SCI论文(www.lunwensci.com):
摘要:针对特定区域行驶的具有自动驾驶功能的观光车, 结合自动驾驶上位机控制系统, 设计一种基于嵌入式技术的自动驾驶观 光车底盘控制系统。该控制系统在上位机的控制下能控制观光车的油门、制动、转向系统; 通过模拟油门踏板位置传感器信号、 在原车制动踏板上加装推杆电机、切断原车挡位控制信号由嵌入式控制器模拟挡位信号的方式对原车的油门、制动、挡位系统 进行自动化改造。结果表明: 利用该系统输出的油门模拟信号能控制观光车的行驶速度, 其输出模拟信号与理论信号的误差仅 为-0.847%; 该系统控制精度高且响应速度快, 具有一定的应用和推广价值。
关键词:无人观光车; 上位机; 嵌入式控制器; 底盘控制
Design of Embedded Control System for Unmanned Sightseeing Car Chassis
Abstract: Combined with the automatic driving principal computer control system, a self driving sightseeing car chassis control system was designed based on embedded technology for sightseeing car chassis with automatic driving function in a specific area . The system can be use to control the throttle, brake and steering system of sightseeing car under the control of the principal computer; through simulating the signal of accelerator pedal position sensor, adding push rod motor on the brake pedal of the original vehicle, cutting off the gear control signal of the original vehicle and simulating the gear signal by the embedded controller, the automatic transformations of the accelerator, brake and gear system of the original vehicle were carried out. The results show that by using the throttle analog signal output by the system, the driving speed of the sightseeing vehicle can be controlled, and the deviation between the analog throttle signal and the theoretical output is only -0.847%; the system has high control precision and fast response speed, which has certain application and promotion value.
