SCI论文(www.lunwensci.com)
摘要:为解决在未知物流环境下四旋翼无人机无法自主避障精准配送的问题, 以四旋翼无人机为平台, 使用树莓派 4B 为机载计算 机处理 SLAM 激光雷达的建图和计算路径规划信息, 结合 Hector_SLAM 算法, 并融合飞控数据对无人机状态估计进行修正, 实现四 旋翼无人机的高精度定点悬停和自主避障, 提高无人机在室内物流环境下的自主飞行性能。实验表明: 无人机能够实现室内未知 物流环境下的自主飞行及精准避障。并且可以实现四旋翼无人机的一键起飞, 精确悬停等功能。最后, 对算法的定位精度与基于 RBPF 的 SLAM 算法进行了分析。实验结果表明, 相较于 RBPF 算法, 所提方法在相同计算平台上具有更高的精度, 对于在所处未 知环境下较低成本的精准物流有良好的借鉴意义。
Design of Autonomous Obstacle Avoidance Logistics UAV System Based on SLAM
Liu Zelin, Zhang Yuanyuan, Yang Wangsi, Lu Xinyuan, Gu Jiacheng, Chen Junyi
(School of Automotive and Rail Transit, Nanjing Institute of Technology, Nanjing 211167. China)
Abstract: To solve the problem of UAV's autonomous obstacle avoidance and accurate distribution in an unknown logistics environment, a quadrotor UAV is used as a platform and a Raspberry Pi 4B as an airborne computer to process the mapping and path planning information of the lidar, combined with Hector_SLAM algorithms and flight control data to correct the UAV state estimation, so as to realize the high- precision fixed-point hovering and autonomous obstacle avoidance of the quadrotor UAV, and improve the autonomous flight performance of the UAV in the indoor logistics environment. Experiments show that UAVs can achieve autonomous and precise flight in an unknown indoor logistics environment, as well as accurate obstacle avoidance flight, and realize functions such as one-key take-off and precise hovering of the UAV. At last, the positioning accuracy of the algorithm and the SLAM algorithm based on RBPF are analyzed . Results show that compared with RBPF algorithm, the proposed method has higher accuracy on the same computing platform, and has a good reference for low-cost precision logistics in the unknown environment.
Key words: path planning; SLAM; autonomous obstacle avoidance; logistics UAV
0 引言
目前, 物流行业的蓬勃发展推动了物流配送方式的 持续性变革。随着无人机技术的成熟, 无人机配送已成 为近几年工业界和学术界共同关注的热点[1]。在 2013 年 Amazon 首次提出无人机配送的概念后, 国内外各配送平 台, 物流运输公司, 科研院所都在加大对于无人机配送 方向的研究力度。
无人机物流是利用无人机为载体将运输品准时、准 确、安全地运送到目的地的过程, 其步骤包括构建无人 机的飞行环境并进行自主定位, 以及在场景中进行路径 规划[2]。
