SCI论文(www.lunwensci.com)
摘要 :传统的扫地机器人无法完成对于楼梯的清洁, 人工清洁楼梯费时费力且有一定的安全隐患 。针对设计实现机器人自主爬楼 清洁, 采用了行星轮式机构与麦克纳姆轮的结合来实现平地行走和楼梯攀爬, 加上吸尘机构以及各硬件驱动控制电路和控制程序 的结合, 使得机器人可以自主进行楼梯的逐阶清洁, 实现一定的路径规划, 并且能够避障和防跌落, 极大程度地摆脱人为控制, 减轻人力负担 。通过相关程序和各驱动模块的链接, 将程序所表达的功能通过 Arduino 电路板输送至相应模块以达到预期效果 。通 过硬件电路设计进行电机的驱动和控制, 再由电磁离合器控制电路对麦克纳姆轮和行星架组成的行星轮进行控制, 共同实现“平 地清洁”和“楼梯清洁”, 经过红外避障传感器和超声波传感器检测到的环境信息自主对相应工作做出调整, 使机器人具有自适应 的能力, 通过电压检测电路及水平开关检测电路对机器人剩余电量和所处倾斜状态进行实时监测, 确保机器人正常平稳运行。
关键词 :扫地机器人,避障,硬件电路设计,楼梯清洁,自适应
Design of Hardware Circuit for Stair Self-adaptive Cleaning Robot
Lu Guiping, Li Chunlei, Liu Zhuoyun, Ye Xuqian, Li Junming
(Industrial Automation College, Zhuhai College of Beijing Institute of Technology, Zhuhai, Guangdong 519088. China)
Abstract: The traditional sweeping robot can not complete the cleaning of stairs . Manual cleaning of stairs is time-consuming and laborious, and there are certain potential safety hazards. For the design and realization of the robot's autonomous stair-climbing and cleaning, the combination of the planetary wheel mechanism and the Mecanum wheel was used to realize flat-ground walking and stair climbing . In addition, the vacuum mechanism and the combination of various hardware drive control circuits and control programs made the robot . It could independently clean the stairs step by step, achieved a certain path planning, and could avoid obstacles and prevent falls, greatly getting rid of human control and reducing the burden of manpower. Through the link between the relevant program and each drive module, the function expressed by the program was transmitted to the corresponding module through the Arduino circuit board to achieve the desired effect . The motor was driven and controlled by the hardware circuit design, and the planetary gear composed of the Mecanum wheel and the planet carrier was controlled by the electromagnetic clutch control circuit, so as to realize "level cleaning" and "stair cleaning" together. The environmental information detected by the ultrasonic sensor automatically adjusted the corresponding work , so that the robot had the ability to adapt, and the remaining power and the tilt state of the robot were monitored in real time through the voltage detection circuit and the level switch detection circuit to ensure the normal and stable operation of the robot.
