SCI论文(www.lunwensci.com):
摘 要:雷达原理中测距测角测速等部分,内容比较抽象,不利于学生理解。为了加强学生对雷达测距测角测速原理部分的理解,增强学生对雷达测距测角测速原理的认识,提高其理论运用能力及实践能力。本文设计了雷达测距测角测速实验系统,可以满足雷达测距测角测速原理部分的实验教学需求,提高了实验室建设效率,为雷达原理实验室建设提供了参考。
关键词:雷达原理与系统;雷达测距测角测速;试验系统设计
本文引用格式:吕萌 , 等 . 雷达测距测角测速实验系统建设研究 [J]. 教育现代化 ,2020,7(33):98-101.
Research on the Experimental System of Radar Ranging, Angle and Velocity Measurement
LV Meng, YAO Zhi-gang, XIE Hui, MA Jun-tao, YIN Yuan-wei
(Department of Electronic and Optical Engineering of Shijiazhuang Campus Army Engineering University of PLA Shijiazhuang Hebei)
Absrtact: In the principle of radar, the contents of ranging, angle and velocity are abstract, which is not easy for students to understand. In order to strengthen students’ understanding of the principle of radar ranging, angle and velocity measurement, enhance students’ understanding of the principle of radar ranging, angle and velocity measurement, and improve their theoretical application ability and practical ability. In this paper, the experiment system of radar ranging and angular velocity measurement is designed, which can meet the needs of experiment teaching of the principle part of radar ranging and angular velocity measurement, improve the efficiency of laboratory construction, and provide a reference for the construction of radar principle laboratory.
Key words: Radar principle and system; Radar ranging; Angle and velocity measurement; Test system design
一 引言
“雷达原理与系统”是雷达工程、电子对抗等专业的专业基础课程,是学习后续专业课程的基础。理解、掌握现代雷达的组成结构、雷达方程、测距测角测速原理,建立完整雷达系统概念,是后续雷达信号处理、雷达、电子对抗装备课程学习的基础。为了提高雷达原理与系统的教学效果,适应现代雷达系统的发展,近些年来雷达原理与系统中实验教学的比重渐渐提高。尤其是测距测角测速等雷达原理部分,内容比较抽象,不利于学生理解。为此, 需要加强雷达测距测角测速原理部分的实验课程, 以便增强学生对雷达测距测角测速原理的认识,提高其理论运用能力及实践能力。