Key words: unmanned sightseeing car; principal computer; embedded controller; chassis control
0 引言
自动驾驶技术是汽车领域的新技术, 根据国家推荐标 准《汽车驾驶自动化分级》, 将汽车自动驾驶划分为0 级到 5 级, 各量产车型的车道保持、自适应巡航、主动安全等 ADAS 系统属于1 级, 而部分车型在某些特定的场景, 如高 速公路等环境下可实现汽车自动驾驶功能, 属于 2 级自动 驾驶。要实现真正无人驾驶的4 级、5 级自动驾驶还有一定的难度,但在一些交通环境单一、行驶路线固定的特定区 域, 如景区、园区、码头等场所开展自动驾驶车辆布置, 对自动驾驶技术的研究和发展有一定的促进作用[1-2]。
车辆的自动驾驶主要由传感器模块、定位模块、轨 迹规划模块、决策控制模块、底盘线控模块等部分组 成[3]。其中底盘线控模块属于执行器, 其控制精度和线 控化程度直接决定自动驾驶系统的性能。罗宁延[4] 提出 智能汽车线控系统主要由油门、转向、制动、换挡 4 个 子系统组成。袁政等[5] 提出增加转向电控驱动机构、油 门信号切换模块、副踏板制动装置的方式对原车的底盘进行自动化改造。本文以特定区域行驶的无人观光车为 研究对象, 设计一种用于无人观光车自动驾驶的底盘嵌 入式控制板, 对现有观光车进行自动驾驶功能改造。
1 观光车底盘结构
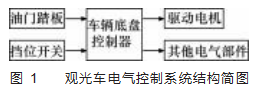
选用某 8 座观光车 (型号 GVG6/48AC) 为载体进行 自动驾驶功能改造与升级, 车辆采用后轮双三相异步交 流电机驱动、前轮机械液压转向, 制动方式为液压后轮鼓刹, 挡位控制为机械三挡船形开关换挡控制。该观光车电气系统基本结构如图 1 所示。
该观光车驱动速度控制由油门踏板实现, 车辆的行驶方向由船形挡位开关实现, 车辆的制动和转向系统为机械系统部件。
2 底盘嵌入式控制系统
2.1 观光车挡位控制
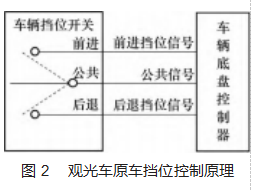
如图 2 所示, 观光车的原车挡位控制通过单刀双掷的船形开关进行切换, 开关与车辆底盘控制器相连, 公共端一般为地信号, 当开关打向前进挡位时前进信号线为低电平, 另一个后退信号则为高电平。而当开关处于后退挡位时后退挡位信号为低电平, 另一个前进挡位信号则为高电平。
车辆控制模块各挡位信号电平状态与车辆行驶状态 的对应关系如表 1 所示。
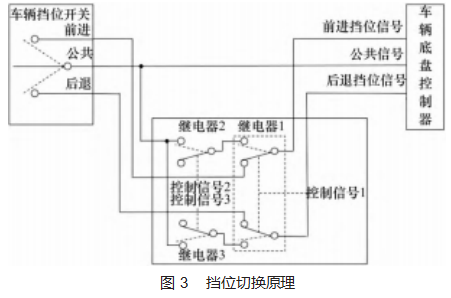
通过上述分析, 车辆在进入自动驾驶模式后, 由自动驾驶控制上位机对车辆前进方向进行控制, 断开原车 的挡位开关信号, 由底盘嵌入式控制系统控制继电器产 生挡位信号给底盘控制器, 其基本控制原理如图 3 所示。 在车辆挡位开关和底盘控制器之间接入继电器, 在底盘 嵌入式控制系统的控制下切换自动驾驶和人工驾驶模式 下的挡位信号。