Key words: sweeping robot; obstacle avoidance; hardware circuit design; stair cleaning; self-adaption
0 引言
随着科技的飞速发展和人民生活水平的不断提高, 机器人逐渐进入人们的生活, 并渐渐渗透到生活的各个 领域 。在卫生清洁方面, 传统的扫地机器人有着不错的 发展, 但他们仅限于在平地上工作, 不能对楼梯进行清 洁, 这对于复式楼房来说, 其清洁范围非常局限, 不能 满足人们对美好物质生活向往的要求。
要实现机器人对楼梯进行清洁, 首先要实现机器人 的上楼和下楼 。经调查, 目前实现爬梯越障的机器人根 据其实现形式的不同主要分为[1]轮系式 、履带式和腿足 式[2] 。轮系式机器人又以单轮式和行星轮式最为常见,单轮式机器人的越障能力较弱, 但凭借其较好的承载能 力及较快的平面移动速度得以广泛应用 。行星轮式机器 人则拥有着较好的越障能力, 简单的机械结构和较快的 移动速度, 因此也被广泛应用。
根据市面上现有的各类型扫地机器人的结构特点, 进行优化改进 、取长补短, 设计了行星轮[3]与麦克纳姆 轮相结合的机构, 用超声波传感器和红外传感器对环境 信息进行采集, 通过程序设计对信息进行判断, 再将程 序所表达的功能通过 Arduino 电路板传输给各工作模块, 使机器人能够自主爬楼清洁并自适应不同的阶梯环境 。 同时安装的吸尘盒内置吸附碳, 吸附空气中有害物质,能够净化粉尘和提高清洁效率。
1 机器人工作过程的设计与分析
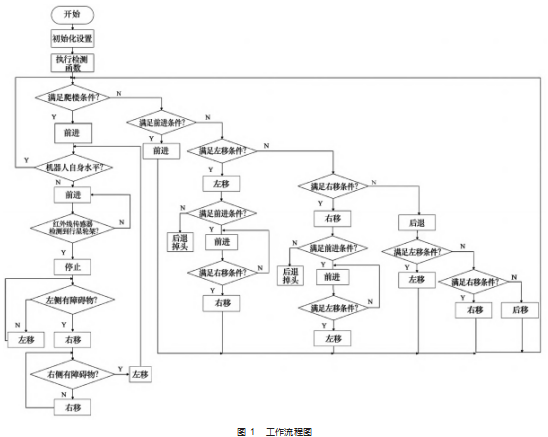
通过采用麦克纳姆轮与行星轮[4]相结合的轮系式爬楼 机构, 同时实现“平地清洁”和“楼梯清洁”双模式。通 过电磁离合器来进行两个模式的切换 。采用红外避障[5]传 感器和超声波测距传感器[6]对环境信息进行检测反馈 。运 用水平开关, 间接检测机器人状态, 并将所处状态反馈给 Arduino, 确保机器人正常运行 。工作流程如图 1 所示。
进行平地清洁工作时, 机器人根据规划路径进行清洁, 当前方无障碍物时, 机器人直线前进进行清洁工作, 当检测前方有障碍物时机器人横向移动一定距离并再次 判别, 当判别前方阻碍为障碍物时执行绕行指令 。当判 别到达清洁区域边缘时, 机器人原地转向并继续直线前 进进行清洁, 如此周期执行直至到达楼梯边缘 。进行楼 道清洁工作时, 由电机驱动行星轮执行主要爬楼梯任务, 此时麦克纳姆轮仅起到辅助爬楼的功能, 当到达相应楼 梯阶层时, 行星轮停止运转, 由麦克纳姆轮带动机器人 进行横向清洁, 当检测到达楼梯横向边缘时开始返程清 洁, 再次到达楼梯横向边缘时, 麦克纳姆轮停止运转, 机器人停止横向移动 。行星轮继续执行爬梯工作, 如此 周期执行楼道清洁工作直至再次识别到达平地 。当水平置于机器人前端的超声波测距传感器判定前方为楼梯并 进入楼道清洁工作模式时, 水平开关处于倾斜状态 。而 当机器人持续工作至楼梯阶末端时, 超声波测距传感器 检测前方无障碍物, 但水平开关仍处于倾斜状态, 机器 人继续楼道清洁工作, 直至机身整体位于楼道顶层的平 台之上, 此时水平开关处于水平状态, 机器人切换为平 地清洁工作模式 。系统功能如图 2 所示。
2 机器人的结构设计
爬楼机构采用麦克纳姆轮与行星轮[7]相结合的 4 个轮 组式机构[8], 用设计制作的板材作为机器人的承载式机 身, 吸尘器和尘盒置于板材上方进行尘屑的收集 。如图 3 ~ 5 所示。
