SCI论文(www.lunwensci.com)
摘要:高速LED金线键合机焊头在XYZ三维空间内高加速度工况下频繁往复、启停,要求其核心部分X/Y运动平台上解耦机构质量小,静动态特性良好。以某金线键合机的关键构件解耦板与交叉滑台为研究对象,将简化后构件模型利用有限元软件进行拓扑优化,对优化前后的解耦板与交叉滑台进行静力学、动力学分析,并对质量、静位移和1、2阶固有频率进行计算及对比,研究优化前后各对象的构件性能。结果表明:优化后的解耦板与交叉滑台最大静位移分别减小40.69%和35.29%,质量分别减少0.200 51 kg和0.093 69 kg,轻量化效果显著,优化后解耦板1阶固有频率提高17.13%,交叉滑台的固有频率小幅下降。研究结果可为键合机运动平台结构进一步优化提供参考。
关键词:高速LED,金线键合机,X/Y工作平台,拓扑结构优化,有限元分析
Topological Structure Optimization of Decoupling Mechanism Key Components of High Speed Full Automatic LED Gold Wire Bonding Machine
Zhou Zhencai1,Ye Guoneng1,Wang Zhu2,Wang Tianlei2,Zhou Zhiheng3
(1.Guangdong KEJIE Technology Co.,Ltd.,Jiangmen,Guangdong 529000,China;
2.Faculty of Intelligent Manufacturing,Wuyi University,Jiangmen,Guangdong 529020,China;
3.School of Eectronics and Information Engineering,South China University of Technology,Guangzhou 510640,China)
Abstract:The welding head of the high speed LED wire bonding machine frequently reciprocates,starts and stops under high acceleration conditions in the XYZ three-dimensional space,requiring the decoupling mechanism on the X/Y motion platform as its core part to be lightweight and have good static and dynamic characteristics.Taking the decoupling plate and cross slide platform of the key components of a wire bonding machine as the research object,the simplified component model was optimized by using finite element software for topology optimization;the static and dynamic analysis of the decoupling plate and the cross slide platform before and after optimization was conducted,and the mass,static displacement,and first and second order natural frequencies were calculated and compared to study the performance of the component before and after optimization.The results show that the maximum static displacement of the decoupling plate and the cross slide platform after optimization and reconstruction are respectively reduced by 40.69%and 35.29%,and the mass is respectively