SCI论文(www.lunwensci.com):
摘 要 :从铝电解生产计算机监控系统发展情况来看,其在发展的过程中已经由最早期的集中型发展逐渐的发展到集散型,而 伴随着计算机等技术的进一步发展,其技术发展更加的具有系统性,逐渐的走向分布式系统。而针对 CAN 总线的分布式铝电解 控制系统进行研究,则能够在较大程度上解决现阶段铝电解生产过程中监督系统的设计与应用问题,提升集中控制的时效性。 本文在研究的过程中将从 CAN 总线的分布式铝电解控制系统的设计与实现方法进行简单的阐述与分析。
关键词 :CAN ;铝电解控制 ;控制系统
在时代不断发展的过程中,人们对于机械的使用重视程度 越来越高, 也对现有的机械进行不断的改进与完善, 使机器能够 在最大程度上提升人们的工作效率, 解放人们双手。而伴随着时 代的发展,计算机技术也在不断的改进与完善,在这种情况下, 人们将计算机智能化技术应用于现阶段的工业发展中,极大程 度上提升现阶段工业发展质量与效率。在这种环境之下, 相关的 人员对现有的铝电解生产技术进行改进与优化,更好的将智能 化技术与现阶段的铝电解生产技术相互融合,使其能够在现阶 段人们的生产活动中起到更好的应用效果。
1 概念阐述 1.1 CAN 总线
1.1.1 CAN
CAN 又被称为控制器局域网络 , 其最早产生于德国BOSCH 公司,主要应用于汽车电子产品之中。而伴随着时代的发展,其 技术在不断的发展与完善,现阶段 CAN 总线已经成为国际中应 用最为广泛的现场总线之一, 而在北美与西欧等地区, 其协议也 成为了汽车计算机控制系统和嵌入式工业控制局域网络的标准 总线。
1.1.2 CNA 总线特点
控制器局域网络在现阶段我国工业发展过程中有着极为重 要的作用,而且在实际应用的过程中,自身的特点主要表现在 5 个方面。第一,完成对通信数据的成帧处理,其在实际应用的过 程中能够通过协议的物理层以及数据链路层功能,对通信数据 进行成帧处理工作,更好的进行数据优先级别的判定。第二,是 网络内节点个数在理论上不受到限制,CAN 协议在实际应用的 过程中最为重要的特点之一是其废除了传统的地址编码,利用 通信数据块进行编码,这种方式也造就其在实际应用的过程中 并没有传统网络内节点数量的限制。第三, 可在各个节点之间实 现自由通信,CAN 总线在实际应用过程中采取了多种竞争总线 结构 , 这种结构造成其在实际应用的过程中具有多主站运行,分散仲裁的串行总线以及广播通信的特点。各个节点可以按照自 身的实际需求,不分主次的向其他节点发送相应的信息,进而 实现各个节点之间的通信自由。第四,结构简单,相比于其他方 式而言, 其在实际应用中仅仅有两根线与外界进行连接, 而其线 路内部存在错误探测与管理模块, 以保证其能够顺利的运行。第 五,传输距离与速率。从数据通讯角度上来说,数据通信没有主 次之分, 可以从任意一个节点向其他节点进行数据通讯, 而各个 节点在进行数据通讯的过程中,会采取信息优先等级进行通讯 次序的确定,优先级高的节点甚至可以达到 134μs,而在信息传 递的过程中, 如果出现多个节点同时发起通信的情况, 优先级低 的会主动停止数据发送避让优先级高的,在这种情况下通讯线 路不会出现拥堵情况。而从传输距离角度上来说, 其传输距离最 远可达到 10千米, 而传输速率可以达到 1MBps。