无人机在未知环境内运动需进行自主定位。同时 定 位 与 制 图 (Simultaneous Localization and Mapping, SLAM ) [3] 应运而生。 SLAM 指机器人从未知环境的未知 地点出发, 在运动过程中通过重复观测到的环境特征定位自身位置和姿态, 再根据自身位置构建周围环境的增 量式地图, 从而达到同时定位和地图构建的目的[4]。
无人机路径规划 (Path Planning) 是无人机执行任务 的基础,其目的是在特定环境下规划起始位置和目标位置 之间避开障碍物的最优路径[5]。近年来, 越来越多的研究 者结合低空环境、运用多种算法对此进行了研究,常用的 算法包括图搜索算法、运筹学线性规划方法、传统/改进 的智能优化算法以及机器学习算法等[6-9]。但多限于已知 环境的提前规划, 未能在未知环境下实现自主避障飞行。
为解决于无人机在未知环境下无法完成自主避障飞 行这一问题, 使无人机物流的最后一环——精准物流成 为现实, 本文提出一种基于 SLAM 的, 可自主避障进行 路径规划的物流无人机系统设计方案, 能够在未知环境 下完成无人机的自主飞行, 为无人机的精准物流配送提 供方案参考。
1 整体方案设计
1.1 硬件系统架构
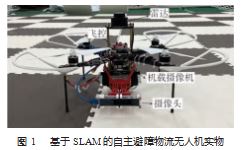
所设计的无人机硬件系统包括: 机载计算机 Rasp⁃ berry Pi 4B ( 8GB 版)、激光雷达、 MSP-EXP432P401R 核 心板为主控的 TI LaunchPad 飞行控制器、无刷电机和供 电等多种模块。
实现方案为: 激光雷达扫描后将位置信息和环境信 息发送给机载计算机, 由机载计算机处理后发送给飞控, 飞控收到机载计算机后对无人机的姿态和位置进行控制。 图 1 所示为基于 SLAM 的自主避障物流无人机实物图。
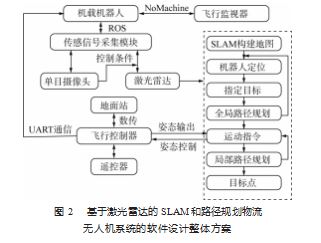
1.2 软件系统架构
软件部分包含机载计算机 Raspberry Pi 4B 与飞控 TI LaunchPad 间的通信, 单目视觉摄像头、激光雷达等传 感器数据的采集, 各传感器信息源的坐标转换和位置估 计、路径规划的实现。图 2 所示为基于激光雷达的 SLAM 和路径规划物流无人机系统的软件设计整体方案。
2 自主飞行控制算法设计
无人机在创建好的环境地图中定位可以减少对计算 资源消耗并提升机体定位精度, 地图还可以辅助确定探 测目标物的空间范围并构建对目标物范围估计结果的 评测。
在未知环境中控制机器人进行探索并实现室内二维 地图的构建。需要在前端利用激光雷达构建栅格地图, 后端的导航框架将前端 SLAM 提供的地图根据无人机的 半径转换为权重地图, 再使用全局路径规划算法和局部路径规划算法规划出无人机的移动路径。从而使四旋翼 无人机在未知环境下做到探索并绘制环境二维地图, 在 已知地图的基础上, 实现到指定目标点的自主避障导航。
2 . 1 SLAM 算法
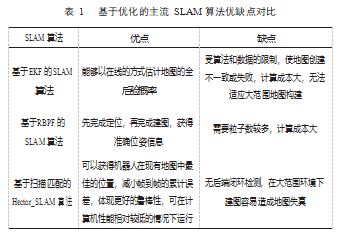
基于优化的主流 SLAM 算法主要有以下 3 个: 基于 EKF (Extended Kalman Filter) 的 SLAM算法; 基于 RB ⁃ PF ( Rao-Blackwellized Particle Filter) 的 SLAM算法; 基 于扫描匹配的 Hector_SLAM 算法。 3 种方法的优缺点如 表 1 所示。
由表 1 可知 Hector_SLAM 不依赖里程计, 在状态估 计上利用 IMU 解决激光的运动畸变问题, 在扫描匹配上 使用非线性优化-高斯牛顿法获得最优匹配, 并且在栅 格地图的构建上使用多分辨率地图避免局部极小值, 对 环境适应能力强[10]。
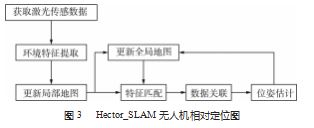
通过 Hector_SLAM 实现无人机相对定位的具体流程 如图 3 所示。
在得到激光雷达扫描的目标三维信息后, 与已经构 建的环境地图相匹配, 实现机器人的位姿估计。再使用 Gauss_Newton 法实现对机器人位姿的校正和占用栅格地 图的构建[11], 计算过程如下。
设定地图模型为栅格地图, 同时通过扫描匹配进行 定位。其原理是利用最小二乘法求解最优机器人位姿 ς i, 如式 (1) 所示:
式中 Si ( ς i )如式 (2) 所示, 表示雷达坐标系下激光扫描
对坐标为 Si ( ς i + Δςi ) 的栅格地图值 M( Si ( ς i + Δςi )在Δςi 处进行一阶泰勒展开并对 Δςi 求导、取 0 值, 并通过 双线性插值法可推出栅格地图中一点 Pm ( x, y ) 和其临近 的 4 个单位栅格 P00 - 11 的几何关系, 可求出 Pm 的栅格地图占用值 M( Pm ), 如式 (3) 所示:
实际求解时, 将Pm 替换成Si ( ς i )可求得 ς i 的最优估计。
2.2 传感器坐标系间变换
