SCI论文(www.lunwensci.com)
摘要:针对目前全驱动型机器人的高工作精度以及高稳定性需求,设计全驱动型机器人关节驱动控制系统。基于无刷电机数学模型,电机驱动方案采用矢量电机控制算法FOC,电机角速度位置采用有感、无感相结合获取,即在启动以及低速转动下采用位置传感器,在中高速转动下切换使用滑模观测器。观测器对电机反电动势观测值进行运算处理,获得电机位置和速度。在MATLAB/Simulink搭建控制模型,验证算法可行性。仿真结果表明:在负载情况下,中低转速下,控制精度低,低成本位置传感器足以满足控制需求;在中高转速下,位置获取方法切换为滑模观测器,此时无位置传感器控制,无需使用高精度位置传感器,根据电机运行的电流观测到的位置,足以满足中高转速需求。且观测器监测内部运行状态,无视外界影响,大大提高控制系统的响应性与稳定性。
关键词:全驱动型机器人;无刷电机;电机控制算法;矢量控制(FOC);滑模观测器;无位置传感器控制
Design of FOC Brushless Motor Control System Based on Sliding Film Observer Xu Weilong,Xu Hongyu
(School of Electronic Information Engineering,Shenyang University of Aeronautics and Astronautics,Shenyang 110136,China)
Abstract:Design a joint drive control system for fully actuated robots to meet the high working accuracy and stability requirements of current fully actuated robots.Based on the mathematical model of a brushless motor.The motor drive scheme adopts the motor field-oriented control(FOC)algorithm,and the motor angular velocity position is obtained by combining induction and non induction.That is,position sensors are used during startup and low-speed rotation,and sliding mode observers are used for switching between medium and high-speed rotation.The observer