SCI论文(www.lunwensci.com)
摘要 :作战试验是当前部队工作的研究重点, 其在数据采集 、数据处理及数据识别过程中会产生大量的音视频文件及图片 。对这 些图像数据的分析结果表明, 存在某些图片不清晰 、视频数据采集不方便 、数据识别结果不准确等问题 。 因此, 为进行作战试验 领域的深入研究, 对这一过程中所用到的数据采集技术和数据处理识别技术进行探究和改进, 从拍摄设备选型和数据采集指导两 个方面对数据采集进行分析, 提出了图像转化 、 图像二值化 、 图像平滑去噪 、 图像分割和图像边缘检测等主要图像预处理操作, 并采用 YOLO 算法和 SSD 算法分别建立图像识别模型, 通过对采集图像的试验获得了相关实验结果, 所提方法有助于指导作战试 验工作的开展, 提升试验鉴定数据处理及分析能力, 增强数据管理控制效能, 以至极大拓展数据的利用率, 提高作战工作的效率 和准确度。
关键词: 图像预处理,数据采集,作战试验,图像识别
Research on Image Data Acquisition and Preprocessing Technology Lu Yahui1. Zhang Weihua1. He Feifei1. Wang Shuai2. Hao Jinhu2. Du Yuhong2
( 1. 63966 Unit, Beijing 100071. China; 2. School of Mechanical Engineering, Tiangong University, Tianjin 300380. China) Abstract: Combat test is the current research focus of the army, and a large number of audio and video files and pictures are generate in the process of data collection, data processing and data identification. The analysis results of these image data show that there are some problems such as unclear pictures, inconvenient video data collection, and inaccurate data recognition results. Therefore, in order to conduct in-depth research in the field of combat testing, the data acquisition technology and data processing and identification technology used in the process were studied. The data acquisition was analyzed from the selection of shooting equipment and the guidance of data acquisition , the main image preprocessing operations such as image transformation, image binarization, image smoothing and denoising, image segmentation and image edge detection were proposed, and YOLO algorithm and SSD algorithm were used to establish image recognition models respectively . The relevant experimental results were obtained. The proposed method will help guide the development of the combat test work, improve the data processing and analysis capabilities of the test identification, enhance the efficiency of data management and control, and greatly expand the utilization rate of data, and improve the efficiency and accuracy of combat work.
Key words: image preprocessing; data acquisition; operational test; image recognition
引言