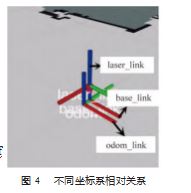
机器人的每一个关节都需要坐标转换来进行整体维 护, 需要统一的坐标系统, 以确定每两个部件 (比如无 人机机体和 SLAM 激光雷达) 之间的关系。将 map (地 图坐标系, 提供长期时间下全局精准坐标, 通过各传感器信息源不断计算更新[12] ) 作为父节点, 即参考系, 得到了 odom (里程计坐标系,其方向不随机器人运动而改变, 但位置随无人机运动 会 出 现 累 积 误 差 漂 移,提 供 短 期 局 域 精 确 坐 标)相对地图的位移, 并发布给其他订阅者使用。使用图形化工具 ROS-rviz 中的 tf组件, 可得不同坐标系之间相对关系, 如图 4 所示。
2.3 路径规划
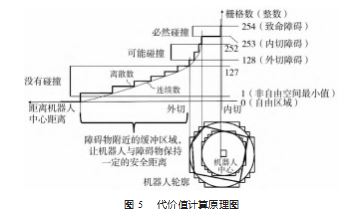
路径规划是指当空间中存在障碍物时, 为移动机 器人规划一条期望路径能避障且能最快到达指定的地 点。路径规划依赖于地图, 在 SLAM 构建的静态地图 上添加一些辅助信息 (比如实时获取的障碍物数据, 基于静态地图添加的膨胀区等数据), 组成代价地图。 代价地图 (costmap) 是指机器人通过激光雷达信息建 立和更新的二维环境地图。代价地图中每个单元中可 以有 255 个不同的代价值, 它采用的底层机构表示三 个: 占 用 、空 闲 、位 置 。代 价 值 的 计 算 如 图 5 所 示, 横轴是距离机器人中心的距离, 纵轴是代价地图中栅 格的灰度值。
路径规划[13- 14] 主要由下面的两大规划器组成。
全局路径规划 (global_planner): 根据给定的目标位 置和全局地图进行总体的路径规划。在导航中, 使用 A* 算法[15- 16] 进行全局路径的规划, 在进行启发式搜索提高 算法效率的同时, 可以基于评估函数保证找到一条最优 路径。
本地路径规划 (local_planner): 实际情况下, 由于 可能出现障碍物, 无法完美按照全局路径规划。本地实 施规划由 local_planner 模块实现, 使用Dynamic Window Approaches 算法[17] 搜索躲避障碍物行进的多条路径, 综 合评价标准 (是否撞击障碍物, 所需的时间) 选取最优 路径[18], 并且计算行驶周期内的线速度和角速度, 避免 与动态的障碍物发生碰撞。
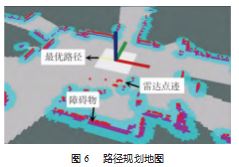
得到的地图有 global_costmap (全局代价地图) 和 lo⁃ cal_costmap (本地代价地图), 前者用于全局路径规划, 后者用于本地路径规划。如图 6 路径规划地图所示, 整 体为全局代价地图, 中间白色方块为局部代价地图, 红 色点迹为雷达扫描数据, 黄色曲线为通过路径规划算法 规划出的到目标点的最优路径, 紫色曲线为算法计算得 出的障碍物。
3 实验测试结果与分析
为验证并对比基于扫描匹配的 Hector_SLAM 算法与 基于 RBPF 的 SLAM 算法在此无人机平台上运用路径规划 进行自主避障及利用 SLAM 进行空间定位的能力, 设计 如下测试方案。
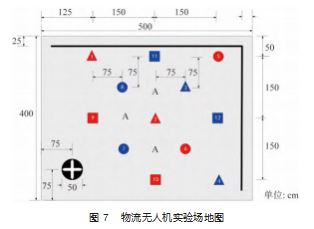
在如图 7 所示的 500 cm×400 cm 的试验场地中, 无人 机根据输入的目标位置信息, 对指定位置的目标地点完 成送货作业。无人机上安装有一可升降吊舱, 吊舱质量 50±5 g, 升降范围 60±10 cm; 起飞、飞行过程中, 巡航 高度 150±10 cm, 吊舱紧贴无人机机腹; 到达目标地点 上方, 无人机下降悬停, 并将吊舱降至距离地面 20±5 cm 高度。送货操作完成后恢复到巡航高度飞行。送货作 业途中无人机自行通过路径规划穿过或绕过 A 区附近随 机放置离地 1.5 m 高度的呼啦圈。无人机安装垂直向下的 激光笔, 用以标识航迹。无人机在指定目标上送货悬停 可反映其空间定位能力, 能否穿过随意位置、方向的呼 啦圈, 可判断无人机的自主避障能力。
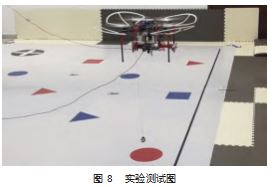
由表 2~3 可知, 无人机运用基于 RBPF 的 SLAM 算法 相较基于扫描匹配的 Hector_SLAM 算法, 对自身位置感 知有较大误差, 不能进行成功穿环, 并且在实验中发现 其定点悬停较不稳定, 激光笔的投影光斑活动较多。使用基于扫描匹配的 Hector_SLAM 算法的方案, 悬停稳定, 并且能准确移动到指定目标上, 并精准返航, 如图 8 所 示。返航误差小于 3 cm, 在移动过程中考虑到无人机平 台搭建的动力学因素, 误差依旧始终保持在 7 cm 以内, 故得出所设计的物流无人机空间定位较为精准的结论。 而 3 次穿过随意位置、方向的呼啦圈, 可反映本设计系 统能自主识别每次更改的障碍物位置, 并进行准确性高、 避障性能优的路径规划功能。