processes the observed values of the motor′s back electromotive force to obtain the motor position and speed.Build a control model in MATLAB/Simulink to verify the feasibility of the algorithm.The simulation results show that under load conditions,at medium and low speeds,the control accuracy is low,and low-cost position sensors are sufficient to meet the control requirements.At medium and high speeds,the position acquisition method is switched to a sliding mode observer.At this time,there is no position sensor control,and high-precision position sensors are not needed.The position observed based on the current of the motor operation is sufficient to meet the requirements of medium and high speeds.And the observer monitors the internal operating status,disregarding external influences,greatly improving the responsiveness and stability of the control system.
Key words:fully driven robots;brushless motor;motor control algorithm;field-oriented control(FOC);sliding mode observer;position sensorless control
0引言
电机是全驱动型机器人和欠驱动型机器人一切运动的根本,电机的选型对机器人的工作效率、稳定性、运动的精度都有着决定性的作用。欠驱动型机器人具有复杂的结构,可合理利用每个刚体的惯量,充分发挥出机械结构的机械性能,具有高负载,高效能优点,其在软件层面上控制算法相对简单[1],但其结构复杂,部分力支撑的结构构件易磨损;全驱动型机器人通过成熟的高刚度机械控制技术,基于运动学建模控制下,让机器人可按照指定的轨迹运动,结构简单,需要反复执行高精度的运动,其驱动控制算法相对复杂[2]。目前大部分双足机器人、机器狗、多足机器人、工程机械臂大多都为全驱动型机器人。
