SCI论文(www.lunwensci.com)
摘要:为使无人机同时具有空中飞行与水下航行 2 种功能, 将水下航行装置加装在传统飞行功能的无人机上 。开创性地设计蛋壳 状外壳, 大大减小飞行或者航行时的阻力 。无人机由空中飞行模块 、水下航行模块与飞控系统 3 个模块组成; 在 MDK 环境下采用 KeilµVision5 软件结合 C 语言编写程序, 利用 Proteus 8.6 软件对 STM32F103T6 芯片进行设计 。采用 Flyeval 平台进行飞行模拟测试, 收集最大前飞速度 、单程飞行距离等各项飞行数据 。结果表明: 该无人机具备优良的飞行和水下作业能力, 结合了飞行器和潜水 器的功能, 解决了无人机无法在多种环境下作业的难题, 实用性强 、性价比高。
Design of Submersible Water-air Dual-purpose UAV Based on STM32 Microcontroller
Li Xin, Guo Shuguo ※, Li Meng, Wu Lei, Du Jiaxing
(School of Mechanical and Power Engineering, Shenyang University of Chemical Technology, Shenyang, Liaoning 110142. China) Abstract: In order to make the unmanned aerial vehicles (UAVs) have two functions of both air flight and underwater navigation, the underwater navigation device was installed on the UAVs with the traditional flight function. The eggshell shaped shell was designed to reduce the resistance during flight or navigation. The UAV structure was divided into three modules, such as air flight module, underwater navigation module, and flight control system; flight simulation tests were conducted on the Flyeval platform, various flight data were collected, such as maximum forward flight speed and one-way flight distance. The test results show that the UAV has excellent flight and underwater operation capabilities, combined with the functions of aircraft and submersible, and solves the problem that the UAV cannot operate in various environments. It is highly practical and cost-effective.
Key words: water and air dual use UAV; optimization method; multi-slurry collaboration; application advantages
0 引言
四旋翼无人机是多旋翼无人机的一种, 是目前无人 机的主流结构, 具有响应快 、操作便捷等优点, 受到了 国内外无人机爱好者的青睐, 并且在地形勘测 、搜救、 侦察等领域发挥着重要作用[ 1] 。然而, 目前市面上的无 人机功能较为单一, 大多数无人机只具有空中飞行功能, 而不具有潜水功能, 导致无人机在作业时会受到极大的 环境因素限制 。 目前, 只有水上飞机能够执行水空两栖 侦察 、运输的任务, 但是水上飞机是针对空中飞行研制 的, 在水上航行状态下速度较慢 、抗风浪能力较差且无 法长时间航行 。随着航空和航海技术的发展, 既能在空 中长时间巡航执行侦察和监视任务, 又能在水下高速航 行执行搜救和隐蔽突击任务的水空两栖飞行器是未来的 一个发展方向。