4 结束语
本文设计构建了一套基于 SLAM 激光雷达, 可以自 主定位、路径规划并进行实时避障的四旋翼物流配送无 人机。同时基于 Hector_SLAM 和 A*算法的路径规划完善 了四旋翼物流无人机的飞行算法, 选用栅格地图作为 SLAM 与路径规划的地图表达模型, 并对栅格地图的构 图算法进行理论推导。可以实现自主定位的高精度、高 稳定性, 达到自主避障能力超过传统传感器和相同计算 能力下的其他 SLAM 模型的精准物流配送。并经过随机 指定障碍物位置, 模拟派送物品的实验测试了四旋翼物 流无人机的空间定位和自主避障能力, 结果表明所设计 的物流无人机空间定位较为精准、能自主识别随机摆放 的障碍物位置, 并进行准确性高、避障性能优的路径规 划, 对于未知环境下精准物流的配送方式有良好的借鉴 意义。
参考文献:
[1] 任璇,黄辉, 于少伟,等 . 车辆与无人机组合配送研究综述[J]. 控 制与决策,2021.36(10):2313-2327.
[2] 耿增显,程文亮,王子睿,等 . 物流无人机路径规划问题研究综 述[J]. 科技传播,2022.14(6):101- 104.
[3] 邸凯昌, 万文辉,赵红颖,等 . 视觉 SLAM 技术的进展与应用[J]. 测绘学报,2018.47(6):770-779.
[4] 刘文之 . 基于激光雷达的 SLAM 和路径规划算法研究与实现 [D]. 哈尔滨:哈尔滨工业大学,2018.
[5] 刘庆健,疏利生,刘刚,等 . 低空无人机路径规划算法综述[J]. 航 空工程进展,2021:1- 11.
[6] 刘君兰, 张文博,姬红兵,等 . 无人机集群路径规划算法研究综述[J].航天电子对抗,2022.38(1):9-12.
[7] RUZ J J, AREVALO O, CRUZ J M D L, et al. Using MILP for UAVs trajectory optimization under radar detection risk[C]// 2006 IEEE Conference on Emerging Technologies and Factory Automation, September 20-22. 2006. Prague, Czech Republic. New York: IEEE, 2020.
[8] 袁麟博,章卫国,李广文 . 一种基于遗传算法-模式搜索法的无 人机路径规划[J]. 弹箭与制报学报,2009.29(3):279-282.
[9] 牟治宇,张煜,范典,等 .基于深度强化学习的无人机数据采集 和路径规划研究[J].物联网学报,2020.4(3):42-51.
[10] KOHLBRECHER S, STRYK O V , MEYER J ,et al. A flexible and scalable SLAM system with full 3D motion estimation[C]// IEEE International Symposium on Safety, November 01-05. 2011. Kyoto, Japan. New York: IEEE, 2011: 155-160.
[11] 寿佳鑫,张志明,苏永清,等 .基于 ROS激光雷达的室内移动机 器人定位和导航系统设计与实现[J]. 机械与电子,2018.36 (11):76-80.
[12] 彭淦 . 多传感器信息源的无人机目标检测及定位研究[D]. 长 春:吉林大学,2022.
[13] 李晨辉,王泽峰,胡德燕,等 .移动机器人的路径规划技术研究[J].机电工程技术,2023.52(1):5-9.
[14] 杨向东,周汶锋,张陈宏,等 .基于无人机倾斜摄影的三维路径 规划[J].机电工程技术,2023.52(4):155-160.
[15] 潘世瑛 .基于改进 A~*算法的 AUV路径规划研究[J]. 装备制 造技术,2022(11):49-52.
[16] HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans⁃actions on Systems Science and Cybernetics, 1968. 4(2): 100- 107.
[17] GERKEY B P, KONOLIGE K. Planning and control in un⁃struc⁃ tured terrain[M]. ICRA Workshop on Path Planning on Cost⁃ maps,2008.
[18] 徐保来,管贻生,苏泽荣,等 . 改进动态窗口法的阿克曼移动机 器人局部路径规划器[J].机电工程技术,2016.45(9):21-26.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/64527.html