全驱动型机器人关节要承受高负载[3],一般多采用电机加减速箱配比使用,为达到精准闭环控制,需要位置传感器,常采用磁性编码器、光电编码、霍尔编码等[4]。经济型机器人[5]常采用一体化伺服电机,如模拟/数字舵机作为伺服驱动,舵机内主要由有刷电机、电位器、减速齿轮组以及控制电路系统组成,其工作声音大,时延高。长时间使用,有刷电机和其齿轮箱都容易磨损,造成精度降低,至无法使用,其高度集成一体,不易于后期维护,且其体量小,负载能力有限。高成本机器人则为高精度位置传感加无刷电机加行星齿轮组成,相比于普通模拟/数字舵机,其采用无刷电机作为驱动器,由于其采用三相电流控制无需机械换向,从控制精度以及使用寿命方面有着有刷电机无法比拟的优势。滑模观测器为非线性的观测器[6],具有很高的动态响应能力,直接观测电机工作电流,外界噪声干扰几乎不造成影响,鲁棒性能优秀,可有效提高控制系统的稳定。本文从无刷电机基本数学模型出发,研究电机位置观测模型,降低对高精度位置传感器的依赖,同时对机器人关节驱动系统的响应速度、位置回馈系统进行优化。
1基于滑模观测的FOC控制算法
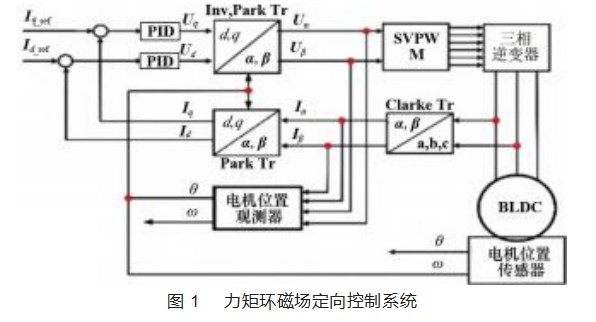
本文在MATLAB/Simulink仿真环境下搭建基于滑模观测器的BLDC力矩环磁场定向控制(Field Oriented Control,FOC)系统[7],结构框图如图1所示。
选用电机参数:极对数为4,定子电阻12.5Ω,额定供电电压24 V,额定电流2.5 A,定子电感15.5 mH,磁链为0.85 Wb,矢量采用Id=0控制。
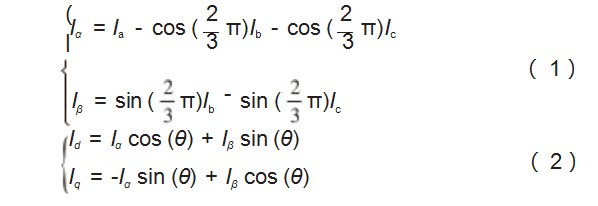
如下式(1)~(2)为FOC控制系统Clarke(1)与Park(2)变换公式[8-9]如下:
Ia,Ib,Ic为传感器采集的无刷电机三相电流值,为非正交基向量,通过Clarke变换正交化为复平面α-β坐标系,降低计算复杂度。Id、Iq分别电机磁通与电机转矩[10-12]。
2 BLDC数学模型
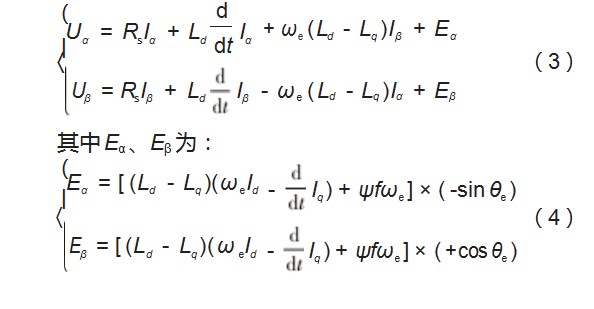
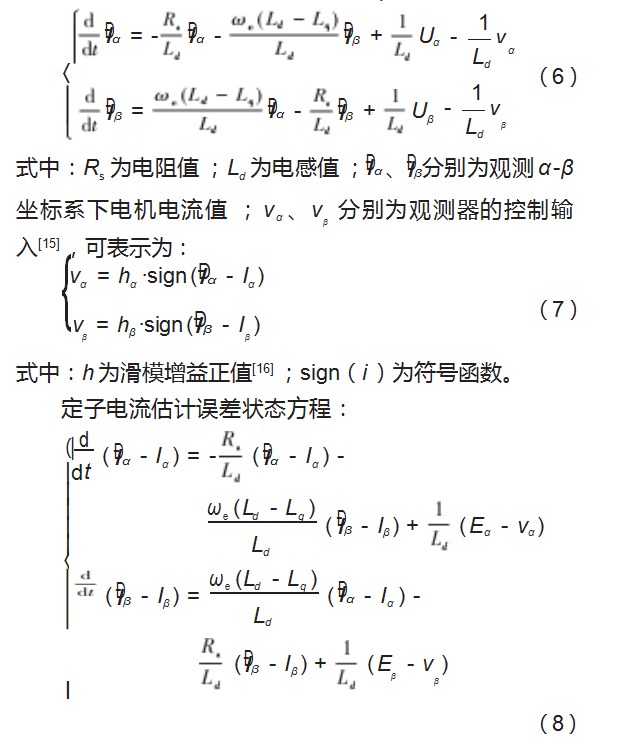
滑模观测器基于电机的数学模型,通过电机定子Clarke变换后α-β坐标系的电压电流建立电机的反电动势[13],α-β坐标系电机电压方程:
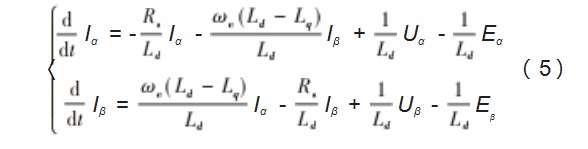
反电动势包含电角度信息,观测器观测Eα、Eβ,电压方程变化为α-β坐标系电机电流方程:
