SCI论文(www.lunwensci.com):
摘要:文章设计了一种基于UWB技术的室内无线测距与定位实验教学系统,由固定基站、移动标签、滑台系统和控制终端四部分组成,其中实验平台主体用高精度丝杠滑台来控制定位标签的机械移动,其重复定位精度可达1um。其中详细论述了测距与定位原理以及系统软硬件设计,实验证明该平台测距精度最小可控制在±3cm,定位精度可达±5cm,满足目前高校相关课程实验教学要求,对科研以及教学工作具有很好的参考意义。
关键词:UWB;测距;定位;实验系统
本文引用格式:郭华,等.基于UWB的全自动测距与定位实验平台设计[J].教育现代化,2019,6(41):87-89,101.
一 引言
近年来,位置服务的相关技术和产业正在快速从室外转向室内,许多无线定位技术(如RFID、红外线技术等)得到了长足发展。这些技术弥补了GPS难以用于室内定位的缺点,但定位精度仍显不尽人意[1]。超宽带(Ultra-Wide Band,UWB)技术的出现改变了这一现状,极大提高了室内定位的精度,使得高校无线定位实验教学可以在实验室内进行[2,3]。然而现有的教学实验设备在一定程度上达不到所需要的自动化需求,甚至于需要手动卷尺测量验证,实验复杂效率低下,造成结果误差较大,往往达不到实验预期效果。因此,研究和设计自动化程度高、结构简单易于操作且适合高校实验室的实验验证系统是非常迫切和必要的。本文从UWB技术测距与定位原理出发,设计了一种自动化测距与定位实验平台,针对移动站标签运动精细度可测可控制,提出了一种可行的运载控制系统。平台实现方法简单,且适用于其他多种室内定位技术。
二 UWB测距定位原理
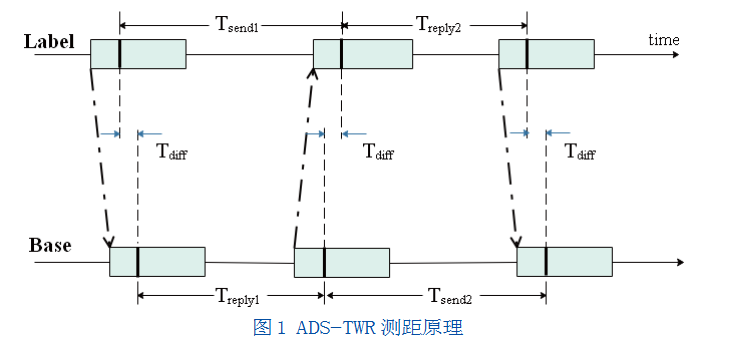
传统的测距技术分为单向测距技术和双向测距技术。TOF(Time of Flight,飞行时间测距)方法属于双向测距技术,它主要利用信号在两个异步收发机之间往返的飞行时间来测量节点间距离。实验系统采用基于TOF的非对称双边双向测距方法(Asymmetric Double Sided Two-Way Range,ADS-TWR)进行测距,不仅能有效消除时钟漂移带来的误差影响,使得测距精度得到保证,同时也利于实现测距定位的实时性[4]。
ADS-TWR测距原理如图1所示。
Label向Base发送消息请求帧并开始计时,Base接收到请求帧后开启计时,延时Treply1后向Label发送应答帧消息;Label接收到来自Base的应答帧消息后标注接收时间戳,将发送与接收的时间戳写入终止帧,经过Treply2延时后发送给Base,Base接收到终止帧消息后,记录接收时间戳,自此完成测距过程。Label 到 Base 之间信号传送的单程时间可用式 1.1.1 求得:
定位算法采用基于TOA的圆周定位算法,该方法的优点是计算量小、算法简单且定位精度相对较高。又因为UWB信号具有很高的时间分辨率,使得该算法十分适合应用在脉冲超宽带技术中[5]。其原理是将各个基站所在点作为圆心,测得的基站与标签距离做为半径作圆,这些圆就会相交于一点,这一点的坐标就是标签的估算坐标。TOA定位方法原理如图2所示。
其中B1,B2,B3为基站,M为移动站。假设其基站位置坐标分别是B1(x1,y1),B2(x2,y2),B3(x3,y3),移动站MS的坐标为(x,y),d1,d2,d3分别是基站与移动站之间的距离。解方程组(式1.2.1)便可得出移动站节点的坐标:
式1.2.2包含三个方程,2个未知数,属于超静定方程组,需利用非线性最小二乘法求解。根据3个基站的参数及几何位置建立误差函数,利用泰勒级数展开的方法进行近似计算使误差函数最小,从而可确定移动站的坐标位置。
三 实验平台硬件设计
