摘要:根据对准确性与响应速度的要求,选用无刷电机作为摇杆的核心驱动部件,并建立了无刷电机的数学模型。选择了磁场定向控制(FOC)策略作为摇杆力反馈的核心算法。通过Clarke变换和Park变换进行坐标系转换,实现电机定子电流的解耦,Park逆变换和Clarke逆变换将电机定子的电流从控制坐标系转换回实际电机所需的三相信号,实现高精度和快响应的电机控制,为控制系统的设计提供了理论基础。对力反馈摇杆控制系统响应速度、稳定性和控制精度、力反馈体验等各个方面进行了测量和观察。测试结果表明,该力反馈摇杆系统在各项指标上均达到了预期效果,能够提供细腻、真实的力反馈体验。此次设计展示了无刷电机在力反馈控制系统中的应用潜力,并为未来的系统优化和应用拓展提供了一定的参考依据。
关键词:无刷电机,磁场定向控制,力反馈,摇杆
0引言
摇杆作为一种重要的输入设备,广泛应用于各类场景和设备,特别是在工业控制、机器人领域和电子游戏中尤为常见1·。作为关键的输入装置,摇杆在这些应用场景中不仅提供便捷和直观的操作方式,还能显著提高操作效率,增加控制精度并提升用户体验。
然而,随着科技的不断发展,虚拟现实(VR)、远程操作和仿真训练等新兴领域的快速崛起,传统的摇杆控制系统在面对这些新场景时显现出了一定的局限性。
尽管这些传统摇杆系统能够满足一定的控制要求,但由于受限于机械结构,它们只能被动地提供单一的弹性反馈,无法主动地为用户提供更加丰富和真实的力反馈体验。Statista数据显示,全球VR市场规模预计在2023年将达到492亿美元,反映了市场对高性能力反馈装置的巨大需求。MarketsandMarkets报告显示,全球飞行模拟市场预计在2025年将达到73亿美元,进一步表明了市场对高性能力反馈装置的迫切需求[4-6)
无刷电机具有无电刷、寿命长、运行可靠、响应快且高效、配合算法能实现扭矩的精准控制等特点,无刷电机控制系统成为了备受关注的新兴技术啕。通过先进的算法,无刷电机可以实现精准的力矩控制,为用户提供更加主动和多样化的力反馈体验。相较于传统的摇杆系统,无刷电机不再受限于机械结构,而是通过可编程的算法,能够根据不同的场景和需求,灵活地调整力反馈效果,使用户在操作中获得更为真实和细致的反馈感受11]
本文以磁场定向控制(FOC)技术为理论基础的无刷电机控制力反馈摇杆[12-15),主要研究:(1)磁场定向控制算法的推理与分析;(2)基于FOC算法的力反馈控制应用研究分析;(3)针对力反馈摇杆控制系统的硬件和软件设计;(4)基于FOC算法的无刷电机力反馈摇杆系统调试与分析。从以上4个方面提升摇杆装置的准确性与响应速度,为力反馈摇杆系统优化和应用的拓展提供了参考。
1设计方法原理
1.1电机FOC算法的数学模型的建立
通过坐标变换(克拉克变换和帕克变换),FOC将三相电机的定子电流分解为励磁电流分量和转矩电流分量,并采用直轴电流Id=0的控制算法进行FOC矢量控制,得到简化并优化的控制过程[5]。将简化优化后的FOC控制用于力反馈摇杆中,采用双无刷电机作为X-Y轴移动的核心部件,通过FOC控制驱动无刷电机,实现对摇杆的精确控制。
1.2力反馈摇杆控制系统的总体框架
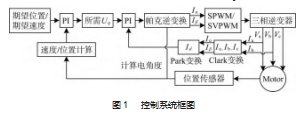