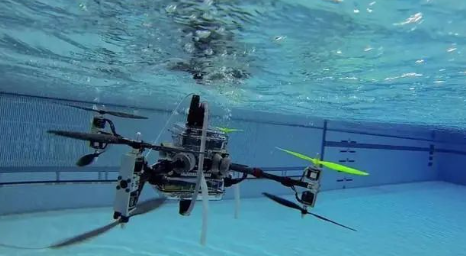
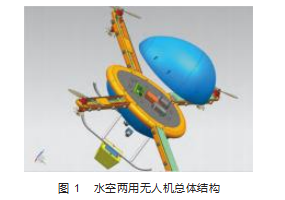
为此, 本文提出一种新型无人机的设计方案 。在传 统无人机的基础上于四旋翼的支架下方增添 4 个涡轮桨,用于水下航行, 同时创新性地提出蛋壳结构的舱体, 可 以更大限度地承受水压 、减小无人机工作时受到的阻力, 还可以将舱体下部用作储水装置, 通过水泵从舱体下部 将水吸入或排出以实现无人机在水中的下潜与上浮功能。 此新型无人机设计方案旨在打破环境因素对无人机工作 条件的限制, 使得无人机同时具有在空中作业和在水中 作业的能力 。水空两用无人机总体结构如图 1 所示。
1 设计原理
参考潜艇的工作原理, 将无人机的舱体下部改装为 蓄水舱, 此舱体为密封舱, 仅与活塞式水泵相连, 通过 水泵将水吸入或排出舱体以控制无人机的整体质量, 实 现无人机的下潜与上浮功能 。在传统无人机的基础上增 添 4 台无刷电机, 搭配 4 个涡轮桨, 以实现无人机水下航 行能力 。无人机下潜时, 关闭飞行系统, 水泵开始工作, 当无人机潜入水中后, 4 个涡轮桨开始工作; 上浮时, 水泵开始排水, 同时 4 个涡轮桨通过转动调节无人机上 浮姿态, 到达水面后, 水下航行系统关闭, 空中飞行系 统开启 。水下航行的控制系统与空中飞行系统的操作方 式相同, 通过控制各个电机的转速来调节无人机的航行 姿态。
2 硬件设计
2.1 蛋壳形耐压外壳
由于所设计的无人机需要潜水, 其外壳应具备一定 的抗压性 。所设计的无人机主体采用蛋壳状结构, 又叫拱 形结构 。这种结构能够在水下承受更大的压力, 与日常 生活中单手捏不碎鸡蛋是一个原理。而且, 蛋壳大体上也 呈现出流线型, 可以减少在水下前进时受到的阻力。
蛋形壳体属于轴对称回转薄壳构造, 其母线方程可 用下列方程表达:
式中: a 为壳体长轴半径; b 为壳体短轴半径; θ 为蛋 形角。
蛋形壳体自身质量与其排水量的比值称为浮力系数δ[2], 表达式为:
式中: v0 为壳体材料体积, 可用壳体厚度与表面积相乘得 到; v1 为壳体容积; ρ0 和 ρ1 分别为材料密度和液体密度。
2.2 储水装置
鱼儿在水中自由浮沉得益于它灵活的鱼鳍和鱼鳔 。 鱼鳔中有空气, 胀大鱼鳔鱼就下沉, 缩小鱼鳔鱼就上浮 水面 。这种控制自己潜水水位的原理非常简单, 就是 “阿基米德定律”。
所设计的产品将采用蛋壳的下半部分储水, 如图 2 所示 。为实现水泵同时具备吸水与排水功能, 安装一个 电动 L 形三通球阀 。无人机将要下沉时, 打开水泵, 往 蓄水舱中注水, 使无人机的质量不断增加, 直到无人机 的质量大于其排水量, 这时无人机就会下潜; 无人机要 上浮时, 利用螺旋桨的动力使无人机快速上升, 到达水面 后水泵再次运行, 通过三通球阀迅速排水, 以保证无人 机能够顺利升空。
2.3 上浮螺旋桨
该产品安装了多个螺旋桨, 当助推螺旋桨启动时, 无人机会得到更多动力, 快速上升到水面, 在水泵的辅 助下, 排水会在很短的时间内完成 。另外, 有了上浮螺 旋桨的存在, 无人机在空中的快速升空也成为了现实。
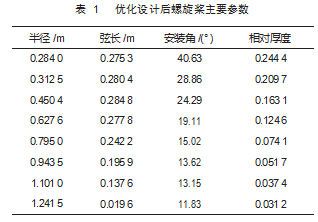
为提供足够的推力, 螺旋桨直径越大越好, 但直径 过大易使螺旋桨桨尖发生激波损失, 从而导致螺旋桨效 率急剧下降, 并使螺旋桨发出很大的噪声[2] 。对比各项 数据, 结合无人机载质量情况选择合适涡轮桨的桨叶大 小, 优化设计后螺旋桨的主要参数如表 1 所示。
2.4 飞行旋翼
所设计的产品为多旋翼无人机, 与市面上的无人机 一样, 也在四角安置了 4 组用于飞行的旋翼 。在旋翼拉 力 、无人机爬升速度 、旋翼转速给定的情况下, 最高力 效旋翼的能量损失是最小的 。当桨叶所有截面都处于最 大升阻比迎角时, 旋翼的力效是最高的。
考虑桨叶数, 根据涡流理论, 旋翼拉力 T为:
式中: ρ 为空气密度; v 为无人机爬升速度; R 为旋翼半 径; Rh 为桨毂半径; r 为桨叶某一截面的径向坐标; kP 为 纠正系数; K1 为过程变量[3]。