3滑膜观测器
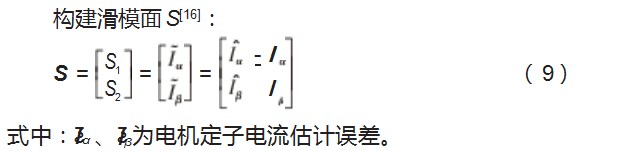
根据BLDC数学模型[14]设计滑模观测器为:
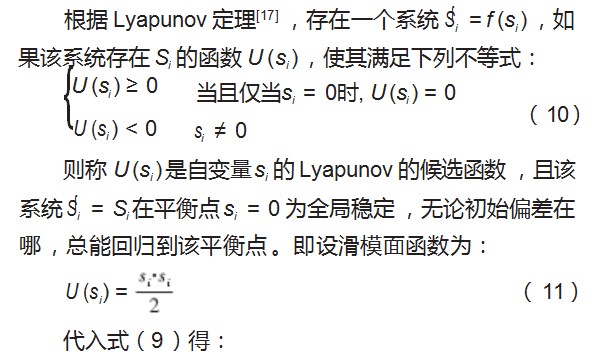
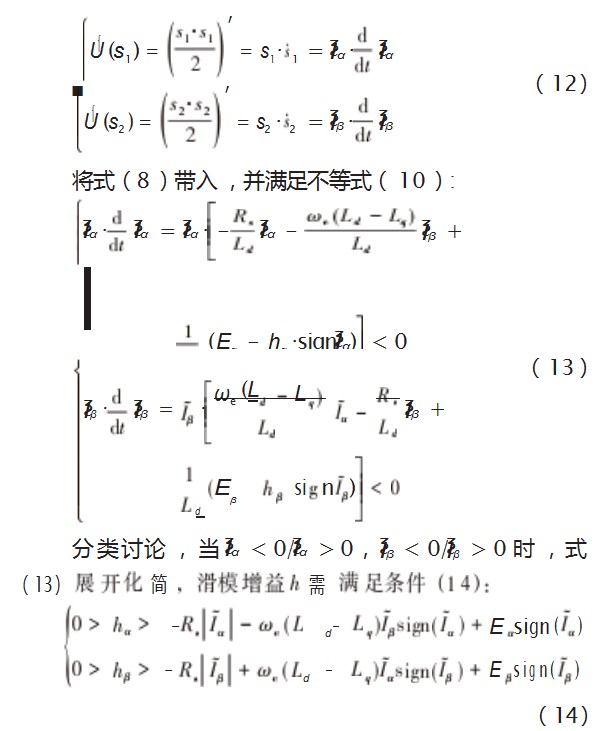
3.1滑模增益
合适的h值,可以使观测电流收敛到实际电流,降低观测电流在实际电流附件抖动幅值,从而为角度提取提高精度。
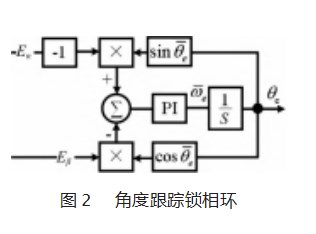
3.2锁相环提取角度
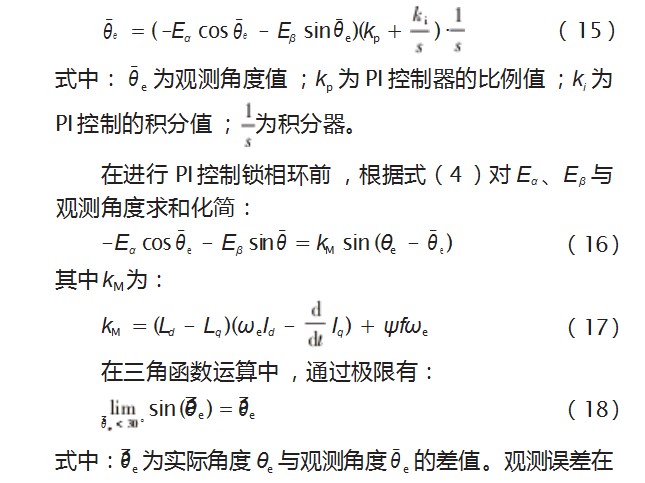
式(4)中包含角度信息,通过电机实际输出的Eα、Eβ作为参考信号,利用锁相环,实现对参考信号频率的自动跟踪。锁相环[18]结构如图2。
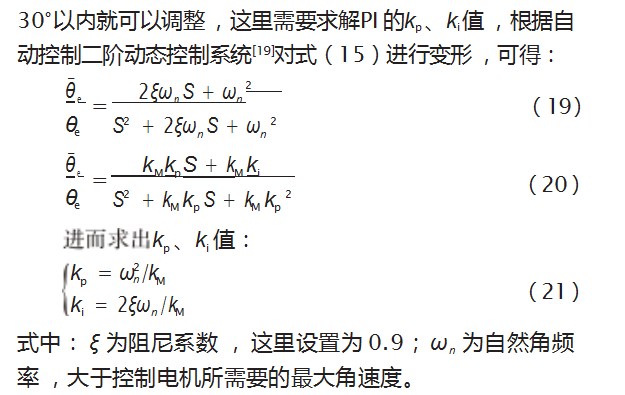
锁相环公式为:
3.3滤波器
观测器观测的Eα、Eβ为高频抖动信号,锁相环在一些kM值下带宽变大,使得Eα、Eβ的高频抖动噪声加入,是得估计出的电角度和电角速度伴随高频噪声。观测系统中需要添加滤波器去掉高频噪声,并进行相应的相位补偿。
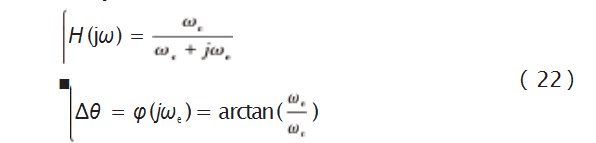
滑模观测滤波器常使用低通滤波器和查找表方式[20]。查找表的滤波器是通过寻找在固定表中寻找合适的截至频率,需要占用不小的存储空间。本文中采用自适应LPF[21],根据kM值决定合适的截止频率,如式(22)分别为其在频域的表达式以及补偿相位角公式,ωc为截止频率,ωe为辨识转速。
4 MATLAB仿真验证与结果分析
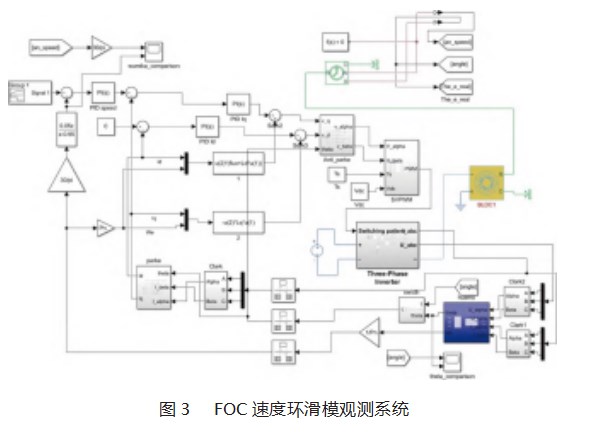
在MATLAB/Simulink仿真环境下搭建滑模观测FOC控制系统,以下测试皆在负载3 N·m转矩情况下运行测试,测试各速段电机启动运行状况。如图3所示为基于滑模观测器的速度环FOC控制系统。
4.1多速段滑模观测电机速度效果
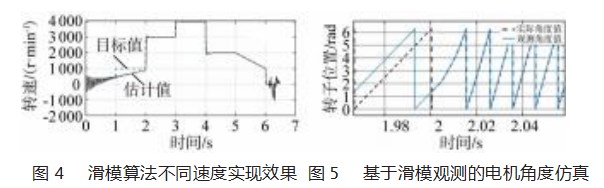
如图4所示,实线为采用滑模观测下的电机速度,虚线为控制目标速度。图中速度范围包含7个阶段,0~500 r/min为加速阶段,1 000、2 000、3 000、4 000 r/min为恒速阶段,2 000~1 000 r/min为减速阶段以及骤停刹车阶段。从图中可以看出滑模算法在1 000 r/min以上中高速阶段速度匹配效果好,低速阶段效果差。
4.2高速电机滑模角度观测效果
如图5所示,实线为滑模观测电机角度值,虚线为传感器观测电机角度实际值。图中在第2 s,位置突变,参考图4中速度,速度由1 000 r/min转为3 000 r/min,差值急剧变化,从图中看出观测角度迅速消除误差,跟踪到实际角度。
