SCI论文(www.lunwensci.com)
【摘要】目的 分析机器人与腹腔镜联合手术室护理对切除肾部分组织患者的肾功能及并发症的影响, 为今后临床治疗该疾病提供参 考依据。方法 选取 2022 年 1 月至 2023 年 3 月徐州医科大学附属医院收治的行肾部分组织切除术治疗的 60 例患者, 应用随机数字表法 分为两组, 每组 30 例。对照组患者采用普通腹腔镜肾部分切除术联合手术室护理, 观察组患者采用机器人与腹腔镜联合手术室护理, 两 组患者术后均定期随访 3 个月。比较两组患者手术相关指标, 术前和术后 7 d 肾功能指标, 以及随访期间并发症发生情况。结果 观察组 患者手术时间和住院时间短于对照组, 术中出血量少于对照组;与术前比, 术后 7 d 两组患者血肌酐、血尿酸均升高, 而观察组低于对照 组, 肾小球滤过率均降低, 而观察组高于对照组(均 P<0.05 ); 随访期间, 观察组患者并发症总发生率(3.33% )低于对照组(23.33% ), 但组间比较,差异无统计学意义(P>0.05 )。 结论 机器人与腹腔镜联合手术室护理能够缩短切除肾部分组织患者的手术时间和住院时 间,减少术中出血量,对患者肾功能损伤小,安全性良好。
【关键词】机器人,腹腔镜,手术室护理,肾切除,并发症,肾功能
腹腔镜手术作为一种传统的微创手术技术创伤小,在 肾脏手术中也取得了显著的成果,但肾肿瘤的复杂程度会 影响手术的难度和围手术期预后,难以完成直径较大、位 置较复杂的局限性肾肿瘤 [1] 。机器人辅助手术系统的引入 为肾脏手术带来了新的可能性,其能克服传统腹腔镜手术 的不足,具有视野清晰、操作精密等优点,能够完成高难 度肾脏部分切除 [2] 。虽然腹腔镜手术对患者影响较小,但 仍属于侵入性、创伤性手术,手术室护理旨在提高手术室 护理质量,关注患者安全、手术准备、术中和术后的配 合,保证手术顺利进行 [3] 。然而,尽管机器人辅助手术在 手术过程中表现出色,但其对患者术后并发症与肾功能的影响是否优于传统腹腔镜手术仍缺乏高级别循证依据,需 继续深入研究。基于此,本研究旨在探讨机器人与腹腔镜 联合手术室护理对切除肾部分组织患者的并发症与肾功能 的影响,现报道如下。
1 资料与方法
1.1一般资料 选取 2022 年 1 月至 2023 年 3 月徐州 医科大学附属医院收治的行肾部分组织切除术治疗的 60 例患者,应用随机数字表法分为两组。对照组(30 例)患者中男性 1 7 例, 女性 1 3 例; 年龄 3 0 ~ 6 7 岁, 平均(42.02±3.28 )岁;肿瘤直径 4.3~4.9 cm ,平均(4.45±0.13)cm ;肿瘤位置:左肾 16 例,右肾 14例;病 理类型:透明细胞癌 14 例,乳头状肾细胞癌 8 例,嫌 色细胞癌 8 例。观察组(30 例)患者中男性 18 例,女 性 12 例;年龄 30~66 岁,平均(42.06±3.23 )岁;肿瘤 直径 4.2~4.8 cm,平均(4.48±0.12 )cm ;肿瘤位置:左 肾 17 例,右肾 13例;病理类型:透明细胞癌 16 例,乳 头状肾细胞癌 7 例,嫌色细胞癌 7 例。两组患者基线资 料比较,差异无统计学意义(P>0.05),组间可比。纳入 标准:①符合《中国泌尿外科疾病诊断治疗指南(2014 版)》[4] 中肾部分组织切除手术的手术指征;②肾部分组 织切除手术均为首次进行;③无明显远处转移。排除标 准:①多发性肾脏病变;②有严重的全身性感染;③有 明显凝血功能障碍;④同时接受其他腹部手术。研究符 合 2013 年修订的《赫尔辛基宣言》中的相关要求并经徐 州医科大学附属医院医学委员会批准,患者均签署知情同 意书。
