SCI论文(www.lunwensci.com):
摘要:为解决零件加工生产车间人工运输成本高、物流配送智能化程度不高的现状,设计一款新型的智能运输机器人。该机器人是依据单片机技术、传感器技术、机械设计和机械原理的基础知识,选择简单的机械结构及控制方案,通过SolidWorks实体三维软件和KeilμVision编程软件设计的。其实验结果表明,本机器人可以准确地读出和显示出物料的重量,正确识别二维码和交通灯,精准躲避障碍物,语音播报对应的提醒,自主规划路线且做到启程和返程,实现了物流配送需要的功能要求。其机器人具有结构简单且稳定,适应性能力强,系统可靠性高,智能化程度高,与传统运输方式相比,减少了人力劳动和提高了运输效率,达到了降低生产产品成本和提高生产效率的效果,并且对于零件加工生产车间物流配送智能化的发展有一定的推动作用和对于物流行业的配送智能化的发展也有一定的参考价值。
关键词:嵌入式;路径规划;识别二维码;自主避障;MPU6050
Intelligent Transportation Robot Based on Embedded Path Planning
Lin Yubin,Chen Haojie,Xiao Jianyong,Wu Zhian,Li Derong※
(Guangdong Ocean University School of Mechanical and Power Engineering,Zhanjiang,Guangdong 524088,China)
Abstract:In order to solve the current situation of high manual transportation cost and low intelligence of logistics distribution in parts processing and production workshop,a new intelligent transportation robot was designed.Based on the basic knowledge of single chip microcomputer technology,sensor technology,mechanical design and mechanical principle,the robot selected a simple mechanical structure and controled scheme through SolidWorks solid three-dimensional software and KeilμVision programming software design.The experimental results show that the robot can accurately read out and display the weight of materials,correctly recognize QR codes and traffic lights,accurately avoid obstacles,broadcast corresponding reminders by voice,independently plan routes and achieve departure and return,and realize the functional requirements required by logistics distribution.The robot has simple and stable structure,strong adaptability,high system reliability and high degree of intelligence.Compared with the traditional transportation mode,it reduces human labor and improves the transportation efficiency,and achieves the effect of reducing the cost of production products and improving the production efficiency.It also plays a certain role in promoting the development of intelligent logistics distribution in parts processing and production workshops and has a certain reference value for the development of intelligent distribution in the logistics industry.