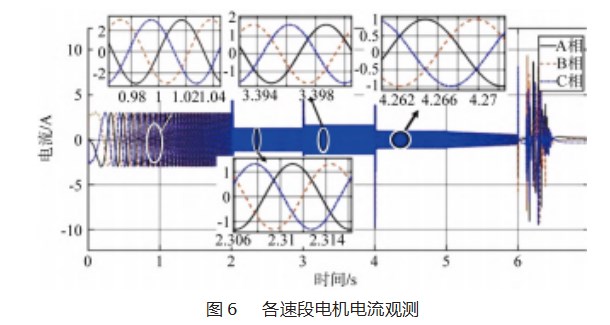
4.3多速段负载电机电流观测
图6所示为电机在各速段内电机运行电流相位,前2 s,滑模跟踪角度不好,转速低,电流大,单相周期长,功率高,小功率电机易发热。在之后的中高、高速情况下,电机工作稳定。
4.4低转速FOC控制
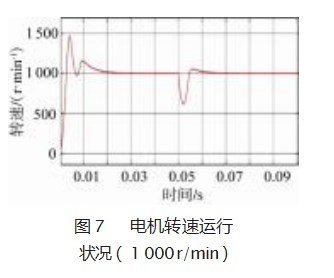
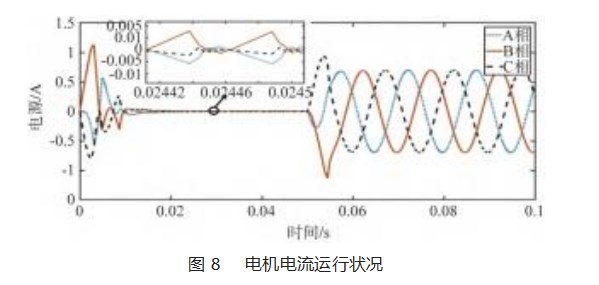
滑膜观测器用于负载低速启动控制效果不好,由于电机静止没有启动时,不产生电流,滑模算法无法观测;且低速状态,频率低,观测抖动值大,观测误差大。低速启动状态采用位置传感器,用传感器控制电机启动。图7所示为有感控制下1 000转速,电机速度跟踪效果。0.05 s时刻的波峰是增加了3 N·m负载,用于测试负载下系统运行的稳定性。
图8所示为电机1 000转速下,电机运行过程中三相电流状态,可以看出,在未加负载状况下,电机工作稳定,电流小,功率低;加负载后,电流功率接随之变大。仿真算法输出波形符合预期设计目标。
5结束语
相对于有传感FOC电机控制来说,无位置传感器滑模观测算法直接根据电机运行状态调节系统增益,不受外界噪声干扰,具有很强的鲁棒性。由于普通滑模观测算法无法适应低转速稳定性,本文将滑模观测算法加入有位置传感器FOC控制电机方案,实现电机低速负载启动,高速负载换向,免去高精度位置传感器的使用,降低硬件系统的复杂性和成本。本文通过MATLAB/Simu⁃link搭建算法模型,构建用来观测电机转子转速与角度的观测器,实现并验证了算法的有效性以及双位置系统的稳定性。观测器需要观测电机电流才能获得速度与位置,但电机不启动就没有电流,因此电机稳定低速启动的无感控制仍有待进一步研究。电机无感冷启动,提高低速观测精度是无感控制需要深入研究的方向。
参考文献:
[1]Abubakar Abubakar Ismaila,Khairulmazmi Ahmad,Yasmeen Sid⁃dique,Muhammad Aswad Abdul Wahab,Abdulaziz Bashir Kuta⁃wa,Adamu Abdullahi,Syazwan Afif Mohd Zobir,Arifin Abdu,Siti Nor Akmar Abdullah.Fusarium wilt of banana:Current update and sustainable disease control using classical and essential oils approaches[J].Horticultural Plant Journal,2023,9(1):1-28.