1.1.3 CAN 总线应用优势
控制器局域网络的优势基本表现在 3 个方面。第一,网络各 个节点之间数据通讯实时性较强。首先从各个等级的数据来说, 现在进行信息传递的过程中,会根据数据的优先等级采用无损 结构的逐位仲裁的方式竞争, 向总线发送数据。而这种方式与传 统的方式不同, 其次废除了原来的站地址编码, 而使用通信数据 进行编码,这种方式也造成其在实际应用的过程中能够使不同 的节点同时接受通信数据, 增强数据通信的实时性, 提升系统的 可靠性与灵活性。第二,开发周期较为短暂。控制器局域网络在 实际应用的过程中,不会出现多个节点会同时向总线发送数据, 造成总线呈现短路状态,进而损坏某些节点。而 CAN 节点在出 现严重错误的情况下, 会自行的关闭自身的输出功能, 降低受损 节点对其他节点的影响,进而降低了由于单个节点的问题影响 总线运行情况发生的概率。第三,已是标准化现场总线。相比于 其他的方式而言,控制器局域网络在实际应用的过程中发展的 时间较为长,发展较为完善,且其具有通信速率高,容易实现, 性价比较高等优势, 造成其在市场中更具有竞争力, 也成为现阶 段国际标准的现场总线之一。
铝电解生产 :铝电解生产系列是由多台直流铝电解槽串联 组成。计算机数据采集信号为每台电解槽槽电压和系列电流 ,对 电解槽的监控主要是槽电压和氧化铝浓度。槽电压控制是采用 带电流补偿的槽电阻数学模型控制算法 , 即调节槽电压 , 主要控 制槽内的能量平衡 ;对于氧化铝浓度的控制 , 由于该浓度无法直 接测定而无法建立精确的数学模型。但是它和槽电阻的变化有 一定的对应关系 , 为此采用模糊控制算法控制氧化铝浓度 , 即通 过打壳下料来主要控制电解槽内的物料平衡。
铝电解智能控制 :但随着时代的发展,人们对于智能化控 制的重视程度在不断的提升,而将智能化技术应用于现阶段共享中是现阶段我国发展中的重点工作之一,铝电解智能控制在 实际应用的过程中需要保证其按照控制的原则以及控制内容进 行控制工作, 才能够在最大程度上保证槽控机运行的稳定性。
1.2 控制原则
比于一般的工业生产过程而言,铝电解的车间环境更加 的恶劣,因而对于铝电解的要求更加的高,一般情况下,铝电解 智能控制在实际运行的过程中需要遵循以下几方面的原则 :首 先要求铝电解智能控制在实际应用的过程中具有较高的较为清 晰的层次划分。其次需要保证智能控制系统的全面性, 在进行智 能系统设计过程中需要尽可能的从多个角度出发,进行智能控 制系统的设计,保证铝电解槽运行过程能够受到更加全面的监 督与管理,进而保证其运行质量。最后需要保证其可持续发展 性,伴随着时代的发展,相关的技术、理论等也在不断的进行发 展与完善, 在这种情况之下, 要求铝电解智能控制需要伴随着时 代的发展,积极的进行新技术,新理论的引入,进而保证其能够 紧跟时代发展的潮流, 保证自身发展的活性。
1.3 控制内容