Key words:embedded;path planning;identify QR code;autonomous obstacle avoidance;MPU6050
0引言
在科技高速发展、智能化水平越来越高的现状下,零件加工生产车间从传统的物料运输模式逐渐向智能化运输模式转变成为了一种趋势。零件加工生产车间的物料配送是整个产品生产中至关重要。加工产品能否被高效和精准地运输到对应的工位上是整个加工过程顺利进行的前提,而要实现整个加工过程顺利进行就需要对零件加工车间物料运输进行智能化[1]。
目前,零件加工生产车间运输主要采用手动推车运输和半自动化运输器械。张玉等[2]通过使用不同类型的手推车,来实现不同零件的运输。宁金新[3]在加工车间利用人工驾驶叉车进行工件运输。郝力文等[4]采用PLC编程控制有轨运输小车,来实现物料的输送。上述研究提供了产品生产加工运输的不同方式,这些运输方式都可以完成物料运输,但是存在物料输送效率低、人工成本高、安全性问题和智能化程度低,而其他运输设备也存在一定的限制和缺陷。设计开发基于人工智能运输机器人可以有效地解决上述存在的问题,并且还可以提高零件加工生产车间的生产效率和生产力。
本文基于嵌入式,路线规划等技术开发设计了一款应用于零件加工生产车间运输智能运输机器人。智能运输机器人是一种自动化运输设备,具有智能化程度高,能适应复杂的环境,可以提高物料的运输效率,从而提高加工产品的生产效率[5]。对此,零件加工生产车间采用智能运输机器人运输物料不仅可以减轻人为的劳动力以及减少人工成本的费用,而且能够有效的提高加工产品的运输效率和速度,从而提高零件加工生产产品车间的生产效率和生产力。这也符合“中国制造2025”的制造智能化的发展要求。
1运输机器人的总体方案
1.1结构设计
(1)视觉识别结构
前端摄像头通过亚克力板和3D打印件压紧的方式,再与音响连接一起,整部分安装在机器人第二层的最前端。摄像头的任务是对物料的二维码和交通信号灯的变换进行识别并进一步做出判断,而摄像头的稳定性是需要考虑的重要因素,在保证可实现功能的前提下通过降低自由度来稳定摄像头是一个可行的办法,因此摄像头只需固定在具有一定倾角的3D打印件上,在不影响机器人稳定性的前提下可进行小幅度的上下角度调整,更便于识别交通信号灯。
(2)避障定位结构
为保证机器人避障定位的准确性,必须排除障碍物颜色与环境灯光对机器人避障的影响,此系统采用了超声波进行避障。为避免障碍物高度的影响,将超声波模块安装在适合的高度,即第二层板上。为保证超声波的全方位识别,在机器人的前端两侧和机器人的左边安装3个超声波模块可实现全方位避障。在排除对超声波定位有影响的因素后,可再配合其它系统进行布局的合理安排。
(3)物料储存结构
物料存放装置内部尺寸的设计为70 mm×70 mm×70 mm的尺寸。选用舵机搭载在物料仓旁边的固定架上以及搭配了红外感应来控制仓门的开启,以剪刀式的开关门形式来对物料存放仓门的开启及关闭进行控制,不会干涉到机器人的其它工作,以达到精准装卸的效果,并且更有效地利用空间使结构更加紧凑。在货仓里装有压力传感器,当放进物料时压力传感器进行工作,把物料的重量测出并显示在显示器上。
(4)语音结构
在第二层板上搭载一座音响,设置好提醒的语音及工作时间,在工作人员装卸物料环节后,机器人发出语音提醒,工作人员再根据机器人指令经行相关操作。
(5)行走结构
在近似长方形底盘上携带4个电机和4个橡胶轮胎。
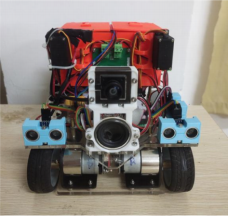