雷达原理与系统课程中的测距原理主要有脉冲法测距和调频法测距;测角原理主要有相位法测距和振幅法测距;测速原理主要是多普勒测速。其中相位法测角多用于反辐射导弹,在雷达工程实践中用的较少,因此也不是雷达原理教学的重点,因此测角原理的重点是振幅法测距中的最大信号法测角和等信号法测角。要想在一个实验室中完成上述原理实验教学,需要对设计一体化的实验装置,能够满足脉冲法测距、调频法测距、最大信号法测角和等信号法测角和多普勒测速。实验系统应能够自主调整系统参数、观察实验现象、验证实验结果,以达到对实验原理与核心知识点的充分理解。
二 实验系统总体设计
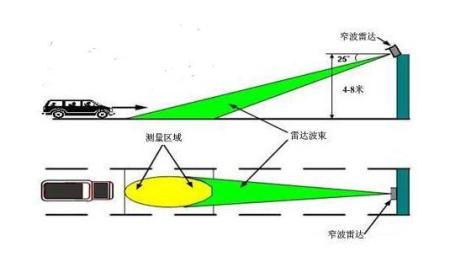
雷达测距测角测速实验系统主要完成脉冲法(超声波)测距、调频法测距(24G 调频连续波)、最大信号法测角、等信号法测角和多普勒(24G 点频连续波)测速实验。由于实验室场地的限制,实验系统不能太大,在较短的距离实现射频的脉冲法测距比较困难。声速较光速慢的多,因此完成脉冲法测距实验所需的长度也会大大减小。故脉冲法测距实验主要由超声波测距模块来完成。其余实验内容主要由 24G 雷达来完成。
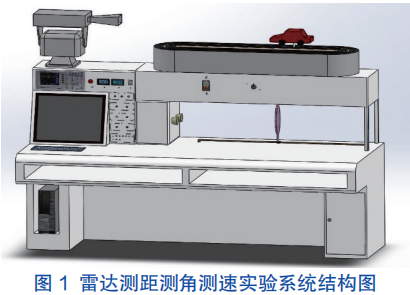
实验系统的总体设计布局见图 1。
本实验系统由四部分组成:位于平台左上半部分,是 24G 雷达模块,主要完成雷达射频发射和接收, 以及天线转台的功能,是本实验平台的核心部分;在发射接收下面是测量控制单元,包括上位机和测试仪器,以及信号测试接口,供学生观察信号以及实验现象;位于实验平台右上方的是测速实验所需的可调速运动反射体;右下方为超声波测距实验单元。
三 超声波测距实验单元设计
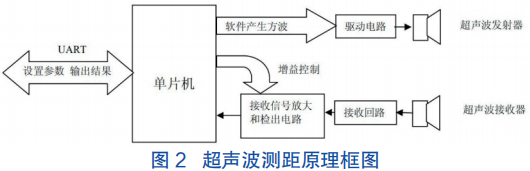
本实验的脉冲法测距实验采用超声波测距的方法。超声波测距模块主要由发射电路,接收电路,
发射控制单元以及上位机组成。其原理框图如图 2 所示。
由于 40KHz 时超声波测距的灵敏度最高,测量范围最精准,考虑实际工程测量要求,在设计超声波测距仪时,选用频率 40kHz 的超声波。
图 2 中,单片机为核心控制部分,根据设定的工作方式,产生 40kHz 方波,经过驱动电路驱动超声波发生器发出一簇信号。单片机此时开始计时。接收回路为谐振回路,将收到的微弱回波信号检出, 送信号放大电路放大,收到产生脉冲输出送单片机中断端,单片机收到中断信号后停止计时,计算出距离值,保存等待读出或直接经通用异步收发控制器(UART)送出。接收过程中,单片机定时控制放大电路的增益,逐渐提高,以适应距离越远越弱的回波信号。
超声波测距模块的工作原理为:
1.采用 IO 口 Trig 触发测距,单片机提供不同脉宽的 TTL 的高电平脉冲信号,通过改变可调的脉冲宽度,可以演示超声波测距的最小距离范围。
2.通过上位机程控改变超声波测距模块工作的频率范围,实现实验通过控制器改变超声波测距的重复频率,以演示不同重复频率下超声波测距的模糊与精准距离的对比。
3.实验中由测距电路模块自动发送 8 个 40KHz 的方波,自动检测 是否有信号返回。
4.有信号返回时,通过 IO 口的 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离 =( 高电平时间 × 声速 (340m/s))。
四 24G 雷达模块设计
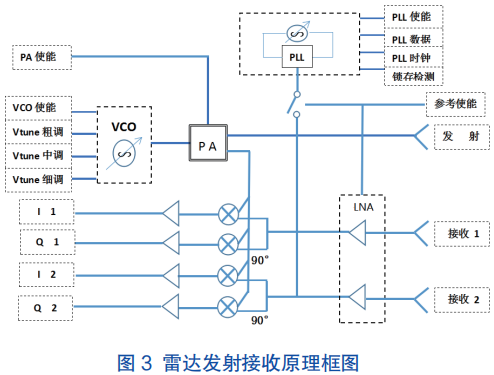