3 机器人的控制
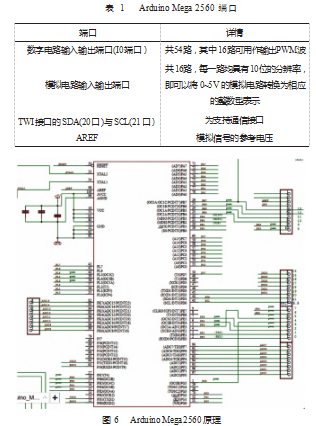
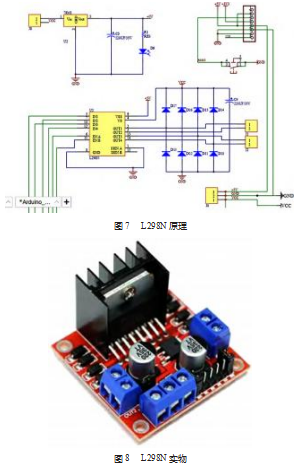
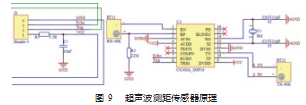
表 1 所示为 Arduino mega 2560 端口 。该机器人采用Arduino 开源平台对其整体进行驱动控制。由于该机器人使 用到的超声波模块及红外避障传感器等元件较多, 所以所 需的 IO 端口 (数字电路输入输出端口) 较多, 最终选用 了 Arduino Mega 2560 来对机器人进行控制 。如图 6 所示。根据直流减速电机的驱动与控制要求, 该机器人采 用了双 H 桥电机驱动模块 。该模块的主控芯片为 L298N, 具有驱动能力强, 发热量低, 抗干扰能力强等优点 。主要用于接收 Arduino 指令并根据相应指令发送电信号控制 电机进行前进 、后退 、转弯等动作, 是驱动电路的核心 控制模块, 模块还可通过 PWM (脉冲宽度调制) 进行调 速从而控制电机转速以满足工作要求 。如图 7 ~ 8 所示。采用 HC-SR04 型超声波测距模块[9]对周边环境进行 检测, 反馈与障碍物之间的距离 。该传感器在设计中主 要用于检测机器人所在位置与周边障碍物的距离, 使 Ar⁃ duino 能够根据反馈信息做出相应判断, 当到达相应距离 时根据事先设定的程序指令使机器人做出相应动作或切 换工作模式 。如图 9 ~ 11 所示。
采用红外避障传感器[9]对周边障碍物进行检测[10], 判断所检测方向能否正常通行 。该传感器主要用于检测 有效范围内有无障碍物并发送相应电信号, 根据其特性用于检测机器人是否处于可通行位置, 也可运用于检测 机器人所在地面环境防止从楼梯跌落。如图 12 ~ 13 所示。
该设计采用 24 V 锂电池作为驱动电源, 在连接工作 电压较低的模块时需要由降压模块进行调节降压处理 。 该模块选用了型号为 LM2596 的 DC-DC 可调降压模块, 主要应用于将输入电压调节至相应元器件额定工作电压 的降压领域 。如图 14 所示。
4 机器人工作电路设计
4.1 电机驱动电路
电机驱动电路主要用于连接 Arduino 对电机进行驱动 控制 。根据机械结构及力学性能要求, 电机采用了转速 66 r/min 、工作电压 24 V 的大扭矩直流减速电机 。根据 驱动要求和元器件的性能要求选用了 24 V 锂电池作为驱 动电源, 连接于 L298N 电机驱动模块的 12 V 供电端口和 GND 端口上, 再由 L298N 电机驱动模块[10]的两个 OUT 通 道分别控制两个 24 V 直流减速电机[11], Arduino 可通过发送指令信号对电机进行调速及驱动控制 。L298N 电机驱 动模块由 Arduino 的 5 V 端口提供电源, Arduino 电路板 则外接 7.4 V 电源供电以确保 Arduino 电路板的稳定运行。
4.2 电磁离合器控制电路
