SCI论文(www.lunwensci.com)
摘要 :针对当前常规动态旋流器控制精度低, 分流效果差等问题, 设计了一种基于 STM32 的新型动态旋流器控制系统, 分别对其 硬件及软件进行设计与实现 。该系统以直流无刷电机 (BLCD) 作为动力源, 采用六步换向的方波驱动策略, 以 PWM 技术调制电 机转速, 通过 PID控制器实现对目标旋流速度快速 、准确 、稳定地闭环跟踪, 并提供可视化的 PID 参数整定界面, 极大缩减了操作 者获得最优控制品质的时间 。为验证该控制系统的可行性, 分别设置了电气系统速度闭环测试实验和油水分离实验, 通过数值模 拟方法分析了电气系统参数和操作参数对油水分离效率的影响 。 实验结果表明, 该系统可实现对目标转速的精确控制, 且随着叶 轮转速提高, 装置分离效率呈现先增大后减小的趋势, 当转速在 842 r/min 时, 对 4 种不同比重的油水混合液的分离效率均达到最 高, 为 85.9%。
Design of a New Dynamic Hydrocyclone Electrical System Based on STM32
Xu Zhenxing1. Wang Xinqing1. Li Chenghao1. Geng Hao1. Li Wenchuan1. Li Xuejiang2.
Zhang Junhua2. Teng Xingbao2
( 1. College of Mechanical and Electrical Engineering, China University of Petroleum (East China), Qingdao, Shandong 266580. China;
2. Shandong Weima Pumps Manufacturing Co., Ltd., Laiwu, Shandong 271199. China)Abstract: Aiming at the problems of low control precision and poor diverting effect of the current conventional dynamic hydrocyclone , a new dynamic hydrocyclone control system based on STM32 is designed, and its hardware and software are designed and implemented respectively.The system uses the brushless DC motor (BLCD) as the power source, adopts the six-step reversing square wave driving strategy, modulates themotor speed with PWM technology, realizes the fast, accurate and stable closed-loop tracking of the target swirl speed through the PID controller, and provides the visual PID parameter setting interface, which greatly reduces the time for the operator to obtain the optimal control quality. The experimental results show that the system can achieve accurate control of the target speed , and with the increase of the impeller speed, the separation efficiency of the device increases first and then decreases . When the speed is 842 r/min, the separation efficiency of the four kinds of oil-water mixture with different specific gravity reaches the highest, 85.9%.
Key words: new hydrocyclone; STM32; PID; control system
0 引言