通过多次计算及设计, 结合与其他零件的配合性, 充分考虑各因素, 制造出最适合所设计潜水无人机的飞 行 旋 翼 。 该 飞 行 旋 翼 半 径 R=0.495 m, 桨 毂 半 径 Rh= 0.055 m, 采用RAF6 翼型, 将桨叶划分成6 段 ( 7 个截面), 无人机爬升速度为 2 m/s, 旋翼最大转速为 5 824 r/min, 许用拉力 T=74.793 6 N( 1 kgf≈0.98 N)。
2.5 动力系统装置
目前大多数多旋翼无人机都采用锂电池供电, 该产 品也不例外 。锂电池有以下优点: 高质量比能量, 较同 等容量的钢壳 、铝壳电池分别轻 40% 、20%; 使用寿命 相对较长, 可达到 6 年以上 。 以采用磷酸亚铁锂为正极 的锂电池为例, 在 1C 充放电倍率下, 循环周期的纪录可 达 1 000 次; 具备高功率承受力, 其中电动汽车用的磷酸 亚铁锂锂离子电池可以达到 15 ~ 30 C 充放电的能力, 便 于高强度的启动加速[4-5] 。一般情况下, 500 g 的锂电池 充能 1 h 可以为无人机提供 0.5 h 的飞行动力 。考虑充电 可靠性, 设计硬件二次保护电路, 当锂电池组电压大于 保护门限时, 断开充电输入, 避免锂电池组过充[6]。
对组合蓄电池组中的电池温度进行采样, 将温度值 转换为对应的电压值作为单片机采样判据, 一旦超温就 对外告警。
2.6 材料设计
机身主体材料的选择关系到飞机的整体性能, 在选 取无人机机架材料时, 需要综合考虑质量, 抗拉伸强度和 二次加工等因素。因此, 在选取机架材料时, 要满足质量 轻且刚性大的要求, 以提高无人机的续航时间和机架整 体的可操作性 。为能够飞起, 需要选取轻便的材料; 为 能够潜水, 需要良好的抗压性 、耐水性 、抗腐蚀性[7]。
无人机常采用发泡聚丙烯 、聚丙烯塑料 、铝合金和 碳纤维作为机身主体材料, 从断裂伸长率 、弹性模量、 抗拉强度和密度等性能对上述材料进行对比分析[8], 结 果如表 2 所示。
无人机在飞行过程中最重要的是负载能力 、续航时 间和抗外界干扰能力 。综合性能需求 、经济等各方面考 虑, 并对比机身主体常用材料, 选择碳纤维作为机身的 主体材料。
3 软件设计
3.1 遥控装置设计
遥控装置主要由遥控器 、接收器 、解码器 、伺服系 统组成 。其具体工作过程: 由遥控器发送指令, 然后接 收器接收指令, 再由解码器进行解码, 最后由伺服系统 执行指令。
该产品的遥控系统与传统无人机有区别, 由于多了 4 组涡轮桨, 需要额外加装 4 个通道来控制无人机的水下航行姿态, 包括俯仰 、升降等动作[9] 。另外, 还需加入 1 个通道来控制水泵的泵水工作, 总共 9 个通道。
综上所述, 遥控系统的选型需要具备 9 个以上的控 制通道, 考虑市场上满足上述条件的遥控器后, 选用深 圳某公司的 AT9S PRO 遥控器, 工作电压为 7.4 ~ 15 V, 传输频率为 2.4 GHz。
3.2 飞控系统设计
无人机的自主飞行离不开飞控系统的协助 。飞控系 统主要包括飞控软件 、主控芯片以及气压传感器 、温度 传感器 、高度传感器等一系列传感器[10- 11]。
目前民用的无人机飞行控制系统主要分为开源和商 业闭源两大类[ 12] 。所设计的潜水无人机选用开放性较好 的 Pixhawk 飞行控制系统作为无人机的主控。
Pixhawk 飞行控制系统采用双处理器的运行模式, 且 副处理器 STM32F103 安全稳定, 为整个系统提供了硬件 冗余 。 由于硬件中数百项参数完全开放, 具有良好的重 塑性和拓展性, 并且其外部设备全部实现自动检测和配 置, 使用者和开发者可根据实际需求开发 Pixhawk 飞行 控制系统的接口功能[13- 14] 。Pixhawk 飞行控制系统的接口 连接如图 3 所示。
每个电机用信号线连接到对应的 PDB 板信号针脚上, 确保电机序号与针脚编号一致。
3.3 数据管理系统
B/S 模式具有稳定性高 、维护便捷 、跨平台 、共享 程度较高以及方便推广的特点, 因此成为本系统的首 选架构 。此数据管理系统架构包括表现层 、功能层和 数据层。
数据层是无人机数据管理系统的基础, 负责管理无 人机获取的数据, 主要包括空间位置 、单张图像 、数字 正射影像图及属性 。其中, 空间位置和数字正射影像图 通过 GIS 服务器 Geoserver 发布, 属性数据通过数据库服 务器 PostGIS 建立与功能层的数据交互。