reduced by 0.200 51 kg and 0.093 69 kg,the lightweight effect is significant;after optimization,the first order natural frequency of the decoupling plate has increased by 17.13%,and the natural frequency of the cross slide platform has decreased slightly.The results of this paper can provide a reference for further optimization of the motion platform structure of the bonding machine.
Key words:high speed LED;gold wire bonding machine;X/Y working platform;topology optimization;finite element analysis
0引言
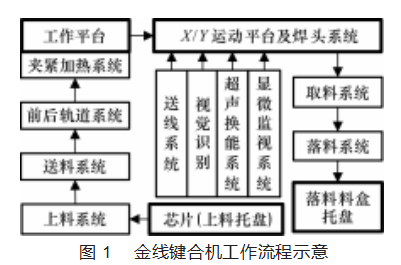
随着电子信息产业的高速发展,高性能电子封装装备成为众多半导体器件制造企业的重大需求[1]。金线键合机涉及到光、机、电和控制等方面,X/Y工作平台为其核心部件,其结构的优劣直接影响焊线的效率和质量,文献[2-5]讨论了其重要性。高速全自动LED金线键合机是一个配置16个电机的复杂系统,其工作流程如图1所示。
解耦机构是X/Y运动平台的关键部件,主要由解耦板与交叉滑台组成,工作时由音圈电机驱动,推动焊头系统频繁启停、高速高加速度运动,实现精准定位。文献[6-9]进行了基于音圈电机的运动平台动态性能、结构优化定位与控制方法的系统的动力学行为与控制方法研究,达到了降低质量、减小惯性冲击和提高重复定位精度的目的。文献[10]采用Solidworks Simulation对解耦板进行结构优化,取得了较好的效果。
目前国外高端键合机,如ASM、K&S品牌键合机焊线速度达20线/s、定位精度小于或等于1µm、键合精度2.0µm、MTBF大于或等于168 h,并能很好地保证超低弧、大跨度弧以及多层弧线等的外形及张力控制一致性。近年来,国产全自动引线键合机得到较好的发展,但装备产品的性能指标仍存在较大差距[11]。
综上,要提高金线键合机工作速度、质量和稳定性,应首先提高其关键部件X/Y运动平台及焊头系统的动态性能。本文针对金线键合机X/Y运动平台中解耦机构进行分析,采用有限元法对关键构件解耦板与交叉滑台进行结构优化和轻量化设计,使其满足高速往复、频繁启停运动产生的冲击需求;采用有限元软件对优化前后的解耦板和交叉滑台进行静/动态分析与对比。
1 X/Y运动平台的解耦机构
X/Y运动平台是金线键合机的核心部分,基本结构如图2所示。该结构采用直线音圈电机直接驱动X/Y运动平台,省去中间传动环节,可有效提高平台结构刚度、减小运动惯量。直线音圈电机具有无滞后、推力大、响应快和精度高等特点,适合直接驱动平台完成高加速和高精度的高频启停的定位运动[12]。
如图2~4所示,音圈电机1通过交叉滑台带动焊头系统实现X方向运动,音圈电机2通过解耦板带动焊头系统实现Y方向运动。劈刀Z向运动是通过音圈电机3带动传动机构来实现的(图中未显示)。
2解耦板与交叉滑台的拓扑优化
2.1拓扑优化方法
连续体结构拓扑优化主要有刚性设计优化与柔性设计优化2种。本文采用刚性设计优化,即在给定的设计区域内设计一个最优结构使之在满足约束条件的前提下变形最小。
连续体结构拓扑优化可分为均匀化方法、变密度方法和变厚度方法等。本文采用变密度结构拓扑优化方法[13-15]。优化数学模型是用数学的形式表示设计问题的特征和追求目标,是对实际问题的特征或本质的抽象。变密度法数学模型的建立是优化设计的关键。模型由目标函数、设计变量和约束条件组成,横梁结构拓扑优化方法的数学模型可表述为:
式中:X=(x1,x2,…,xn)为对横梁拓扑优化时的设计变量,本文的设计变量为单元的密度;f(X)为目标函数;g(X)为不等式约束;h(X)为等式约束,是需要对横梁进行约束的设计响应;L为下限;U为上限。
2.2 CAD建模
解耦板及交叉滑台三维模型的轮廓尺寸受到导轨、滑块、音圈电机和焊头系统行程等的约束,在确定标准件和焊头系统行程后,可确定解耦板和交叉滑台轮廓尺寸,三维模型及其简化模型见表1。
2.3有限元模型建立