近年来, 我国油田开采已进入高含水期, 油田污水 的处理成为一个亟待解决的问题 。为解决含油污水对环 境的污染问题, 同时提高原油采收率, 需要研究更高效 的油水分离设备 。 目前采用的静态旋流器在分离油水过 程中存在效率低 、能耗高 、控制精度低 、分离效果差等 缺点[1] 。为了提高油田污水的分离效率, 动态旋流器得 以 广 泛 应 用 和 发 展 。 动 态 旋 流 器 (Dynamic Hydrocy‐ clone) 采用了离心原理, 利用转筒内的流体由于黏性剪 切作用而产生高速旋流的强离心场, 使混合液发生高速 旋转运动, 利用油水之间的密度差将两者分离, 是一种 高效的油水分离方式, 其具有效率高 、流场稳定 、结构 紧凑等优点[2-3] 。因此, 对动态旋流器控制系统的设计和优化成为研究的重点。
通过对动态旋流器油水分离系统的功能需求分析, 整个系统运行时需要对旋转电机进行控制 。作为动态旋 流器的动力源, 旋转电机是整个动态旋流器的核心部件, 也是决定油水分离效果的直接因素, 本文基于新型动态 旋流器功能需求, 设计新型动态旋流器的 PID 闭环驱动 控制系统, 以微控制器 STM32F103RBT6 作为核心处理 器, 先后完成硬件 、软件的设计与实现, 该控制系统具 有响应速度快 、控制稳定 、可视化等优点, 并通过电气 系统的速度测试实验和旋流器油水分离实验, 证明此电 气系统有效且能满足旋流器的要求。
1 硬件系统的设计
新型动态旋流器旋转速度是重要的操作参数之一,设备运行期间需要根据工艺要求以一定的转速稳定旋转。 为实现对目标转速快速 、准确的跟踪响应, 本文选用调 速性能优 、工作效率高 、运动稳定性好的直流无刷电机 ( BLDC ) 为动力源, 以 STM32 为核心控制器, 通过梯形 方波控制算法对 BLDC 的速度伺服控制, 完成精准调速。 同时以 PC 做上位机, 设计操作界面, 通过串口建立与主 控制器的通信, 实现人机交互功能[4] 。系统的总体硬件 架构如图 1 所示。
直流无刷电机选用 57BL75S10 系列电机, 工作电压 12 V, 该电机集成霍尔传感器, 可通过主控制器定时器 的输入捕获功能测量其位置 、速度 、实现闭环控制, 其 体积小, 成本低, 性能较好[5], 可以满足新型动态旋流 器的驱动要求, 其主要功能参数如表 1 所示。
主控制器的具体型号为 STM32F103RBT6. 基于 Con‐ tex-M4 内核, CPU 最高频率可达 168 MHz, 拥有两个高 级定时器和 10 个通用定时器, 可以产生 6 路脉宽调制信 号, 经过隔离逆变电路, 控制 6 个 MOSFET 的通断, 实 现对电机三相绕组的转换通电, 驱动直流无刷电机转动。 同时通过采样电路实时采集电机的相电流信号, 为伺服 控制算法提供硬件基础[6-7] 。本设计中主要功能的 IO 占用 设计如表 2 所示。
驱动器主要由驱动电路 、隔离电路 、位置检测电路、 电流采样电路等组成, 驱动电路采用驱动芯片 IR2101S, 设计工作电压为 12 V 该芯片支持单路的互补输入和互补输出, 响应速度和控制性能优异, 可以实现本设计的要 求 。 电流采集采用三电阻采样的方案, 为了降低采样电 阻对逆变电路的影响[8], 选用 1% 精度的 20 mΩ 做采样电 阻, 其功率上限为 2 W, 采用差分放大电路进行采样 。 图 2 所示为以 U 相桥为例的直流无刷电机驱动电路。
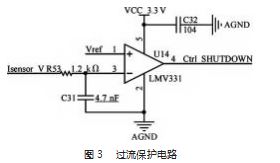
在整 个 控 制 系 统 中, 存 在 各 种 因 素 对 控 制 电 路 、 驱动电路甚至电机造成伤害, 因此在电路设计中加入 保 护 电 路 是 非 常 必 要 的 。在 图 3 所 示 的 保 护 电 路 中, 当控制器监测到系统的电流超过预先设定的值, 会自 动触发中断, 停止产生 PWM 信号, 关停电机, 直到 故障排除[9] 。
为实现上位机与主控制器的通信, 还需设计串口转 USB 电 路, CH340G 芯 片 中 的 TXD 、 RXD 分 别 与 STM32F407IGT6 的 USART_RXD 和 USART_TXD 相连接, UD+和 UD-是 USB 信号接口, 直接连接到 USB 总线的DP 和 DN 。以次实现 USB 与串口转换, 该通信电路最大可支 持 2 Mb/s 的通信波特率 。如图 4 所示 。
根据上述各主要模块的电源需求, 驱动板卡设计以 12 V 直流电源输入, 经二级稳压电路分别降压至 5 V、 3.3 V 给各模块供电 。综上, 完成了新型动态旋流器驱 动控制系统主要电路设计, 驱动板卡的最终效果如图 5 所示。
2 软件系统的设计
驱动软件在 Keil5 中使用 C 语言进行嵌入式开发, 主 要实现直流无刷电机 ( BLDC ) 速度的闭环控制和与上位 机交互的两大功能, 除全局软硬件初始化外, 其余软件 功能大多在相应外设的中断函数中实现 。软件设计架构 如图 6 所示。
2.1 主程序
主程序的设计主要包括全局硬件模块的初始化, main 函数的编写, 大循环的流程逻辑开发等 。初始化包括对控制器 IO 口以及板载外设的配置, 自定义结构变量的初始化等, 初始化完成之后进入大循环等待中断的发生, 同时完成和上位机的实时通信, 根据通信协议解析接收到的上位机指令, 执行相应的操作 。整个主程序的控制流程 如图 7 所示。