2.2 观光车油门信号控制
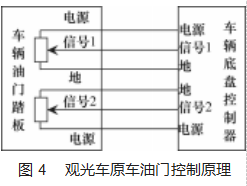
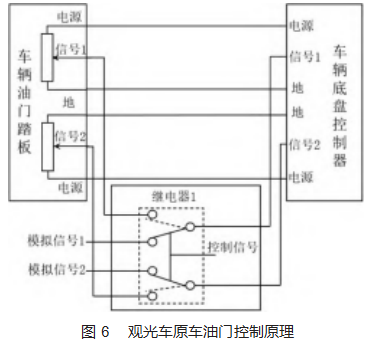
如图 4 所 示, 观 光 车的原车油门踏板与车 辆底盘控制器相连, 在 驾驶员的控制下为控制 器 提 供 车 速 控制意 图 。 油门踏板多采用冗余设 计, 提供两路信号给控制器, 在油门踏板传感器出现故障时, 可由另外一路传 感器为控制器提供信号。
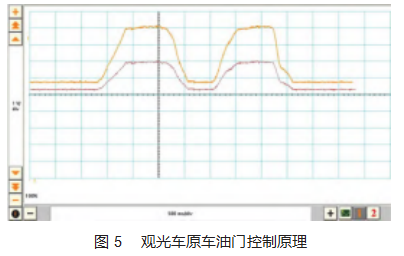
不同车型的油门踏板传感器的输出信号类型有所区别。典型的传感器输出信号如图 5 所示为双感应式, 传感器 App1 输出的信号范围约为 0.8~4.5 V, 传感器 App2 输出的信号范围约为 0.4~2.3 V, 从信号输出看, 两路传 感器信号为 1/2 的关系。
通过上述分析, 可知车辆在进入自动驾驶模式后, 由底盘嵌入式控制系统切断原车油门踏板信号输出, 然 后输出油门控制信号给车辆底盘控制器, 其基本控制原 理如图 6 所示。
2.3 观光车制动及转向控制
通过加装电动转向器的方式对该观光车底盘转向系 统进行改进与升级, 转向器通过 CAN 通信接口直接与自 动驾驶上位机相连。制动的自动驾驶控制通过在原车制 动踏板安装推杆电机的方式实现, 推杆电机受底盘嵌入 式控制系统控制。
2.4 底盘嵌入式控制系统
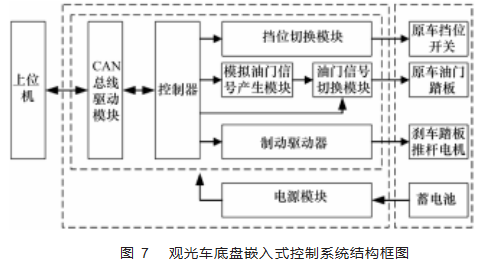
通过分析上述目标观光车底盘结构, 结合自动驾驶 控制上位机控制要求, 设计出如图 7 所示的观光车底盘 嵌入式控制系统的结构框图, 车辆转向系统的转向电机 由自动驾驶上位机单独控制。底盘嵌入式控制系统由控制 器、 CAN 总线驱动模块、挡位切换模块、模拟油门信号 产生模块、油门信号切换模块、制动驱动器等模块组成。
由挡位切换模块对原车的挡位开关信号进行切断处理, 再由电路输出挡位信号给车辆的底盘控制器, 从而实现对车辆前进和后退的控制。
油门信号切换模块切断原车的油门踏板信号后, 再由底盘嵌入式控制系统模拟相应的油门信号给车辆的驱 动控制系统, 通过油门信号切换模块切换车辆自身油门信号和控制系统模拟油门信号。
制动驱动器在控制器的控制下, 对原车制动系统加装的制动踏板推杆电机进行伸缩控制, 从而实现车辆的 制动控制。
3 系统硬件设计
3.1 油门信号产生及切换模块
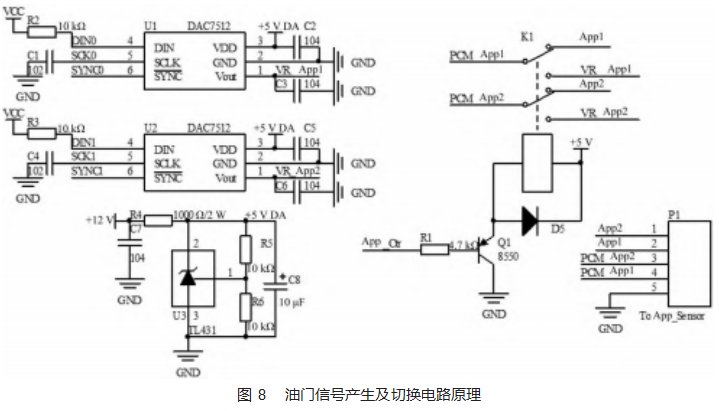
车辆底盘嵌入式控制系统的模拟油门信号产生模块和油门信号切换模块如图 8 所示。通过 2 个 DA 转换器产 生两路油门模拟信号, 两路信号之间的关系如图 5 所示。 由 TL431 构成的 5 V 精密稳压电源为 DA 转换器提供基准 电压, 以提高 DA 转换电路模拟输出电压的精度[9- 10]。
图 8 的切换原理: 油门信号切换模块通过继电器对 原车油门踏板信号和模拟油门踏板信号进行切换。继电 器的公共触点通过信号接口 P1 与原车辆的底盘控制器相 连, 常闭触点与原车辆的油门踏板输出信号相连, 在信 号切换电路发生故障的情况下, 车辆底盘控制器也能接 收到油门踏板的信号, 能提高系统的安全性。继电器的 常开触点与模拟油门信号产生模块中 DA 转换器的模拟 电压输出电路相连, 在自动驾驶模式时, 将 DA 转换器 产生的模拟油门信号输出给原车的底盘控制器, 对车辆的行驶速度进行控制。