(1)单元类型选择及材料属性。选择单元类型为实体,解耦板与交叉滑台材料均为6061,材料性能见表2。
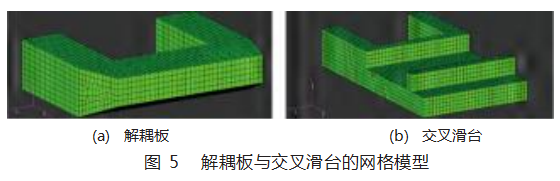
(2)网格划分。采用混合自动网格划分解耦板与交叉滑台模型,如图5所示。
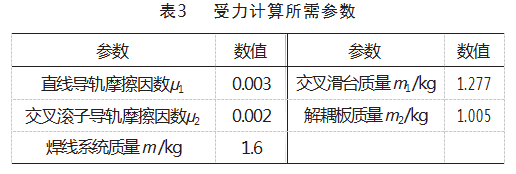
(3)添加约束边界条件。解耦板一端固定在X向音圈电机,另一端连接焊头系统;交叉滑台一端固定在Y向音圈电机上,另一端则用来承载焊头系统。焊线过程中2个音圈电机分别通过解耦板与交叉滑台带动焊头系统(包括超声换能器、打火杆、劈刀、线夹等)频繁快速启停,其最大加速度可达8g。为找到合理边界条件,需选取一个临界点。本文将音圈电机启动瞬间设为临界点,且电机已达到最大加速度8g,而解耦板、交叉滑台及焊线系统均为静止状态,表3列出了计算瞬间受力所需参数。
X向音圈电机启动瞬间受到的阻力为焊线系统和解耦板的惯性力F、焊线系统与Y向交叉棍子导轨的摩擦力F1和解耦板自重与Y向直线导轨的摩擦力F2,将表3中参数代入式(2),计算结果列入表4。
由表4可知,音圈电机启动时主要阻力为惯性力,将它作为主要载荷添加于解耦板与X向直线导轨接触面,解耦板与电机连接面添加全约束,如图6(a)所示。
同理,可计算Y向音圈电机受力情况,并列入表5。将惯性力圆整为230 N,并作为主要载荷添加于交叉滑台与X方向音圈电机的连接面,将交叉滑台远离音圈电机的面添加全约束,如图6(b)所示。
2.4拓扑优化
优化解耦板的目标是轻量化,但交叉滑台的基本尺寸及形状均受限制,因而交叉滑台的优化目标是柔度最小。但解耦板在减少材料后可能会导致模型刚度降低变形加剧,因此,在优化时需确定位移约束,使所选材料和模型刚度达到一定平衡,解耦板则是在刚度达到的情况下要求体积最小作为约束。拓扑优化设计过程如下:
(1)定义拓扑优化设计变量。设计变量是在优化设计中要不断变化的一组参数,代表一个设计方案。本文将单元密度作为解耦板与交叉滑台的设计变量。
(2)设置优化参数。①定义响应。本次优化需要定义2个响应,分别是体积分数和位移响应。②定义目标函数。本文目标是寻找解耦板的最佳材料分布方向及轻量化设计,交叉滑台在满足刚度要求的前提下轻量化,因此把解耦板的体积响应定义为目标函数,指定其为最小,交叉滑台的柔度定义为目标函数,指定其为最小。③定义约束。解耦板位移响应定义为约束,交叉滑台体积的0.5倍定义为约束,即最大优化结果可去除1/2材料。
(3)优化计算及结果分析。本文采用伪密度云图,优化计算完成后,可直接处理伪密度云图。原则是所取参数值对应的优化结构能清晰、准确地表现出材料的分布,不允许有明显的孔隙、断开等缺陷。解耦板和交叉滑台密度等值面分布状况分别如图7和图8所示,图中不同密度值显示不同颜色,红色密度值为1。
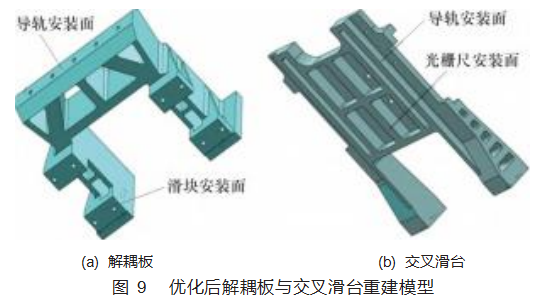
(4)模型重建。考虑实际的安装尺寸、加工工艺及应力集中等因素后,重建的解耦板与交叉滑台模型如图9所示。
3结果验证
3.1解耦板/交叉滑台有限元分析
为验证优化的合理性,需进行有限元分析,即将优化前后的解耦板和交叉滑台的模型(图10)直接导入有限元软件进行静力学及动力学分析,结果如图11~12和表6所示。由表6可得,在相同载荷、边界与约束条件下,优化后解耦板与交叉滑台最大位移均小于优化前。
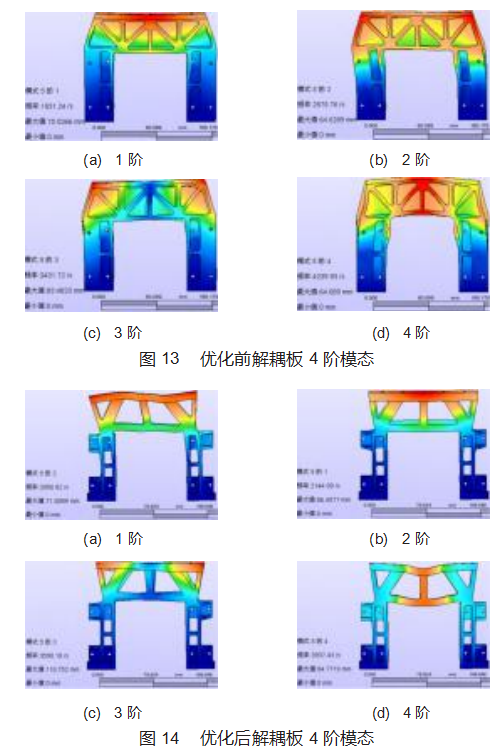
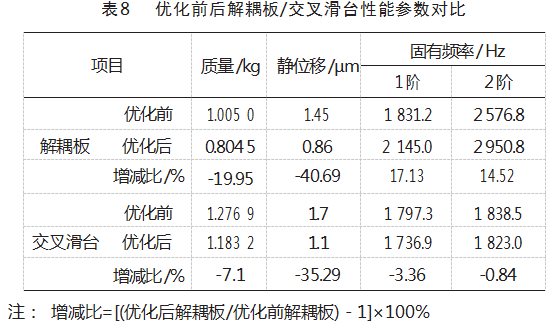
优化前后解耦板和交叉滑台前4阶振型如图13~16所示,各阶固有频率列入表7。
3.2激振源分析
作用在X/Y运动平台的主要激振源有超声换能系统、音圈带动X/Y运动平台系统频繁启停产生的冲击力。用于热超声键合的传统换能器多工作在60 kHz频率点附近[17],远超过解耦板和交叉滑台1~4阶的固有频率。此外,目前国外高端键合机如ASM、K&S品牌键合机焊线速度达20线/s[1],对应的启动、停止产生的冲击频率为80 Hz,远小于解耦板和交叉滑台的1阶固有频率。对比表7可知,解耦板和交叉滑台的前4阶固有频率远低于超声换能器工作频率,不处于激振源频率范围内。
3.3优化前后结果对比分析