2.2 BLDC 速度的闭环控制实现
以三相六臂全桥驱动电路来驱动无刷电机, 其控制 核心是获取当前电机转子位置, 决定导通哪两相励磁绕 组, 激励电机持续旋转 。本文所选电机带霍尔传感器, 需要根据厂家给出的霍尔传感器和励磁绕组情况对应表, 设计 BLDC 的六步换向控制算法 。本设计中霍尔真值表 和导通相对应关系如表 3 所示[10]。
电机运行过程中, 使用控制器 TIM 的输入捕获功能, 获得当前霍尔传感器的真值情况, 并根据表编写换向中 断回调函数, 在换向中断回调函数中 MCU 发出产生驱动 相应相的脉宽调制信号 ( PWM ) 驱动电机旋转, 通过设 置 PWM 信号的占空比, 可以实现电机的转速控制, 最终 的脉宽调制控速时序如图 8 所示。
为满足新型动态旋流器的工作需求, 还需要对速度 进行闭环控制 。本文使用经典的增量式 PID 控制算法, 消除当前转速与目标转速之间的误差 。PID 控制器的控 制品质是由比例 、积分 、微分 3 个调节参数以及控制周 期决定的, 为了方便 PID 参数调节, 编写了 PID 整定函数, 可通过上位机发送相应的数据帧调用并设置 PID 参 数, PID 控制器在基本定时器的定时中断函数中调用, 在工作过程中每 50 ms 进行一次 PID 运算, 根据误差情况 改变驱动信号的脉宽, 实现 BLDC 速度的闭环控制[11]。 控制逻辑如图 9 所示。
2.3 上位机
上位机调试软件是新型动态旋流器控制系统中不可 或缺的部分, 由于旋流器采用直流无刷电机作为动力源, 通过 PID 控制器跟踪目标转速, 在工业现场中, 为了获 得品质较好的 PID 参数, 往往需要大量的调试实验 。上 位机开放了 PID 整定接口, 可以实现便捷调参, 省去了 PID 参数整定的繁琐环节, 有效提高系统的应用效率。
上位机软件基于 Qt 开发, 通过串口与主控制器进行 通信 。主要包括串口配置 、PID 控制器设置 、电机控制 3 大功能区, 以及旋流器工作状态的显示区 。建立通信 前需要设置好与主控器匹配的波特率, 选择对应的 COM 口 。通信建立之后可先后设置并发送 PID 参数和目标转 速, 点击启动, 旋流器即以目标转速开始工作 。显示窗 口显示了电机当前转速以及测得的旋流器工作中输入输 出的流量情况 。整个操作界面如图 10 所示。
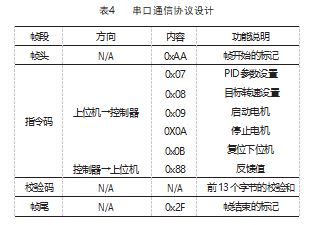
基于上位机的功能需求, 设计串口通信协议, 协议 规定一帧数据为 16 个字节, 帧头 、帧尾 、指令码 、校验 码各占一个字节, 上位机每个功能都对应一个指令码, 指令码后接 12 个字节的参数值, 对于没有用到的字节位, 统一规定使用 0X55 填充 。协议的具体规定如表 4 所示。
3 测试实验
3.1 电气系统的速度闭环测试
动态旋流器驱动电机工作质量好坏, 主要取决于 PID 控制器参数的设置, 在实际的应用中, 往往是通过 试凑法来确定 PID 参数, 这导致 PID 参数的整定工作效 率极低, 本文设计的上位机软件提供了便捷的调试接口, 可以通过实验设计, 实时检测系统输出的响应时间和响应的准确性, 较快得到优秀的 PID 参数值 。实验设定目 标转速为 3 000 r/min, 根据各环节特性依次进行整定, 力求 PID 控制器响应快, 误差小, 稳定性高[12]。
比例环节能较快地对误差进行反应, 但比例系数太 大可能会造成系统震荡, 破坏系统的稳定性 。为确定合 适的比例系数, 先将 I 、D 环节置 0. 由小到大逐渐增加 比例环节系数 。 比例环节太小, 无法消除稳态误差, 太 大又会引起系统振荡, 破坏系统稳定性 。最终以导致系 统开始振荡的比例系数值的 0.8 倍作为 PID 控制器的比例 系数。
比例系数确定后, 增加积分环节来消除静态误差, 将设置比例系数 Ki=0. 1. 可以看到稳态误差基本可以消 除, 但系统的响应速度明显变慢, 将比例系数加大至 0.5. 基本可以达到理想的控制效果。
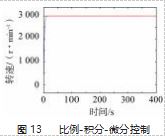
最 后 增 加 微 分, 避 免 超 调 现 象, 减 小 系 统 的 振 荡, 提 高 系 统 的 稳 定 性 。 实 验 中 微 分 系 数 KD 由 0. 1 增加至 0.5. 结果 显 示, 当 KD=0.4 时, 可 以 达 到 较 为 理 想 的 控 制效果, 如图 13 所示 。整定后的 PID 控制器, 可以快速消 除电机输出转速与目标转速之间的误差, 且未出现震荡、 超调等不稳定现象, 控制品质良好, 为新型旋流器的工 作可靠性提供了可靠的前提。
3.2 油水分离实验