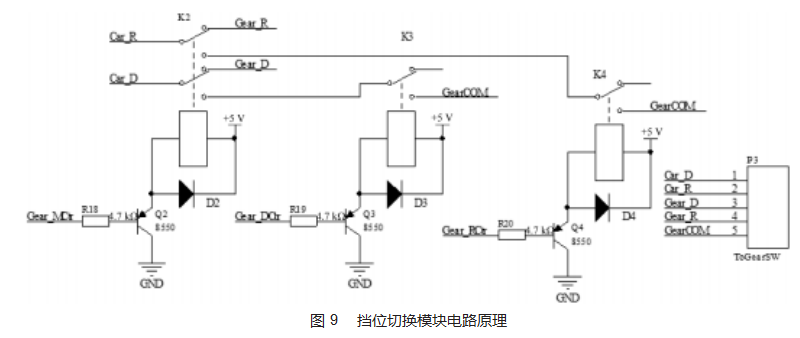
3.2 挡位切换模块
车辆底盘嵌入式控制系统的挡位切换模块如图 9 所 示。挡位切换模块通过 3 个继电器对原车挡位开关的信 号进行切换和控制。原车的挡位开关与继电器的常闭触 点相连, 确保在系统故障的情况下, 原车底盘控制器也能接收到挡位信号。车辆进入自动驾驶模式时, 继电器 K2 工作, 断开原车挡位开关与底盘控制器的连接, 继电 器 K3 或者 K4 工作, 车辆底盘控制器的前进或者后退信 号线与公共端相连, 车辆进入前进或者后退模式。
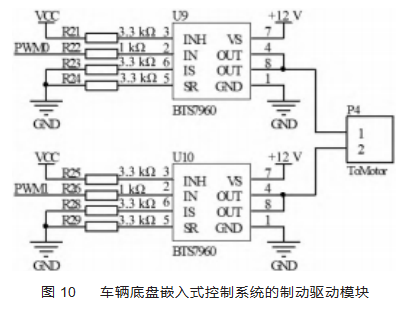
3.3 制动驱动器模块
车辆底盘嵌入式控制系统的制动驱动模块如图 10 所 示。制动驱动模块采用 2 个半桥驱动器构成全桥驱动器。 驱动制动踏板的推杆电机在主控制器的 PWM0 和PWM1 的控制下可实现变速伸缩运动, 以实现不同力度的制动。
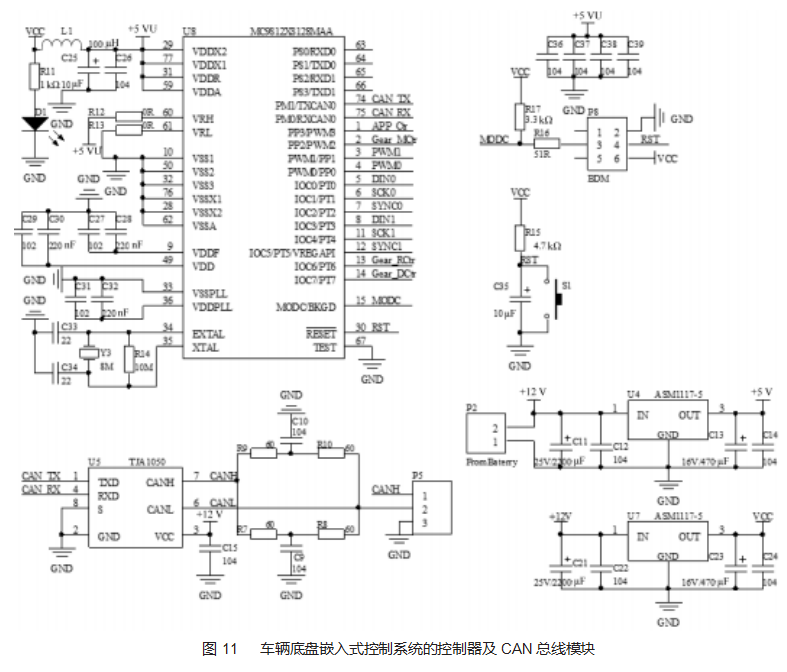
3.4 控制器及CAN 总线驱动模块
车辆底盘嵌入式控制系统的控制器及 CAN 总线模 块如图 11 所示, 电路主要由控制器及外围电路、 CAN总线驱动模块、调试接口、复位电路、两路 5 V 电源模 块 组 成 。 控 制 器 采 用 车 规 级 飞 思 卡 尔 单 片 机, 自 带 CAN 总线接口。 CAN 总线驱动模块选用 TJA1050 驱动 器, 在提高总线驱动能力的同时, 提高了电路的抗干扰 能力[11- 12]。
4 系统软件设计
所设计的自动驾驶观光车的转向、油门、制动的控 制, 通过利用上位机通过 CAN 总线向电动转向器、底盘 嵌入式控制系统发送控制命令实现。
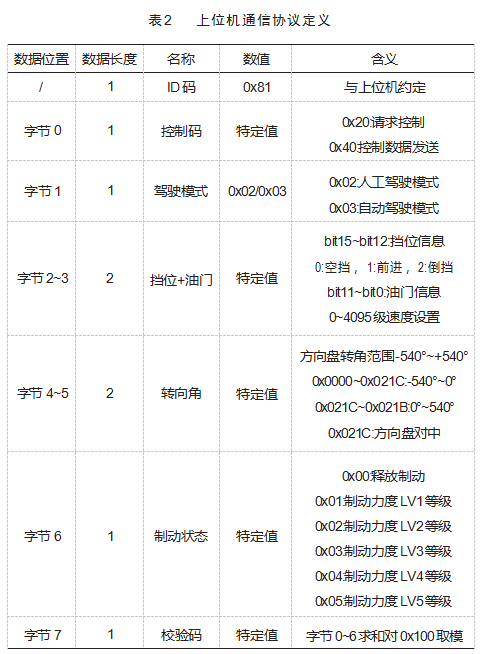
自动驾驶模式下数据包由 1 个字节的 ID 码、 1 个字 节的控制码、 1 个字节的驾驶模式、 2 个字节的油门和挡 位状态、 2 个字节的转向角、 1 个字节的制动状态共 7 个 字节数据组成, 其格式和含义如表 2 所示。
5 试验分析
为验证底盘嵌入式控制系统的可靠性和稳定性, 开 展了试验研究与分析。将制作后的嵌入式控制系统应用 于某 8 座观光车 (型号 GVG6/48AC), 底盘嵌入式控制系 统及测试环境搭建如图 12 所示。根据表 2 所示的通信协 议向底盘嵌入式控制板发送测试数据帧: 40 03 17 D0 02 1C 00 48 (数据释义: 自动驾驶模式, 前进挡, 速度等 级 2000, 方向盘对中), 底盘嵌入式控制系统回复数据 如图 13 所示。
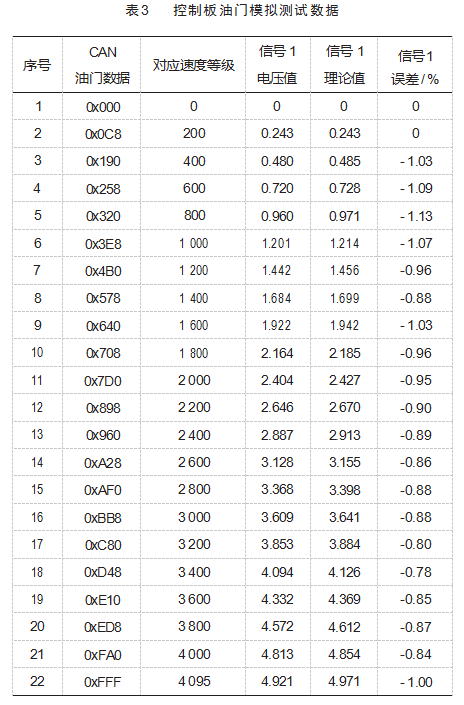
通过 CAN 卡向底盘嵌入式控制系统发送 0~4 095 等 级油门控制信号, 测试数据按 200 的等级进行递增, 分 别测试在不同等级下对应的电压值 (测试系统电路电源电压为 4.971 V), 与理论值进行比较并计算出信号误差, 结果如表 3 所示。