4个电机及驱动轮子整体左右对称分布在底盘,通过分别控制4个直流减速电机的转速,能实现各种角度的转向以及前后直线运动,可完成复杂的路线。行进过程中小车机动性强,距离控制的精准度高,行走过程平稳,便于控制,在模拟场地内能够自主规划路线前提下,实现小范围位移来进行精准避障,其他系统装载在第二层,和行走系统独立分布,达到行走系统与其他系统互不影响的效果。如图1所示。
图1运输机器人实物
1.2工作原理
智能运输机器人采用四轮驱动,由以STM32F407 ZGT6为核心的主控制板分别输出PWM信号控制直流减速电机转动[6]。机器人通过超声波模块进行精准避障和摄像头识别交通灯状态,行进的区域是结合真实现场环境,设置出发区、收货点、障碍物、交通道路、交通灯等待区及红色停止线的模拟场地。
2运输机器人硬件电路设计
2.1 MPU6050六轴控制器
系统主要是通过采集倾角来控制机器人前进的方向。MPU6050芯片集成了三轴陀螺仪、三轴加速度计和数字运动处理器DMP[7]。MPU6050芯片将测得机器人的倾角,通过AD转换,把测得的模拟信号转化为数字信号,然后通过IIC通讯把数字信号传输给主控制器[8-9]。2.2超声波模块机器人避障功能实现采用HC-SR04超声波测距模块,该模块通过时差法测量声速[10],得到机器人与障碍物的距离,测量的精度可以达到3 mm,可实现精准避障。
基本工作原理:主控制器向控制端引脚发送一个高电平脉冲信号,控制端自动发送声波。声波遇到障碍后,会反射回到接收端,接收端一检测到有信号返回,就输出一个高电平脉冲[11]。高电平脉冲的时间是声波信号发射到障碍物,再由障碍物反射回来的时间,通过计算公式(高电平脉冲时间×波速)/2,得到离障碍物的距离。
2.3称重传感器模块
称重传感器是把物料的重量信号转变成电平信号的转换设备。物料的重量测量采用HX711称重传感器模块,该模块的HX711芯片是一款具有高精度测量的24位A/D转换器芯片。该芯片具有电路集成度高、响应速度快、抗干扰性强等优点。
基本工作原理:当物料放在称重传感器上,经过HX711芯片收集物料重量的信号并进行处理及AD转换。HX711芯片与主控制器的通讯只需要两个引脚,时钟引脚PD_SCK和数据引脚DOUT。时钟引脚PD_SCK是用来选择输入增益和通道,数据引脚DOUT是用来输出数据[12]。
2.4电机驱动模块电路
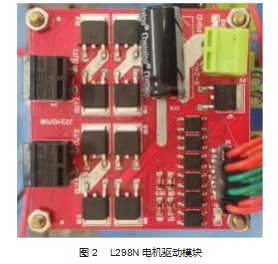
机器人采用4个直流减速电机驱动机器人的前进后退及转弯,轮子呈对称分布,使结构简单合理,受力均匀,该结构让机器人在运输过程中十分稳定,便于机器人的前后移动和转弯。直流减速电机驱动控制选用L298N电机驱动模块,该模块采用双H桥驱动芯片L298N,具有驱动能力强,能够同时驱动两个直流减速电机,其驱动电流大、抗干扰能力强、发热量低、稳定性好[13-15]。如图2所示。
2.5稳压电路
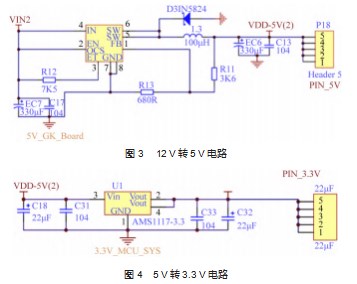
稳压电路的作用是使电源电路的输出电压稳定,使各模块能更好的正常工作。机器人采用可充电8 A12 V锂电池供电,如图3所示,12 V电源经过AS1015芯片转化为5 V电压。如图4所示,5 V电压经过AMS117芯片转化为3.3 V电压。5 V和3.3 V电压作为电源为机器人系统各个模块供电,确保各模块能得到充分的供电并且还有稳定性好,性能性高,安全性好等优点。
3运输机器人系统软件设计
系统软件程序的设计是在编程软件KeilμVision上编写的,是智能运输机器人控制系统设计的核心,系统程序设计分为8个子任务:第1个任务是自主规划路线,这任务贯穿整个运输流程且是整个运输流程中最关键的一步;第2个任务是用称重传感器模块测量出物料的重量;第3个任务是把称重传感器模块测得的重量显示在显示屏上;第4个任务是识别二维码,运货时,正确识别物料二维码,自动打开相应的物料仓门,取货时与运货时一样;第5个任务是避障,做到精准避障,避免物品损坏,而且提高在运输过程中的安全性;第6个任务是识别交通灯,这是由树莓派与摄像头互相配合完成的;第7个任务是语言播报,根据树莓派所给的控制信号,通过喇叭来播报;第8个任务是控制电机转速,通过控制电机同速或差速,来实现机器人前后移动和转弯。
4机器人的系统集成及测试
4.1控制系统总流程