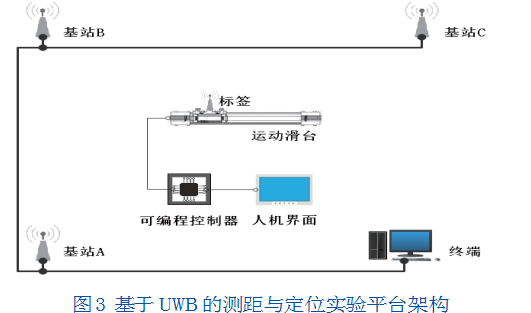
为了保证实验平台的机械运动精度,同时考虑到平台的简单易行易实现,移动站载体采用步进电机驱动滚珠丝杠滑轨,在可编程PLC控制器的控制下,操作者通过人机界面设置滑轨行进距离实现精准距离的测量与采集。系统总体结构如图3所示。
系统分为定位模块、运动滑轨、可编程控制器和人机操作端四大部分。定位模块选用DecaWave公司生产的DW1000芯片,包含多个基站和一个标签,由数据手册可知最远传输距离为450米,最小定位误差可控制在10cm以内。
运动滑轨部分由步进电机、步进电机驱动器以及螺杆滑轨组成。螺杆滑轨与电机转轴相连,电机驱动器通过产生一定的脉冲数来控制电机的转动速度,从而实现螺杆滑轨上的受控体的移动。可编程控制器采用三菱FX2N作为系统的控制器,产生脉冲信号发送给电机驱动,控制滑台的前进后退。通过步进细分控制算法,丝杠的运动分辨率理论上可达0.07um,实际重复精度可达0.1um。外接人机界面通过手动控制滑台的运行距离、前进后退以及运行速度,实现高精度可控制的测试测量。
四实验平台软件设计
下位机软件设计包括基站与移动标签程序设计。系统以主动扫描标签方式构建,所有行为集中在主基站上,实验中只需要操控配置主基站即可。具体定位的执行步骤如图 4 所示。
主基站A先向标签发出脉冲信号进行测距,测距值实时的传递回电脑的上位机软件中;然后A基站与B基站建立联系,并向B基站下达测距命令,测得B基站与标签的距离传递回A基站(对应图3.1中的2、3、4步骤);C基站与标签测距同B基站操作步骤,完成标签与三个基站的测距。
上位机软件使用C#编写,通过与电脑连接的主基站实现数据的发送与接收,主要完成标签的定位,同时可实时显示标签相对的位置坐标以及与各基站的距离。界面如图5所示。
设备默认波特率为115200bps,默认的MODBUS-ID为1。当标签为一个时,启动持续自动输出模式;当标签为多个时,启动扫描定位模式,刷新频率降低。
五 实测结果分析
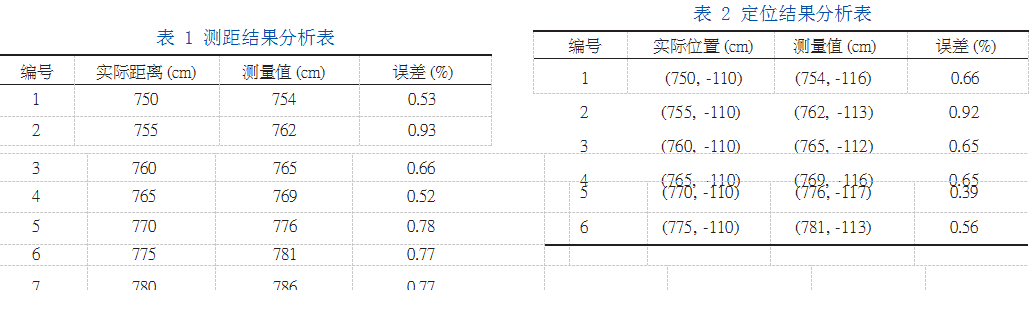
系统采用24V直流开关电源,将各基站固定于实验环境周围,主基站与电脑连接,各模块按照步骤配置完毕即可开展实验。测距实验,上位机软件设备设置选择一对一测距,通过指定步进电机行进距离测得定位标签的实际位置信息,记录得到的测量值计算测距的具体误差。部分测距记录值如表1所示。
定位实验,上位机软件设备设置中选择二维测距,在基站设置中配置好各基站位置坐标信息,载入配置即可开始定位实验,位置坐标与实时的测量信息会动态显示在上位机中。部分定位实验记录值如表2所示。
六 结语
本文采用滚珠丝杠和三菱 FX2NPLC 结合 HMI触摸屏组成移动站标签的运动控制系统,实现了UWB测距实验平台的搭建,设计实现了定位和测距上位机软件,并应用于实际教学实验中。该系统具有操作简单、性能稳定、可重复性好等优点,便于现场学生操作,直观的界面,有利于学生理解掌握UWB测距与定位原理,取得了较好的实验与实践效果。
参考文献
[1]冯星明,倪冰.主流室内定位技术应用研究[J].现代建筑电气,2017,2(8):21-25.
[2]张新跃,沈树群.UWB超宽带无线通信技术及其发展前景[J].数据通信,2004,2:9-12.
[3]王爱佳.UWB技术与应用研究[J].中外企业家,2013(34):206-207.
[4]常华伟,王福豹,严国强.无线传感器网络的TOF测距方法研究[J].现代电子技术,2011,(1):35-38.
[5]贾豫东,张晓青.嵌入式系统设计实验平台构建[J].教育现代化,2017(6):78-79.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/10388.html