从试验结果来看, 底盘嵌入式控制系统输出的油门 模拟信号平均偏差为-0.847%, 产生偏差的原因为程序 进行 DA 转换时基准电压使用电源电压 5 V 进行的, 而试 验过程中 DA 的基准电源电压为 4.971 V, 与理论值原本 就存在-0.58% 的偏差, 去除电源电压误差值后系统输出 油门模拟信号与理论值十分接近。
6 结束语
底盘嵌入式控制系统是自动驾驶汽车上位机控制与 汽车底盘连接的重要设备, 在现阶段自动驾驶车辆没有 规模化和产业化的情况下, 无论是乘用车还是本文研究 的观光车, 在实现自动驾驶的过程中都离不开底盘线控 系统。针对特定区域行驶的观光车底盘, 采用嵌入式技 术设计了一种底盘线控系统, 通过在原车转向机构中增 加转向器、在原车油门信号中增加信号切换模块、在原 车制动机构中增加推杆电机的方式, 实现对原车油门、 制动机构、转向机构的自动化控制。结果表明: 该系统 在电源基准有偏差的情况下输出的油门信号与理论值的 平均偏差仅为-0.847%, 符合系统要求。
参考文献:
[1] 蒋拯民, 党少博,李慧云,等 . 自动驾驶汽车场景测试研究进展 综述[J]. 汽车技术,2022(8):10-22.
[2] 彭育辉, 江铭,马中原,等 . 汽车自动驾驶关键技术研究进展[J]. 福州大学学报(自然科学版),2021,49(5):691-703.
[3] 王博,黄国潮,王征 . 无人快速综合道路检测车系统设计[J]. 汽 车实用技术,2022,47(14):17-20.
[4] 罗宁延 . 智能网联背景下汽车底盘线控子系统及其集成的综 述[J]. 汽车实用技术,2021,46(4):14- 17.
[5] 袁政,米承继,刘洲,等 . 自动驾驶矿卡底盘线控改装设计研究 [J]. 汽车实用技术,2021,46(12):14- 18.
[6] 唐政,余越,刘羽飞,等 . 田间作物表型获取无人车平台主体结 构设计与优化[J/OL]. 浙江大学学报(农业与生命科学版):1- 13 [2022-06- 14].
[7] 刘婷婷,郭佩佩, 高翔,等 . 基于北斗-RTK 的农用无人车设计与实现[J]. 现代农业装备,2022,43(1):30-37.
[8] 白阳,韩斌, 欧阳光 . 基于移动互联网络的园区智能无人驾驶 系统[J]. 中国电子科学研究院学报,2022,17(1):50-56.
[9] 冯宇航,任勇峰,刘东海 . 基于 FPGA 的多路信号源的设计与实 现[J]. 电子测量技术,2021,44(11):136- 140.
[10] 张雪钰,王洪凯, 焦新泉,等 . 基于 AD5504 的多路信号源的设 计与实现[J]. 电子器件,2021,44(2):290-294.
[11] 张海春,姜荣帅,鲁赵骏,等 . 车内控制器局域网总线安全评估 机制研究[J]. 华中科技大学学报(自然科学版),2022,50(1):1-6.
[12] 李超超,武恪,方菱 . 基于 AUTOSAR 的 CAN 通信栈设计[J]. 电 子测量技术,2021,44(23):139- 145.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63394.html