的控制, 已经在工业生产中得到了实际应用。在进行工业生产的过程中, 通过PLC 技术对机器人系统的控制,能够使其作用得到极大的 发挥, 并且随着工业生产领域对其的不断应用, 自动化技术在工 业领域的发展情况,已经成为了衡量其应用效果和质量的标准。 工业领域采用PLC 技术对机器人系统的控制,都是多项任务得 到自动化的完成,使工业生产的推进能够更加顺利。此外,工业 领域采用PLC 对机器人系统的控制,能够顺利的完成工业生产 任务, 使机电一体化的目标得以实现 [7,8]。
5 结语
随着PCL 技术的不断发展和更新,以往在工业领域所采用 的机器人控制系统对人力、物力和财力有着大量的需求, 无法对 机器人进行完整、可靠的自动控制,因此,本文以PCL 技术为基 础,对机器人的自动化控制进行了优化设计。通过对可靠、稳定 的PCL 技术的应用,为机器人提供了更优的自动化控制,使整 个工业领域得到了提升和发展, 使机器人的工作变得更高效, 并 且为人们带来了更高品质的生产生活。
参考文献
[1] 张丰华 , 韩宝玲 , 罗庆生 , 等 . 基于PLC 的新型工业码垛机器人控制系统设计 [J]. 计算机测量与控制 ,2009,17(011):2191-2193,2196.
[2] 焦玉成 , 俞娟 , 杜逸鸣 . 基于PLC 与触摸屏的码垛工业机器人操作系统设计 [J]. 包装工程 ,2019,v.40;No.413(23):184-189.
[3] 王哲禄 . 基于PLC 与工业机器人的抛光打磨工作站控制系统的设计与实现 [J]. 制造业自动化 ,2019,041(007):103-105,147.
[4] 庞党锋、宋亚杰、王春光、刘彦磊、李传军 . 基于工业机器人的数控加工控制 系统设计 [J]. 机床与液压 ,2020,v.48;No.519(21):67-69.
[5] 朱剑锋 . 基于PLC 控制的工业机器人系统的研究与实现 [J]. 建筑工程技术与 设计 ,2017,000(009):497-497.
[6] 陈保帆 , 韩亚军 . 基于PLC 控制产线机器人系统设计与研究 [J]. 数字技术与应 用 ,2014,000(003):7-8.
[7] 童玉林 , 马金玉 , 吴伟彪 , 等 . 基于PLC 的工业机器人示教系统开发 [J]. 科技与 创新 ,2015,No.46(22):9-10.
[8] 何 小 妮 . 基 于 PLC 控 制 技 术 的 工 业 机 器 人 系 统 研 究 [J]. 大 科 技 ,2019,000(012):220-221.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/34411.html