基于电机FOC算法的数学模型,设计出矢量控制的控制框架,如图1所示。首先通过位置传感器获取电机的转子位置和速度信息,并计算当前的电角度用于坐标变换。然后,通过Clark变换将三相静止坐标系的电流转换为两相静止坐标系电流,再通过Park变换将其转换为两相旋转坐标系电流[6]。在旋转坐标系中,使用PI控制器分别调节d轴电流(Id)和q轴电流(Iq),其中d轴电流设定为0,只需调节q轴电流来实现所需的转矩输出。接着,通过逆Park变换将调节后的电压转换回两相静止坐标系电压,并通过逆Clark变换转换为三相静止坐标系电压。最后,使用SPWM或SVPWM技术将三相电压转换为PWM信号,以控制三相逆变器,将PWM信号转换为实际的三相交流电压,从而驱动电机运行。
2硬件设计
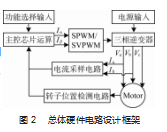
硬件总体架构组成如图2所示。系统由电源电路、ESP32主控制器、位置传感器、电流传感器和电机驱动电路构成。电源电路为系统提供稳定的电源;ESP32主控制器作为核心控制单元,负责处理传感器数据、执行控制算法并生成控制信号;位置传感器实时检测摇杆的位置并传输给主控制器;电流传感器监测电机的电流情况并传送至主控制器,以便实时调整电机运行状态;电机驱动电路接收主控制器发出的控制信号,调节电机的电流和电压,实现对无刷电机电机的精确控制[16-18]。通过这些硬件模块的紧密配合,系统能够实现对无刷电机的高效控制,确保力反馈摇杆系统的稳定性和响应速度。
3软件设计
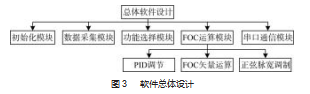
软件总体设计如图3所示[19-20],整体结构由初始化模块、数据采集模块、功能选择模块、FOC运算模块和串口通信模块5大模块组成。
(1)初始化模块。包括GPIO引脚设置、按键事件配置、无刷电机参数配置、PID参数设置和IIC通信配置等。该模块的主要任务是为系统运行做准备工作,确保各项硬件和软件参数正确配置。
(2)数据采集模块。主要实时采样定子三相电流和转子角度,以供FOC运算模块进行运算以及系统闭环。
(3)功能选择模块。提供多种模式选择,包括弹簧模式、有界棘轮模式、顺滑模式和阻尼模式等。根据用户选择的不同模式,系统执行相应的力反馈算法程序,满足不同的使用需求。
(4)FOC运行模块。FOC运算模块的主要任务是实现对电机的闭环控制。该模块由3个子模块组成:位置环、速度环和电流环的串级PID调节;FOC矢量控制;正弦脉宽调制。这些子模块共同协作,确保电机控制的精度和响应速度。
(5)串口通信模块。负责将系统各个数据通过串口传输到上位机软件中,方便监控与调试。通过该模块,用户可以实时获取系统运行状态,并进行必要的调整和优化。
4系统功能测试和分析
4.1硬件调试
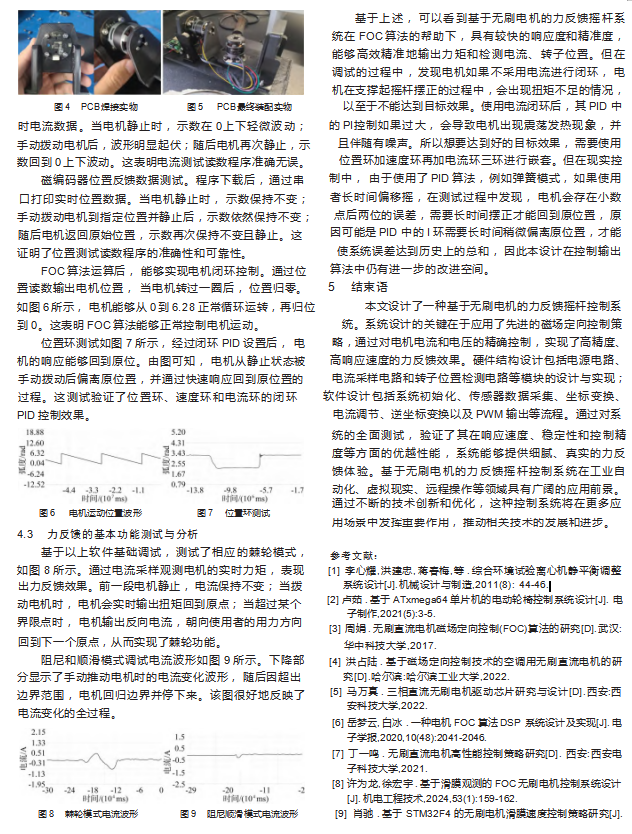
硬件调试部分分为元器件焊接以及机械组装,如图4所示。第1步,电源电路的测试,需测量各个芯片的工作电压是否正常,以及电源指示灯是否正常指示;第2步,检测ESP32主控芯片能否与电脑正常通信,以及下载程序;第3步,AS5600编码器和INA240读数检测;第4步,电机是否能在主控控制下根据FOC算法正常起转;第5步,进行整体摇杆的组装,如图5所示。经过组装测试后,经检测,各模块部分正常,机械装配无误。
4.2软件调试
软件调试包括电流检测读数测试、磁编码器位置反馈数据测试、FOC核心算法运算调试,最后进行系统组合调试。
电流检测读数测试。程序下载后,通过串口打印实
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/80692.html