为保证铝电解能够顺利的完成,需要按照实际情况设置相 应的主控模块, 而且主控模块只需要设置相应的功能模块, 如较 为常见的数据处理模块、屏幕显示模块、故障处理模块、打印模 块、控制模块、输出模块等。进而需要对每一个模块进行更加细 致的划分, 如可以将数据处理模块分解为模拟数据采集, 开关量 数据采集, 数据滤波三个模块, 而将故障处理模块可以细分为黏 连故障,越线模块,阳极效应模块故障,热槽故障,并槽故障, 系列电流异常等模块。而控制模块需要分成常规控制, 出铝函数 控制, 阳极转接函数控制几个部分。
控制流程 :从其控制流程角度上来说,首先需要启动相应 的软件,调动初始化模块,之后通过登录窗口进入主窗口,进而 进入到子模块中, 在实际运行中的主模块分别为控制模块, 故障 处理模块,打印模块,退出模块,数据出铝子模块等。其子模块 是由控制子模块进行统一的管理,控制子模块在实际应用中能 够对故障处理子模块,数据出铝子模块,推出子模块进行控制, 而故障子模块能够对打印子模块以及推出子模块进行控制,数 据出铝子模块能够对推出模块进行处理。
槽控机电路技术要求 :槽控机在实际应用的过程中,对于 其电路有以下几方面的要求。第一, 为保证槽控能够更加顺利的 使用, 要求槽控机的逻辑拥有自动和手动功能, 在出现问题时能 够进行手动操作。第二, 线路在实际应用的过程中需要有动作保 护,以及软硬件两方面的保护,提升设备使用的安全性,保证应 急动作能够按照要求准确的实施。第三, 要求槽控机在实际应用 的过程中能够具有自我诊断功能,槽控机在使用中如果出现故 障,能够将其故障通过线路反映于槽控机的显示面板中, 并能够 向上级计算机进行反馈,具有选择性的向外界传递其故障信息, 为维修管理人员提供更加精确的数据。
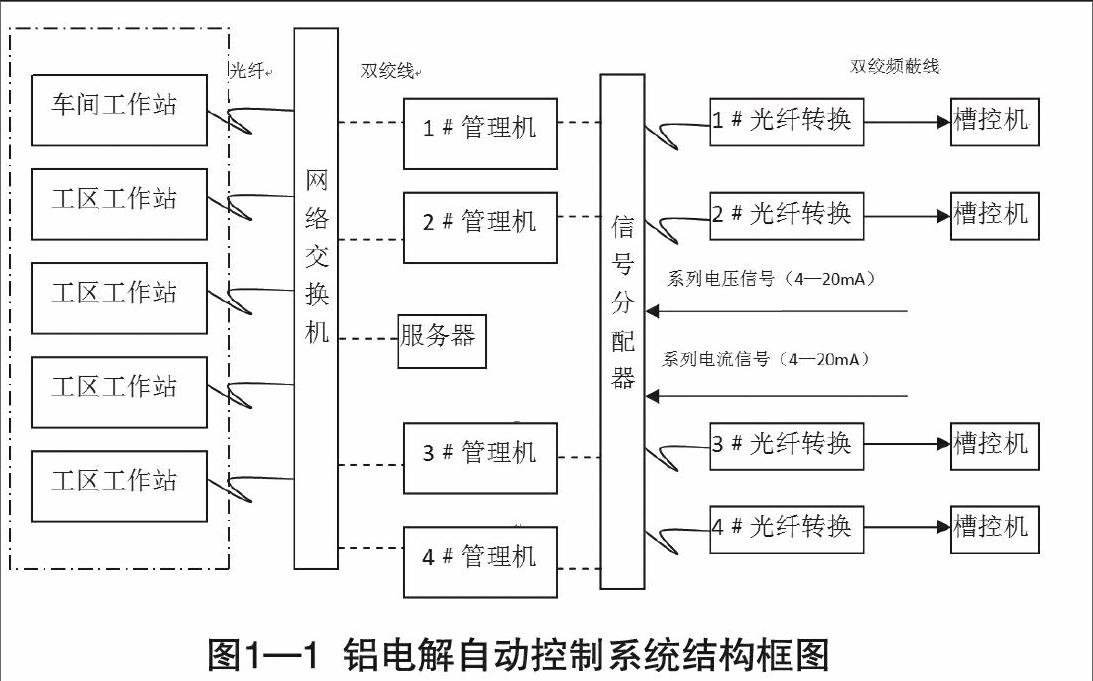
结构系统研究 :本文所研究的系统,在实际应用的过程中 是由智能槽控机, 监控管理计算机以及CAN 总线三部分所组成。 其中监控计算机主要对 CAN 总线进行监控,而 CAN 总线将智 能槽控机与监控计算机进行连接。从功能角度上来说智能槽控 机在实际应用的过程中,主要是进行信息的采集以及信息的控 制,通过 CAN 总线网络将所收集的数据传递到监控计算机中, 而监控计算机则对所收集的数据进行分析,为智能槽控机参数 设置提供一定的数据支持。以及在系统运行的过程中能够对运 行中的异常数据进行监控。CAN 总线是由智能总线通讯适配卡 PC CAN、通讯介质以及相应通讯软件组成。CAN 接口卡是具有高性能价格比的智能通讯适配卡PCCAN, 它使监控管理计算机 方便地连接到 CAN 总线上。而PCCAN 中的嵌入式微处理器在 实际应用的过程中也能够在较大程度上降低主机的负担,更高 效的完成部分复杂的通信任务。