1.2手术与护理方法
1.2.1 手术方法 对照组患者采用普通腹腔镜肾部分切除 术:患者接受全身麻醉后,取健侧卧位,手术入路可选择 经腹腔或经腹膜后方式。通过三孔法将戳卡置入,连接 气腹机(杭州康友医疗设备有限公司,型号:KY-QFJ-A), 压力维持在 12 mmHg( 1 mmHg=0.133 kPa),在腹腔镜下 操作,首先进行肾蒂的游离,紧接着充分游离肾脏并清除 周围脂肪,保留肿瘤表面的脂肪组织,随后撤离腹腔镜, 通过选取距离操作部位最近的戳卡延长切口或新开小切 口,切口大小为 4~6 cm,足够容纳一只手进入腹腔,以 确保手术操作的便利性,通过此切口,手指可以轻松牵引 肾脏,使手术区域得以充分暴露。采用血管钳阻断肾动 脉,使用冰屑进行局部降温。通过拉钩悬吊腹壁,创造出 足够的操作空间,通过小切口进行单手与腹腔镜器械的联 合操作,以确保肿瘤及周围脂肪的完整切除。最后,采用 3-0 可吸收倒刺缝线缝合创面出血点或破损的集合系统, 2-0 可吸收倒刺缝线缝合肾脏创面。
观察组患者接受机器人与腹腔镜联合手术治疗:手术 时,患者取健侧 45°~70° 的卧位, 腰桥轻微升起, 腰桥建议 取 45° 角度, ①腹膜后途径操作方式为:在髂嵴上方 2 cm 处或第12 肋下的背侧组织薄弱处作第一个操作通道切口, 通过组织钳与食指结合,钝性游离探查进入腹膜后间隙, 可使用自制球囊、球囊扩张器或观察镜直接钝性扩张腹膜 后空间。观察镜头直视下或手指引导下,在 12 肋缘下腋 前线及腋后线外侧插入 8 mm套管针(Trocar)作为其他机 械臂通道孔。根据助手和手术操作需求,可在镜头孔与腋 前线机械臂孔连线中点斜下方置入 12 mm常规Trocar 作为 辅助孔,机械臂绑定器械后,术者沿肾后及腰大肌前间隙游离寻找肾动脉,并做好标记,然后进行肾脏肿瘤周围游 离、肿瘤切除及缝合,腹膜后途径主要适用于肾外侧缘、 肾门后唇及肾背侧肿瘤。②经腹腔操作方式为:取脐上约 1 cm 切口, 采用气腹针穿刺, 经历 2 次脱空感后进入腹腔 建立气腹, 将气腹压维持在 12~15 mmHg,切口置入 8 mm 的 Trocar,并将机器人镜头插入作为镜头孔,镜头翻转, 直视下平行于腹直肌外缘距离镜头孔两侧 6~10 cm处,再 插入 8 mm Trocar 作为机械臂通道,机械臂操作孔与机械臂 之间保持适当距离, 同时在脐周插入普通 12 mm Trocar 作 为辅助通道,安装机械臂,运用无损伤血管夹谨慎夹断肾 脏血管,顺着肿瘤与正常肾组织的交界面仔细切除肿块。 在完整切除肾脏肿瘤后,使用 3-0 可吸收线对血管断端进 行“8”字缝扎, 并修复受损的集合系统。随后, 采用 3-0 倒刺线先对创面底层进行缝合, 最后使用 1-0 或2-0 倒刺线 连续缝合肾脏创面,解开阻断肾动脉的无损伤血管夹后, 仔细检查以确保肾脏创面无出血,利用医用杀菌液体材料 多次冲洗创面,然后使用止血材料覆盖创面。将切下的标 本装入标本袋,同时保留一根螺旋引流管,扩大观察孔以 取出肿瘤标本,采用可吸收外科缝线逐层关闭各个切口。 两组患者术后均定期随访 3 个月。
1.2.2 护理方法 入组患者均接受手术室护理:①确保患 者全身麻醉安全、维持卧位姿势稳定,戳卡置入前消毒操 作区域,连接气腹机维持适当气腹压,腹腔镜操作期间, 护理人员要密切监测患者生命体征,保持手术区域的清 洁,在撤离腹腔镜后,细致消毒戳卡周围,并严格执行手 术切口护理。②监测气道通畅和呼吸:使用合适的气管插 管技术维持呼吸道的稳定性,使用监测设备密切监测患者 的呼吸情况,包括呼吸频率、呼气末二氧化碳分压等,及 时发现呼吸问题,采取相应的措施。③在创面缝合过程 中,护理人员需提供有效止血手段,确保无渗血,对缝合 处使用适当的敷料,并监测患者的术后感染情况。