动态旋流器工作时, 电机启动, 带动主轴转动, 从 而带动齿轮传动机构运动, 使 4 个动态旋流器同时转动。 混合液从进口管道进入进液箱, 沿装置的进液口分别流进 4 个动态旋流器的转筒, 经过旋转栅后产生预旋, 同时,转筒内的流体由于黏性剪切作用而产生高速旋流的强离心 场, 使混合液发生高速旋转运动, 重相液体和轻相液体由 于存在密度差而产生分离, 分离后的轻相液体经溢流口进 入轻相集液箱, 最终沿轻相出口管道流出装置; 重相液 体进入重相集液箱, 最终沿重相出口管道流出装置[13- 14]。
3.2. 1 实验装置及方法
实验装置由新型动态旋流器样机 、上位机 、硬件控 制系统 、直流无刷电机等组成 。以油水比为 49% 的混合 液为对象, 通过基于 STM32 的分级控制系统调节电机转 速, 进而控制旋流器转速; 通过调节进油口阀门的开启 度来改变进油口流速 。测量不同条件下旋流器的油水分 离效率[15]。
3.2.2 实验结果与分析
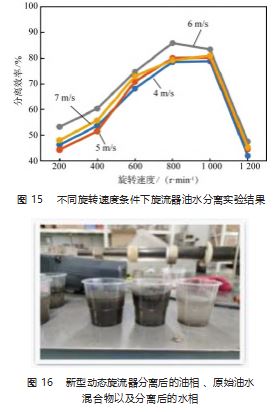
在转速为 200 、400 、600 、800 、1 000 、1 200 r/min 的条件下, 以不同进油流速进行对比实验 。如图 15 ~ 16 所示 。由图 15 可知, 动态旋流器在旋转速度为 800 r/min, 进 油 口 流 速 6 m/s 的 条 件 下 分 离 效 率 最 高, 可 达 到 85.9%, 其中最大误差为 1.7%。
4 结束语
本文采用 STM32 单片机作为核心控制器, 以直流无 刷电机作为动力源, 通过 PID 控制器实现了对旋转电机 的稳定控制, 设计出了一套稳定可靠的新型动态旋流器 电气系统, 并提供可视化的 PID 参数界定界面, 缩短了 操作者获得最优品质的控制时间, 该电气系统解决了以 往旋流器中存在的动态响应慢 、控制精度低等问题, 将 该系统应用于新型动态旋流器能显著提高含油污水的油 水分离效率, 在一定程度上, 在减少原油资源的浪费的 同时, 降低油水混合物对环境的污染 。 由实际实验可知, 该系统适应性强, 动态响应快, 稳定性好, 能够保证新 型动态旋流器达到较好的分离效果 。若对动态旋流器结 构和参数进行适当优化, 分离效率能进一步提高。
参考文献:
[1] 詹敏,刘敏,杨万有,等 . 一种新型导叶式油水分离器[J]. 石油机 械,2020.48(9):101- 106.
[2] 武金辉,巩志强,王振波,等 . 含油污泥分离技术研究进展[J]. 应 用化工,2021.50(3):793-800.
[3] 杨兆铭,何利民, 罗小明,等 . 柱状旋流器在油水分离领域的研 究进展[J]. 石油机械,2018.46(3):57-64.
[4] 李万义,谢林汐, 肖锋,等 . 基于 STM32 的智能小车寻迹避障系 统硬件设计[J]. 电子世界,2019(7):196- 197.
[5] 施志荣 . 基于 STM32F407 的无刷电机调速系统设计[J]. 九江 学院学报(自然科学版),2022.37(2):27-30.
[6] 孙书鹰, 陈志佳,寇超 . 新一代嵌入式微处理器 STM32F103 开 发与应用[J]. 微计算机应用,2010.31(12):59-63.
[7] 胡泽华 . 基于 STM32F429 的嵌入式显示控制系统设计[J]. 无 线互联科技,2016(8):63-64.
[8] 桑勇,李锋涛,代月帮 . 面向伺服电机的 STM32 单片机控制系 统设计[J]. 机电工程技术,2015.44(11):65-72.
[9] 童宏伟, 张莉萍, 申景双,等 . 基于 STM32 的无刷直流电机控制 系统[J]. 传感器与微系统,2019.38(7):79-81.
[10] 熊浩 . 开关电源过流保护电路设计[J]. 江苏科技信息,2019.36 (1):49-51.
[11] 房舟,黄崇莉,徐永帅,等 . 基于 PID 算法摩擦焊机移动速度闭 环控制系统研究[J]. 机床与液压,2020.48(4):29-32.
[12] 刘旭辉, 简震, 张远方,等 . 直流电机闭环控制系统设计[J]. 化 工自动化及仪表,2020.47(5):375-379.
[13] 许雪 .PID 参数工程整定方法研究[J]. 中国氯碱,2016(9):44-46.
[14] 刘培启,周运志,任帅,等 . 一种双叶轮动态旋流分离器的分离 性能[J]. 石油学报(石油加工),2018.34(2):299-306.
[15] 刘培坤,姜兰越,杨兴华 . 锥形溢流管旋流器分离性能研究[J]. 中国矿业,2016.25(6):129- 132.
[16] 邢雷,李新亚, 蒋明虎,等 . 适用于超低进液量的微型水力旋流 器结构优化[J]. 机械工程学报,2022.58(23):251-261.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65080.html