智能控制基槽设计 :槽控机在实际应用的过程中首先需要 按照其实际情况进行单片机的选择,本文在研究过程中所选择 的是Intel 公司的 386EX CPU 芯片,其在实际应用中的优势表现 在,发展时间较长各方面发展较为完善。而从槽控机的构成角度 上来说,槽控机在实际应用中的主要构成部分由动力箱以及逻 辑箱所组成, 而两者在实际应用中的功能也存在一定的不同, 动 力箱在实际应用中主要是进行常规电路的控制。而逻辑箱在实 际应用的过程中功能较为复杂,可以说是一个复杂的专用计算 机,也是槽控机的核心部分。主要是由几块带有不同功能的相对 独立的智能模板所组成,而不同模板之间是通过PC104 总线和 串口进行连接。分别为 CPU 板部分,在实际应用的过程中在主 要是进行控制解析 ;逻辑大板部分,在实际应用的过程中主要 是进行继电器驱动、提供直流定时器、显示数码驱动、提升机安 全保护、光隔输出等功能 ;输入隔离板部分是对输入信号与系 统进行隔离,防止外部高电压等对内部的冲击 ;智能打壳板部 分是对打壳气缸进行智能控制 ;操作开关板部分,在实际应用 中主要是进行手动指令工作 ;状态数码显示板部分,在实际应 用中主要是进行信息的显示。
CAN 通信软件设计 :从其通讯软件设计角度上来说,其结 构设计可分成物理层, 数据链接层以及应用层三个层面, 而前两 者在设计以及应用的过程中需要依托于 CAN 总线,其中最为重 要的是硬件线路以及通信协议两方面的内容。从协议角度上来 说,CAN协议在实际应用的过程中主要是通过网络通信数据帧、 远程帧、错误帧以及超载帧四个组成部分进行系统的控制与运 行,而其系统在实际运行的过程中首先是由各种通信数据帧进 行数据的传递与接收, 之后通信控制器在接收相应的信息后, 将 其发送给总线上,总线在进行信息的接收后,信息通过 CPU 继 续进行传递,CPU 即可通过接收 / 发送缓存区向物理总线接收 和发送数据。
2 结语
基于 CAN 总线的分布式铝电解控制系统在实际应用中能够 在较大程度上提升电解槽生产的高效控制,进而保证其能够更 加稳定平稳的运行, 提升系统运行整体质量与效率。而从另一方 面来说,其系统的高效使用也能够在极大程度上提升系统集成 化、智能化程度,进而使系统在应用中安全性更高,更具有可靠 性。故而, CAN 总线在实际应用中具有着较为突出的优势, 具有 推广以及应用价值。
参考文献
[1] 郑店坤 , 许同乐 , 连瑞德 , 等 . 基于CAN 总线的分布式监测预警系统设计 [J]. 电 测与仪表 ,2019,056(004):37-42.
[2] 徐克圣 , 闫晓鹏 . 基于 CAN 总线区域分布式充电桩建设布局的设计 [J]. 福建质 量管理 ,2018,000(009):250-251.
[3] 苏宁焕 . 基于CAN 总 线 的模 块化 UPS 并 联 控 制 策 略 [J]. 西 安 工 程 大 学 学 报 ,2018,032(006):691-696.
[4] 宋辉. 基于CAN 总线分布式伺服系统研究 [J].舰船科学技术,2018,40(21):148-151.
[5] 过怡 , 孟令康 , 钟宇辉 , 等 . 基于 CAN 总线的智能车控制系统的设计 [J]. 电脑与 信息技术 ,2020,028(001):17-20.
[6] 崔晓琳 . 基于CAN 总线的底盘综合控制系统设计 [J]. 微型电脑应用 ,2020,v.36;No.323(03):88-90.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/35687.html