[2]Steven H.Collins,Andy Ruina,Russ Tedrake,and Martijn Wisse.Efficient bipedal robots based on passive-dynamic walkers.Sci⁃ence,307:1082-1085,February 18,2005.
[3]Wei Shyy,Yongsheng Lian,Jian Teng,et al.Aerodynamics of Low Reynolds Number Flyers:Cambridge Aerospace Series[M].Cam⁃bridge University Press,2008.
[4]Steven H Collins,Martijn Wisse,Andy Ruina.A three-dimension⁃al passive-dynamic walking robot with two legs and knees[J].In⁃ternational Journal of Robotics Research,20(7):607-615.
[5]Xiaodong Tian,Jose Iriarte-Diaz,Kevin Middleton,et al.Direct measurements of the kinematics and dynamics of bat flight[J].Bioinspiration&Biomimetics 2006,1:S10-S18.
[6]黄成成,金海,鲁文其.基于Super-Twisting无位置滑膜观测器的永磁同步电机控制[J].电子科技:1-7[2023-04-12].
[7]谭建成.无刷直流电动机换向分析和电流转矩解析表达式[J].微电机,2010,43(5):13-18.
[8]韩胜,席诗琼,耿卫东.基于FPGA的直流无刷电机新型控制系统设计[J].南开大学学报(自然科学版),2021,54(3):21-24.
[9]吴志伟.基于滑模观测器的直流无刷电机矢量控制系统设计与实现[D].南京:东南大学,2017.
[10]陈一豪.基于观测器的模块化机器人无传感器碰撞检测方法研究[D].长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所),2022.
[11]倪仕全.基于自适应滑模辅助干扰观测器的伺服系统力反馈控制[D].中国科学院大学(中国科学院长春光学精密机械与物理研究所),2022.
[12]刘志鹏,张安东.可换向无感FOC控制策略设计与功能实现[J].自动化博览2022 39(7):78-81
[13]王剑,力/力矩传感器在仿人机器人运动控制中的应用研究[D].长沙:国防科学技术大学,2003.
[14]辛旺根.无传感模型的下肢外骨骼关节主动控制研究[D].成都:电子科技大学,2019.
[15]刘志鹏,张安东.无感FOC中电机参数设定对电机输出效果影响研究[J].科技创新与应用,2022,12(4):79-81.
[16]赵一衡,顾伟康,陈亚彬,曹翔.无刷直流电机转子位置检测方法综述[J].机械研究与应用,2014,27(2):195-197,202.
[17]徐心怡.基于扩展滑膜控制器的PMSM无速度传感器探究[J].电子测试,2015(5):4-6.
[18]孙晓钰.永磁同步牵引电机转子磁极位置在线观测技术研究[D].大连:大连交通大学,2020.
[19]郭磊磊,王华清,代林旺,等.基于超螺旋滑模观测器的永磁同步电机无速度传感器控制方法[J].电力自动化设备,2020,40(2):21-31 34.
[20]许中阳,郭希铮,邹方朔,等.永磁同步电机无速度传感器控制离散化方法研究[J].电工技术学报,2019,34(S1):52-61.
[21]金爱娟,王居正,陈启超,等.基于滑膜观测器的无刷直流电机系统的设计[J].农业装备与车辆工程,2019,57(8):1-5.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/77274.html