系统上电,运行程序,经行初始化。初始化完成后经行命令等待,由摄像头识别二维码,将识别的信息送到树莓派,树莓派控制语音播报。主控制板控制仓门以剪刀式的打开,接着放进物料,称重传感器把测量得到的数据,通过引脚与主控制器进行通信,树莓派在控制音响把测得的物料重量进行语音播报,并且在显示屏显示出来。之后主控制板控制仓门做出关门动作和控制电机转动行驶到指定的目的地。在行驶过程中,超声波模块将判断障碍物的距离并把相关的信息发送给主控制板,控制电机转动使机器人精准躲避障碍物。摄像头将识别交通灯的信息发送给树莓派,并在相应的区域等待交通灯。到达指定的收货区域后,进行语音播报,提示出示取货码,识别取货码,若取货码正确则控制相应的仓门打开,取出物料。最后通过主控制板控制电机自主规划路线回到起始区域。如图5所示。
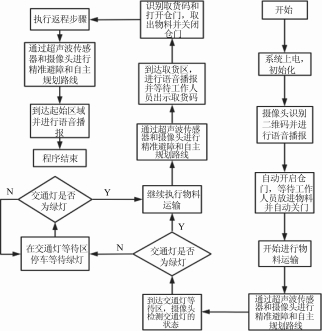 图 5 运输机器人运输流程
图 5 运输机器人运输流程
4.2机器人的测试
系统功能测试如下:(1)检查系统软件和硬件是否连接准确;(2)检查称重的重量是否能语音读出来和显示在显示器上;(3)检查是否实现前进,后退及转弯;(4)检查是否能自主规划路线;(5)检查是否能精准避开障碍物;(6)检查识别交通灯是否正确;(7)检查是否能识别二维码;(8)检查是否发出正确语音播报;(9)检查是否正确打开相应的仓门。
把机器人的每部分零件拼装成整体好后,放进模拟场地里测试。在测试过程中,机器人可以把称重传感器测量得到的重量,通过音响播报出来,而且还能在显示器上显示出准确的重量数字,准确地发出相应的语音提示和自动开启相应的仓门,能自主规划路线,精准避开障碍物,能够正确识别二维码以及交通灯。当到达固定的取货区域时,随后发出对应的语音提示,提醒工作人员出示取货码,识别取货码后,取出物料后并自主规划路线返回起始区域。
5结束语
本文以零件加工生产车间运输环境为研究对象,针对现有零件加工生产车间采用手动推车运输和半自动化运输器械等人工成本较高、运输效率低下、费时耗力等不足和缺点,设计了基于嵌入式的零件加工生产车间智能运输机器人,使用自动化和智能化的操作,有效解决了手动推车运输和半自动化运输器械等劳动强度高、生产成本高、消耗时间长、运输效率低等问题,并从结构、控制、性能、经济性、实用性等方面论证了智能运输机器人的可行性。本文设计开发的智能运输机器人具备较高的运输效率,实现了人工智能技术与零件加工生产车间的有效集成,可以有效提高零件加工生产车间的生产效率。
参考文献:
[1]张瑞杰,何舟,施威杰.基于Petri网的车间物料配送及路径规划方法[J].现代制造工程,2021(6):17-24.
[2]张玉,朱墨,尹世琛,等.索道装配线车间整体布局规划设计[J].起重运输机械,2017(7):83-88.
[3]宁金新.T机械公司机加工车间生产系统仿真优化研究[D].石家庄:河北科技大学,2020.
[4]郝力文,王子文.车间运输小车的智能控制[J].机械,2001(S1):150-151.
[5]徐广明,杨伟红,刘克铭.基于PLC的车间运输小车的自动控制系统设计[J].世界科技研究与发展,2009,31(4):663-665.
[6]廖广益.基于STC单片机直流电机PWM调速[J].商业故事,2018(23):98.
[7]黄金鹏,尚俊娜,岳克强.基于ARM与MPU6050的测姿系统设计[J].传感器与微系统,2018,37(4):101-103.
[8]赵龙.陀螺仪辅助电磁定位系统的研究[D].北京:北方工业大学,2017.
[9]黄嘉兴.基于STM32的两轮平衡机器人设计[D].广州:广东工业大学,2019.
[10]张克声,隆昌喜.基于HC-SR04模块的时差法声速测量[J].机械与电子,2018,36(2):54-57.
[11]胡林林,付龙.基于STC89C52单片机的超声波测距设计[J].仪表技术,2018(2):33-35.
[12]王航.基于嵌入式机器视觉的干电池回收系统设计[D].秦皇岛:燕山大学,2018.
[13]李怀宇.基于STM32的避障小车设计[J].科技视界,2018(30):191-193.
[14]董邵万,郭锐.机器人驱动模块L298N[J].数码世界,2018(7):79-80.
[15]张敏丽,郭红壮,于源华.基于PID算法的语音智能小车设计[J].科技风,2020(23):23-24.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45768.html