电磁离合器控制电路主要用于“平地清洁”和“楼 梯清洁”两种工作模式的切换, 机器人通过 Arduino 电路 板对电磁离合器进行控制完成切换 。控制电路选用的为 一路 5 V 继电器, 通过连接继电器常开端口 ( NO 端口) 和继电器公用端口 ( COM 端口) 使常态下继电器保持电 路常开, 电磁离合器断开, 当 Arduino 发送控制信号至继 电器 IN 端口, 继电器主电路连通, 电磁离合器吸合 。根 据要求选用了 24 V 锂电池作为该控制电路工作电压来 源, 将 24 V 锂电池正负极分别连接于继电器接电源正极 端口 ( DC+端口) 与接电源负极 ( DC-端口) 以提供控 制电路主电路的工作电压 。 5 V 继电器控制端口 ( IN 端 口) 通过 Arduino 电路板输出 5 V 高电平电信号触发控制 电 路, 使 继 电 器 常 开 端 口 ( NO 端 口 ) 与 公 用 端 口 ( COM 端口) 连通, 主电路通电使电磁离合器吸合。
4.3 电量检测电路
电量检测电路主要用于监测 24 V 锂电池的电量状态 以保证其输出电压能够满足各驱动电路及控制电路的工 作要求 。利用 Arduino 电路板的特性进行线路连接, 对锂 电池电压值的监测, 并通过不同的 LED 灯呈现出来 。如 图 15 所示。
从 Arduino 电路板数字电路输入输出端口引接至 LED 灯正极, 各 LED 灯都需串联一个 330 Ω 的电阻防止因电路 空载烧毁 Arduino 电路板, 从而确保 Arduino 电路板可根据 电压值进行反馈 。因锂电池输出电压为 24 V, 而 Arduino 电路板输入端口可承受工作电压为 0 ~ 5 V, 因此需选用降 压模块对锂电池的输出电压进行降压处理。检测电路通过 对降压后电压的监测对锂电池剩余电量进行判断, 当处理 后电压大于其50% 时, 绿灯亮起; 当处理后电压大于20% 且小于50% 时, 绿灯熄灭, 黄灯亮起; 当处理后电压小于 20% 或者检测电路电压为 0 (即将 24V 锂电池断开连接) 时, 黄灯熄灭, 红灯亮起 。以此来推断其电量损耗程度。
4.4 水平开关检测电路
水平开关检测电路主要用于检测机器人是否处于倾 斜状态, 以此来判断机器人当前所处的工作模式, 从而 进行相应工作。
由 Arduino 电路板提供5 V 电压接于水平开关的一端进 行供电, 开关的另一端与330 Ω 的电阻及Arduino 电路板的 模拟电路输入输出端口进行连接, 水平开关的状态信号由 此向 Arduino 电路板进行反馈, 电阻另一端连接 Arduino 电 路板GND 端口形成回路。外接LED 指示灯由数字电路端口 引接, 串联 330 Ω 的电阻并与 Arduino 电路板 GND 端口形 成回路。当水平开关处于倾斜状态时, Arduino 电路板针对 其状态环境进行相应的控制反馈, 并由LED 灯显示状态。
4 .5 测距传感器与避障传感器的连接
通过超声波发出及被接收的时间计算出超声波测距 模块[12]与前方障碍物的距离, 并回馈给 Arduino 电路板以 进行相应地控制 。该传感器工作电压为 5 V, 将其 VCC 端口与 GND 端口连接 Arduino 电路板的 5 V 端口与 GND 端口对传感器进行供电 。其 Trig 端口与 Echo 端口则连接 至 Arduino 电路板上相应的控制端口, 给予 Trig 端口一个 高电平信号, 传感器将循环发射若干个脉冲, 当检测到 反弹信号时, Echo 端口会相应的产生高电平信号, Ardu⁃ ino 电路板也将获得距离信号值。
红外避障传感器主要用于对机器人周围环境是否存 在障碍物进行探测, 从而判断机器人所处状态以进行相 应的驱动控制 。红外避障传感器工作电压也为 5 V, 可 将 Arduino 电路板的 5 V 端口与红外避障传感器的 VCC 引 脚进行连接, 并将电路板的 GND 端口连接于传感器的 GND 引脚形成回路 。传感器的 OUT 引脚可将检测结果通过数字形式输出给 Arduino 电路板, 以此对周围环境所处 状态进行推测 。如图 16 ~ 17 所示。