功能层是本系统中最重要的组成部分, 主要包括航 线规划 、图层管理 、地图浏览 、数据查询 、任务总览、 飞行轨迹和视频回放功能[15]。
表现层是整个系统的显示部分 。表现层接收用户的 指令, 然后传送至功能层, 指令结果由前端展示, 由此 来实现无人机的高度一体化。
4 测试与结果分析
对该无人机开展了模拟飞行和航行测试, 取得了良 好的效果 。机身质量为 4 kg, 轴距为 650 mm, 单程飞行 距离 34.95 km, 最大前飞速度达到了 11.7 m/s, 并且其悬 停时间也达到了 60 min, 超过了 74% 的多旋翼无人机, 足够长的悬停时间能够让无人机完成更多任务 。该无人 机的整体性能超过市面上 65% 的多旋翼无人机 。它在水 中的航行时间达到 40 min, 能够较好地进行水中勘测 、 拍摄等任务 。无人机测试各项数据如图 4 所示。
5 结束语
针对无人机潜水的新功能需求, 提出了一套新型无 人机设计方案, 使得无人机具有空中作业与潜水作业的 能力 。在具体结构上创造性地提出了无人机蛋壳状主体 结构, 该结构能够承受更大压力, 方便水中作业, 其流 线 型 外 形 能 够 降 低 更 多 阻 力 。 结 果 表 明: 采 用 基 于 STM32 单片机的 Pixhawk 飞行控制系统, 可以实现无人 机在飞行与潜水 2 种模式下的自由切换, 并且能够顺利控制无人机在 2 种模式下的运作状态 。该设计方案在一 定程度上解决了环境条件对无人机作业的限制, 使得无 人机能够更加广泛地应用于空中勘测 、水文检测 、侦查 等领域 。随着无人机行业的不断发展, 水空两用无人机 会逐渐展现出其应用价值。
参考文献:
[ 1] 王雯,王日俊, 张健 . 基于观测器的四旋翼飞行器自适应滑模 姿态控制[J]. 电光与控制,2019.26(6):75-79.
[2] 唐飞, 高涵宇,李林燎,等 . 蛋形水下耐压壳的屈曲行为研究[J]. 船舶工程,2019.41(2):90-94.
[3] 张胜利 ,席德科 . 飞艇螺旋桨气动优化设计[J]. 机电一体化 , 2009. 15(11):78-81.
[4] 李娅莉 . 柔性薄膜太阳能电池片可调温发热服的研发与评价 [D]. 北京:北京服装学院,2012.
[5] 张植勋,夏庆锋, 曹洋 . 多旋翼无人机的续航优化[J]. 兵工自动 化,2020.39(10):93-96.
[6] 陈友鹏,李雷,赖刘生,等 . 多旋翼无人机的特点及应用[J]. 时代 汽车, 2021(16):20-21.
[7] 马代健 . 无人机热红外图像采集系统开发与应用[D]. 咸阳:西 北农林科技大学,2018.
[8] 孙昕,周德旭,甘子东,等 . 无人机结构用复合材料及其制造技 术研究[J]. 产业创新研究,2021(16):90-92.
[9] 张立元 . 多旋翼无人机多光谱遥感图像采集系统开发[D]. 咸 阳:西北农林科技大学,2017.
[10] 牛渊 . 多传感器融合的小型无人机地形跟随系统设计[D]. 深 圳:深圳大学,2017.
[ 11] 居涛 . 危险场所事故灾害无人机侦检技术应用研究[D]. 广 州:华南理工大学,2017.
[ 12] 曹琴 . 基于 APM 飞控技术的校园无人巡航车的设计与实现 [D]. 西安:西京学院,2017.
[13] 姚光乐,王守雷 .Pixhawk 飞控系统的四旋翼无人机室内飞行 技术研究[J]. 电子世界,2021(7):86-88.
[ 14] 张祖航, 曹著明, 薛翼飞 . 无人机 APM-PIXHAWK 飞控应用研 究[J]. 职业,2017(28):112- 114.
[15] 齐现伟,辛全仓, 高晓黎,等 . 基于开源 WebGIS 的中小型城市 数字化管理信息系统的设计与实现[C]//Proceedings of 2010 National Vocational Education of Communications and Informa ‐ tion Technology Conference (2010 NVCIC). Scientific Research Publishing,2010:56-59.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/60745.html