1.3观察指标 ①手术指标。记录对比两组患者手术 时间、术中出血量及住院时间。②肾功能指标测定。术 前及术后 7 d 采集患者空腹静脉血 3 mL ,经过离心 (3 000 r/min,10 min)和静置,分离出血清,用全自动生化 分析仪(济南汉方医疗器械有限公司,型号:HF-240)检 测血清血肌酐、血尿酸值水平,计算肾小球滤过率 =186× (血肌酐) -1.154 ×(年龄)-0.203 ×(0.742)女性。③并发症。统 计两组感染、尿瘘、肠梗阻、腹泻等发生情况。
1.4统计学方法 采用 SPSS 24.0 统计学软件分析数据, 计数资料以 [ 例 (%)] 表示,采用 χ2 检验;计量资料均使 用 S-W 法检验证实均服从正态分布,以 (x ±s) 表示,组 间比较采用独立样本t检验,术前术后比较采用配对t 检 验。以P<0.05 为差异有统计学意义。
2 结果
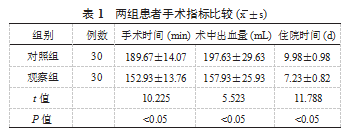
2.1两组患者手术指标比较 观察组患者手术时间和住 院时间短于对照组,术中出血量少于对照组,差异均有统 计学意义(均P<0.05),见表 1.
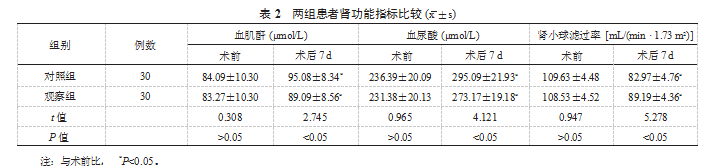
2.2两组患者肾功能指标比较 与术前比,术后 7 d 两 组患者血肌酐、血尿酸升高,而观察组更低;肾小球 滤过率降低,而观察组更高,差异均有统计学意义(均 P<0.05),见表 2.
2.3两组患者并发症发生情况比较 随访期间,两组患 者并发症总发生率比较,差异无统计学意义(P>0.05 ), 见表 3.
3 讨论
肾肿瘤的危害主要表现在其潜在的侵袭性和转移性, 可能导致局部组织破坏和远处器官的转移。当肿瘤无法通 过药物治疗有效控制时,切除肾部分组织成为治疗的有效 手段,相比于开放手术,腹腔镜手术创伤小,患者术后恢 复快,但其操作难度大,风险高,学习曲线较长 [5]。
机器人辅助治疗迎合了迅速发展的医学技术和手术需 求,通过高精度操控、三维视野、独特的内腕设计等,超 越了传统腹腔镜手术人手之所及的灵巧运动和人眼之所能 的立体视觉,提升了手术的精准性、灵活性、稳定和安全 性 [6] 。机器人辅助治疗可以让术者手术时按照自己的习惯 和要求选取最合适的视角和视野,从而避免了手术时间延长,且医师不仅能以坐姿完成手术,也可以自行调整舒适 体位,降低医师的疲劳感,从而将精力更多地关注手术本 身,保证手术的高效与精确 [7] 。此外,手术室护理通过严 格执行无菌技术、监测患者生命体征、保持手术环境清洁等措施, 确保手术的安全、高效进行, 降低并发症风险 [8]。 本次研究结果显示,观察组患者手术时间和住院时间短于 对照组,术中出血量少于对照组,并发症发生率低于对照 组,但并发症发生率组间比较, 差异无统计学意义, 表明机 器人与腹腔镜联合手术室护理能够缩短切除肾部分组织患 者的手术时间和住院时间,减少术中出血量,安全性高, 有利于患者术后恢复。