5 机器人的仿真与调试
将各驱动电路及控制电路分别进行连接调试, 24 V 锂电池连接分线器对各电路进行分线供电, 通过端口连 接电量检测电路进行实时监测 。利用面包板的特性, 将 Arduino 电路板 5 V 供电端口与接地端口外接于各模块, 满足电路模块的供电需求 。如图 18 ~ 21 所示。
6 结束语
本设计实现了清洁机器人在工作领域上的突破, 实 现了通过各模块反馈信号进行自检测且通过检测结果对机 器人所处状态进行剖析与干预以确保机器人稳定运行。该 设计的主要创新点如下。( 1 ) 实现了扫地机器人的爬楼清 洁。使扫地机器人进入楼梯清洁时代, 大大提高了清洁效 率, 对扫地机器人未来的发展具有重要影响。(2 ) 实现机 器人的自适应 。使机器人具有自适应环境的能力, 摆脱 了人为的干预, 降低了人的操作成本。(3 ) 减少人工清 洁的劳动风险 。楼梯清洁本身存在一定安全隐患, 通过 实现机器人进行楼梯清洁, 消除了人工清洁存在的风险。
参考文献:
[1] 童俊华 . 行星轮式爬楼梯机器人小车的研究[D]. 赣州:江西理 工大学,2009.
[2] 姚怡 . 可上楼梯的机器人设计与实现[D]. 北京:北京邮电大学,2013.
[3] 孙宇轩 . 爬梯轮椅机器人的结构设计与运动研究[D]. 秦皇岛: 燕山大学,2018.
[4] 戴本圣 . 多功能行星轮式爬楼梯轮椅的设计与研究[D]. 徐州: 中国矿业大学,2017.
[5] 胡珂 . 基于 Arduino 的智能小车测距安全行驶系统的研究[D]. 西安:长安大学,2015.
[6] 张建龙 . 清洁机器人避障控制及路径规划[D]. 武汉:武汉科技 大学,2015.
[7] 梁虎 . 全方位水平姿态爬楼机器人机械系统及关键技术研究 [D]. 上海:东华大学,2014.
[8] 李正中, 张青松,邓翱,等 . 轮组式爬楼机器人的设计与实现[A]. 重庆:重庆科技学院,2013.
[9] 于洋 . 基于 Arduino 的自动避障及通信控制智能小车系统的 研究与设计[D]. 吉林:吉林大学,2017.
[10] 汪光辉,朱晨昊,周正飞,等 . 一种智能红外避障自动扫地机器 人的时间[J]. 集成电路应用,2019.36(6):78-79.
[11] 乔梁 .基于L298N电机驱动模块的设计与实现[Z]. 万方科技学院 .
[12] 程丽霞 . 智能扫地机器人系统设计[J]. 机械工业标准化与质 量,2016(9):27-29.
[13] 武可艳 . 爬楼越障机器人机构分析与综合研究[D]. 郑州:河 南工业大学,2013.
[14] Jogal S , Sharma K . Swachh-Bharat Bot: A Sweeping Robot[M]. CAD/CAM, Robotics and Factories of the Future. Springer In⁃ dia, 2016.
[15] Waldron K J , Akinfiev T , Armada M , et al. Climbing cleaning ro⁃ bot for vertical surfaces[J].Industrial Robot,2009. 36(4):352-357.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/56582.html