24G 雷达系统主要由发射通道,接收通道 1、接收通道 2 和天线组成,其原理框图如图 3 所示。
本系统雷达发射接收模块可以通过选择工作在连续波(CW)/ 调频连续波(FMCW)作模式。VCO 为压控振荡器,可以根据控制电压调节(Vtune)来调节输出频率。系统具有独立的锁相环(PLL)振荡器可矫正参考频率,利用参考频率,用户可确定相应的调制信号 Vtune 的幅值。系统具有独立的发射和接收路径,可获得最大增益。在原理框图中,一根为发射天线, 两根为接收天线,I1、Q1、I2、Q2 为接收机的四个接收通道,每个接收通道都配有低噪声的射频(RF)放大器和中频(IF)前置放大器。工作于 CW 模式时,可将 Vtune 悬空或设为某恒定直流值,不做调制使用。
工作于 FMCW 模式时, 首先要设置调制信号, 设置调制波形为锯齿波(静态测距)或者三角波(同时动态测距和测速);调频宽度由 Vtune 的幅值决定,选取调谐曲线上线性较好的一段(0 ~ 3V 范围内),即可获得相应的调频宽度;调制频率则与探测距离相关,一般不超过 1kHz。
雷达发射端输出一个频率为 t 的信号,一路经发射天线发射出去,一路又分成 4 路分别进入 I1、Q1、I2、Q2 所在的通道, 其中 Q1 和 Q2 两路信号还需经 90°的移相;两根接收天线接收到的回波信号,先经低噪声放大处理后,再经混频器与之前的 4 路信号进行混频。混频后得到的信号再经中频滤波处理,最终得到 I1、Q1、I2、Q2 四路信号。
使用一根接收天线:仅分析 I1、Q1、I2、Q2 其中一路信号,可得运动目标存在信息;同时分析 I1、Q1,或者同时分析 I2、Q2,可得运动或者静止目标的速度和距离信息,同时还可辨别运动目标的方向。
使用两根接收天线:同时分析 I1、I2,或者同时分析 Q1、Q2,可得目标的角度信息。
天线部分采用 24G 一发两收微带天线,实物图如图 4 所示。
发射天线水平、垂直方向波束宽度(-3dB)分别为 13°、23° ;水平、垂直旁瓣抑制比均为 15dB。. 接收天线水平、垂直方向波束宽度(-3dB)分别为 13°、55° ;水平、垂直旁瓣抑制比分别为 15dB、10dB。
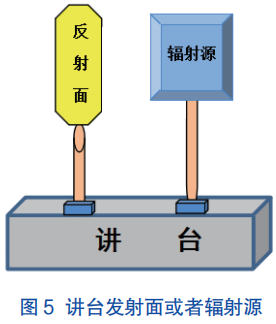
此外,在进行测角实验时,为了增强实验效果, 还配备了讲台发射面或者辐射源。如图 5 所示。
五 天线转台
将固定在俯仰结构件上的天线安装至天线转台, 转台应具备优良的机械性能和精密的转动控制。
设计特点如下。
(1)特殊的结构设计保证了旋转台面极低的端跳和偏心,使旋转运动更加稳。
(2)旋台的中心通孔与旋转中心有严格的同轴度要求,方便做精密定位。
(3)采用精密研配的蜗轮蜗杆结构,运动舒适, 可以任意正向和反向旋转且空回极小。
(4)设计精巧的消空回结构,可调整长期使用造成的空回间隙。
(5)旋转轴系采用多道工艺精密加工而成,配合精度高,承载大,寿命长。
(6)步进电机和蜗杆通过进口高品质弹性联轴节连接,传动同步,消偏性能好,大大降低了偏心扰动且噪音小
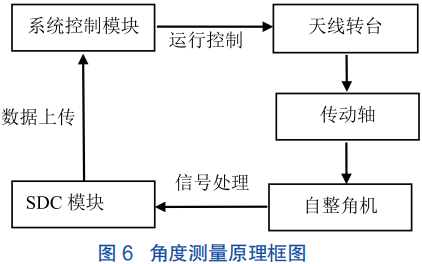
六 天线角度测量模块
该部分包括自整角机和 SDC 采集板,该方式在原理上还原雷达的方位码产生过程。自整角机将天线的角度信息实时的转换成电气信号。SDC 模块接收自整角机的电气信号并将其转换为 12 位的数字方位码。系统控制模块接收 SDC 模块的 12 位方位码转换成角度值显示。
(一) 自整角机
与天线转台同轴安装,采用国营青岛微电机厂生产的 45KF5B 自整角机,使之与天线同轴安装, 把天线的角度信息转换为三相电气信息。