肾癌术后,肾脏缺血导致急性肾损伤,导致肾功能 降低,肾小球滤过率降低;血肌酐正常情况下通过肾小球 滤过后随尿液排出,使肾小管很少吸收肌酐,当肾小球 滤过功能受损时,其在体内的水平升高;血尿酸中尿液是 其主要排泄途径,当肾小球滤过率下降时,可导致尿酸排 泄障碍,导致血尿酸水平升高,其水平越高反映肾功能越 差 [9-10] 。本研究中,术后 7 d 两组患者血肌酐、血尿酸均 升高,而观察组低于对照组,肾小球滤过率均降低,而观 察组高于对照组,表明机器人与腹腔镜联合手术室护理能 够减少对切除肾部分组织患者的肾功能损伤。分析其原因 为,相比于传统腹腔镜手术,机器人手术系统提供的三维 视觉和高度灵活的机械臂有助于更精确地保护周围组织和 保留正常肾单位,缩短手术时间及肾缺血时间,从而减轻 了手术对肾功能的影响,更好地保护肾功能;另一方面, 联合手术室护理下,患者在手术前后得到更全面的监测 和护理,术后康复更为顺利,进而促进了肾功能的良好 恢复 [11-12]。
综上,机器人与腹腔镜联合手术室护理能够缩短切除 肾部分组织患者的手术时间和住院时间,减少术中出血量,对患者肾功能损伤小,安全性高,有利于患者术后恢复, 但是本研究的样本量较少,且属于单中心的临床研究,因 此需要进一步深入探讨。
参考文献
[1] 张少杰 , 徐晓峰 , 杜泉 , 等 . 后腹腔镜保留肾单位的肾部分切 除术对 T1 期肾肿瘤的临床效果 [J]. 实用临床医药杂志 , 2019.
23(23): 47-50.
[2] 王林辉 , 叶华茂 , 吴震杰 , 等 . 机器人辅助腹腔镜肾部分切除 术与传统腹腔镜肾部分切除术适应证选择及临床疗效对比研 究 [J]. 第二军医大学学报 , 2013. 34(7): 719-726.
[3] 蔡慧. 基于量化评估策略的手术室护理对腹腔镜手术患者情绪、 应激反应的影响 [J]. 医学理论与实践 , 2023. 36(14): 2463-2465.
[4] 那彦群 , 叶章群 , 孙颖 , 等 . 中国泌尿外科疾病诊断治疗指南 (2014 版 )[M]. 北京 : 人民卫生出版社 , 2013: 256-257.
[5] 张巍 , 黄应福 . 腹腔镜与开放肾部分切除术对患者炎症指标、前白蛋白及肾功能的影响 [J]. 右江医学 , 2017. 45(6): 696-699.
[6] 阮东丽 , 张更 , 李智斌 , 等 . 机器人辅助腹腔镜与后腹腔镜肾部分切除术近期临床疗效比较 [J]. 临床泌尿外科杂志 , 2016. 31(6):538-542.
[7] 富智斌 , 陈如潭 , 顾迪 , 等 . 机器人辅助与传统腹腔镜肾部分切 除术治疗早期肾癌合并肥胖患者的疗效对比 [J]. 第二军医大学 学报 , 2020. 41(7): 704-708.
[8] 张瑞红 . 手术室护理干预对肿瘤手术患者应激反应的影响分 析 [J]. 中国医药指南 , 2019. 17(32): 200-201.
[9] 马巍巍 , 王龙信 , 钱炜 , 等 . 超选择性肾分支动脉栓塞联合零缺 血后LPN 对T1 期肾癌患者术后肾功能影响 [J]. 国际泌尿系统杂 志 , 2023. 43(1): 13-16.
[10] 吴震杰 , 刘冰 , 时佳子 , 等 . 荧光引导肾动脉分支阻断的机器人 腹腔镜肾部分切除术 (“大家泌尿网”观看手术视频 )[J].现代泌 尿外科杂志 , 2021. 26(9): 723-725.
[11] 王帅彬 , 范来来 , 虞海峰 , 等 . 机器人外科手术系统辅助下腹 腔镜肾部分切除手术的研究进展 [J]. 温州医科大学学报 , 2023.53(9): 768-775.
[12] 王红 . 手术室护理路径对腹腔镜手术患者配合效率的影响 [J]. 临 床医学工程 , 2018. 25(2): 233-234.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/yixuelunwen/75158.html