根据对准确性与响应速度的要求,选用无刷电机作为摇杆的核心驱动部件,并建立了无刷电机的数学模型。...
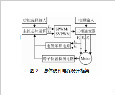
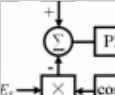
针对目前全驱动型机器人的高工作精度以及高稳定性需求,设计全驱动型机器人关节驱动控制系统。基于无刷电机数学模型,电机驱动方案采用矢量电机控制算法FOC,电机角速度位置采用有感、...
成仿吾,无产阶级革命家、忠诚的共产主义战士... 详细>>
如何设计有效的环境治理政策, 是学术界和政策... 详细>>