解耦板与交叉滑台优化前后性能参数对比如表8所示。由表可知:(1)拓扑优化后的解耦板与交叉滑台的最大静位移分别为0.86、1.1µm,比优化前解耦板与交叉滑台的最大位移分别减小40.69%、35.29%,优化效果较好;(2)优化后解耦板与交叉滑台的质量分别减轻了0.200 51、0.093 69 kg,轻量化效果显著;(3)优化后解耦板的1、2阶固有频率分别提高了17.13%和14.52%,交叉滑台的1、2阶固有频率分别降低了3.36%和0.84%。以体积为目标,优化设计的解耦板固有频率有较大幅度提高,更远离激振源频率。而以柔度为目标优化设计的交叉滑台,其1、2阶固有频率均有小幅下降。分析结果验证了优化设计的合理性。
4结束语
本文分析了金线键合机X/Y运动平台的解耦机构,并对解耦板与交叉滑台进行结构优化和轻量化设计。主要工作与结论如下:
(1)将X/Y工作平台的解耦板与交叉滑台的简化后模型进行拓扑优化,然后根据优化结果,结合实际工艺、安装等要求进行了模型重建。
(2)对优化前后的解耦板与交叉滑台进行了静力学、动力学分析,并对质量、静位移和1、2阶固有频率进行对比,验证了拓扑优化的合理性。
(3)优化后的解耦板与交叉滑台的最大静位移分别减小40.69%和35.29%,质量分别减小0.200 51、0.093 69 kg,轻量化效果显著;优化后解耦板的1、2阶固有频率分别提高了17.13%和14.52%,交叉滑台的固有频率有小幅下降。
(4)激励源分析表明:①激励源1,热超声键合的传统换能器工作频率约为60 kHz,远大于解耦板和交叉滑台的1~4阶固有频率;②激励源2,键合机X/Y运动平台频繁启停所产生冲击的频率为80 Hz,小于解耦板和交叉滑台的基频,不会引起这2个关键件共振。本文分析结果可为键合机运动平台的进一步改进提供参考。
参考文献:
[1]陈新,姜永军,谭宇韬,等.面向电子封装装备制造的若干关键技术研究及应用[J].机械工程学报,2017,53(5):181-189.
[2]王成君,胡北辰,杨晓东,等.3D集成晶圆键合装备现状及研究进展[J].电子工艺技术2022,43(2):63-67.
[3]黄玉财,程秀兰,蔡俊荣.集成电路封装中的引线键合技术[J].电子与封装2006,6(7):16-20.
[4]丁汉,朱利民,林忠钦.面向芯片封装的高加速度运动[J].自然科学进展,2003,13(6):568-574.
[5]中国半导体行业协会中国电子信息产业发展研究院.中国半导体产业发展状况报告[R].西安,2013.
[6]马志鹏.基于音圈电机的高速精密定位系统的动力学行为与控制方法[D].天津:天津大学,2012.
[7]陈全磊,高健,邱国良.平面LED焊线机xy平台的结构优化与性能测试[J].机床与液压,2015,43(7):28-31.
[8]李娟,刘延杰,孙立宁,等.新型2-DOF高加速定位平台的动态性能[J].光学精密工程,2008,16(5):851-855.
[9]王贵林,张湘,段纬然,等.音圈电机驱动的快速定位系统运动建模与参数辨识[J].机械科学与技术,2008,27,(1):37-40.
[10]叶国能,梁荣辉.基于Solidworks Simulation焊线机平台频率分析优化设计[J].机电工程技术,2021,50(4):169-172.
[11]中国电子学会电子制造与封装技术分会与电子封装技术丛书编辑委员会.电子封装工艺设备[M].北京:化学工业出版社,2012.
[12]WANG F J,ZHAO X Y,ZHANG D W,et al.Design and control of a high-acceleration precision positioning system using a nov‐el flexible decoupling mechanism[C]//Proceedings of the Institu‐tion of Mechanical Engineers,Part C(Journal of Mechanical En‐gineering Science),2010,224(C2):431-442.
[13]牛小铁,董立立.机械结构拓扑优化设计研究现状及其发展趋势[J].煤矿机械,2012,33(9):5-7.
[14]周振财,李同,王天雷,等.基于HyperWorks的机床横梁的拓扑结构优化设计[J].机电工程技术,2018,47(5):9-12,114.
[15]刘志强,王明强.应用拓扑优化理论进行结构概念设计[J],机械与电子,2005(10):27-29.
[16]王福军,赵兴玉,张大卫,等.热超声键合压电换能器的动力学特性[J].焊接学报,2008,29(10):69-72.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/60537.html