(二) SDC 模块
核心采集模块型号为 SDC1700,是一种小型化的 12 位连续跟踪的自整角机数字转换器,采用Ⅱ阶伺服回路设计,数字输出具有三态锁存功能。该模块接收自整角机的信号,转换为 12 位的数字信号。
七 24G 辐射源
在教室环境下,主动发射信号用于测角效果不佳,采用辐射源发射信号作为目标的方式测角,更有利于实验原理的展示。该发射源采用 VCO 和喇叭天线,VCO 输出频率与系统发射频率相近,频率范围为 24G--25G, 具体通过系统需要设置。
技术特征如下。
1.采用先进的 MMIC 技术的 K 波段 VCO。
2.CW/FSK/FMCW/PW 工作模式。
3.独立的 PLL 振荡器可矫正参考频率。
4.利用参考频率,用户可确定相应的调制信号Vtune 的幅值。
5.独立的发射和接收路径,可获得最大增益。
6.1 发双收,一路为发射天线,两路为接收天线。
7.I1、Q1、I2、Q2 四个接收通道。
8. 低噪声的 RF 和 IF 前置放大器。
八 测量控制单元
测量控制单元由数据采集功能模块、控制功能模块和软件分析功能模块组成。数据采集功能模块: 包括检波器、相位比较器、天线角度测量(自整角机和 SDC 采集板)和数据采集板。控制功能模块: 包括 STM32 核心系统控制模块、天线转台、电动滑台、以及各受控模块的控制接口。软件分析功能模块: 包括数字示波器、实验系统软件的数据存储、显示、计算和分析模块。
在控制单元中,可以对发射信号的脉宽、重频、载频、调频带宽等参数进行设置,能够满足学生实验过程中对雷达参数的调整,方便学生观察到距离分辨力、最大单值测距范围、测距模糊、最小探测距离、多普勒频移等实验结果参数的变化。
九 实验室应用价值
采用上述方案,雷达测距测角测速实验系统能够满足对于雷达原理中脉冲法测距、调频法测距、最大信号法测距、等信号法测距、多普勒测速原理实验的实验教学。而且在实验中,学生可以进行开放性实验,通过在测量控制单元中对发射信号进行各种参数设置,来观察不同参数带来的不同测量结果,进而分析各种发射信号参数对雷达探测性能的影响,最终达到加深学生对测距测角测速原理的理解,提高他们的理论基础水平,强化他们的动手能力、实验能力、创新能力,为培养具有创新能力的高层次人才奠定基础。此外,实验系统进一步完善后,还可以服务于研究生教学,与雷达信号处理实验系统相连接,提供相关研究生课程的的自主开放性实验和设计性实验,以及研究生课题研究过程中的雷达系统仿真。
参考文献
[1]丁鹭飞 , 等.雷达原理(第 5 版)[M].北京:电子工业出版社, 2014.
[2]张明友, 等,雷达系统(第 5 版).雷达信号处理基础 [M].北京: 电子工业出版社,2018.
[3]曾会勇 , 徐彤 , 胡国平 , 等 . 基于建构理论的“雷达信号处理” 课程创新与实践 [J]. 教育现代化 ,2019,6(75):204-205+210.
[4]彭 鹏 , 孙 静 . 浅 谈 船 用 雷 达 的 检 修 [J]. 教 育 现 代化 ,2018,5(11):362-364.
[5]杜鸿, 张敏. 数字图象处理课程中视频分析演示和实验系统[J]. 教育现代化 ,2018,5(30):158-159+172.
[6]王浩 . 24G 测距测角雷达前端的设计与实现 [D]. 西安电子科技大学 ,2018.
[7]王俊喜 . 毫米波汽车防撞雷达多目标信号检测算法研究 [D]. 哈尔滨工程大学 ,2016.
[8]汪意焙 . 24GHz 汽车防撞雷达系统的研究与实现 [D]. 电子科技大学 ,2018.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/31957.html