随着计算机技术在图像领域应用不断深入, 人工智能和大数据分析等技术被广泛地运用在部队的各项工作 中, 开展作战试验初期, 大多采用填写表格的方式获取 一些难以采集的数据, 给参试指战员带来很多的额外工 作, 并且产生了大量谬误数据, 即使把表格电子化后效 果依然不好 。如何在作战试验开展过程中, 以无感知方 式获取相关数据成为大家研究的重点 。通过实践, 音视 频方式成为作战试验数据采集获取的重要技术方式 。在 近期的作战试验中, 各项目组均采取了以摄像器材为主 的视频采集手段, 在不干扰作战人员工作的前提下, 获 取第一手的作战试验视频数据, 因此如何对采集到的视 频数据进行处理是推进作战试验工作开展的首要任务。
国内外对作战试验的数据采集及图像处理识别做了 大量研究 。文献[1]中发现作战试验视频数据采集指标体 系尚未建立, 使得视频数据采集存在一定的盲目性, 造 成时间和器材的浪费, 同时产生大量无用视频干扰后期 视频数据处理工作; 文献[2]中发现视频数据预处理工作 手段不足, 造成人工处理时间极长, 视频数据质量无法 保证, 导致海量视频数据事后处理困难, 无法为评估工 作提供有力支撑; 文献[3]中发现智能化视频数据深入学 习能力不足, 对数据特征参数的处理能力达不到要求 。 同时由于应用场景复杂多变 、图像视频采集和分析挖掘 技术的原因, 严重制约了图像视频数据的利用。
本文首先从拍摄设备选型 、数据采集时的注意事项 及建议两个方面对图像采集进行分析, 然后对采集后图片进行预处理后通过 YOLO 等算法对其进行识别后归纳 出识别准确性与有效性, 旨在解决上述相关问题。
1 图像采集建议
图象数据采集时, 经常会受场地等自然环境的影响, 由此造成图象在收集与传送过程中会受照射灯光不平衡、 光响应不一致和拍摄角度等各种因素的影响, 使视觉图 象含有噪声影响而造成图象品质变坏, 从而影响图象的 的识别准确度 。所以可以针对上述图片的采集流程, 从 清晰度 、抖动 、反射 、失焦和拍摄角度 5 个角度, 对图 片采集人员的操作过程给出相应的采集建议[4]。
( 1 ) 清晰度
在选择拍摄设备时, 尽量选用高清的摄像机或者录 像机, 拍摄比例尽量选择 16 ∶9 或者 4 ∶ 3. 所输出的图 像像素在 1 440×900 以上, 这样可以保证即使输出图像 存在一定的失真, 也不会对后续的图像处理及相关信息 识别产生太大影响。
( 2 ) 抖动
拍摄时如果出现些许抖动, 就可能会改变待识别文 字或特征点在视频中的位置, 从而偏离识别区, 并且可 能造成短暂的失焦模糊 。如果有可能的话建议在拍摄过 程中通过简单的辅助设备提高相机的稳定性, 如八爪鱼 等设备, 如图 1 所示, 在提高采集效率的同时也避免了 采集人员长时间劳累。
( 3 ) 反光
采集内部设备时, 当座舱盖打开时, 上方的光线会 照进座舱内, 使屏幕产生反光 。建议关闭舱门或者利用 纸板等简易工具进行杂光遮挡, 尽量减少屏幕反光 。调 节好摄像机的明暗反差和光照性质, 可以合理运用硬光、 柔光, 硬光有强的光, 在高光端很明亮, 暗部层次很少, 边条比较清晰明朗, 颜色也有很大的浓度 。而柔光则能 够让主体背后的阴影更加柔和, 当物体上的照度相对较 低时, 其颜色的强度就会比较微弱 。所以合理运用灯光, 也可以获得良好的效果。
( 4 ) 失焦
在已掌握的某些视频资料中发现, 有些视频会在某 时刻突然失焦, 相机具备自动对焦功能, 会自动重新使画面清晰, 但失焦期间采集的图像会识别失败, 有可能 影响某些指标的统计 。建议在进行拍摄过程时要做好调 焦工作。
( 5 ) 拍摄角度
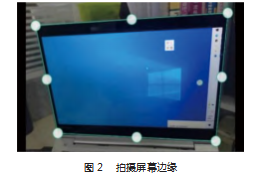
建议尽量可以包含某些设备的屏幕边缘, 这样不仅 可以确保画面不缺失, 有多余的部分还可通过剪辑去除掉[5] 。软件可以根据边框建立相关坐标系, 如图 2 所示, 对图像进行预处理, 矫正相关画面, 从而提高图像识别 稳定性。
2 图像采集硬件
当前部队上用于图像采集的摄像器材以摄像机为主, 辅助以照相机, 相机是指获取图像的前端采集设备, 也 是图像采集的关键硬件之一, 采集图像的质量优劣会对 图像处理的速度有很大影响。
相机根据应用途径可分为民用相机和工业相机两种, 工业相机的主要参数包括传感器类型 、最大帧率 、触发 方式 、分辨率 、像素深度和数据接口等, 图像质量好、 噪声较小 、感光较好[6] 。 民用相机的图像传感器采用隔 行扫描, 携带方便, 操作简单 。相机根据扫描方式可分 为面阵相机和线阵相机 。前者以平面为单位获取图像, 可以一次采集完整的图像信息, 易于调节 、成本低; 而 后者每次曝光一行图像, 然后拼接形成整个图像, 调节 相对复杂, 成本较高 。另一方面, 分析对比黑白相机与 彩色相机, 在同样的条件下, 黑白相机具有更高的精度, 图像边缘的采集效果更好, 可以直接处理黑白相机获取 的灰度信息 。分辨率是相机的最基本参数, 是指相机每 次获取图像的像素数, 根据目标所需精度与视野范围可 求出相机单方向分辨率 。分辨率和像素深度共同决定了 图像的大小, 其中像素深度越高, 采集到的图像质量就 越高, 但是也降低了采集的速度, 增加图像处理的数据 量, 同时成本也会提高。
( 1 ) 民用相机
索尼 Alpha 7R IV 相机, 如图 3 所示 。采用新的背照 式影像传感器, 背照式结构与出色降噪技术相结合, 可 提供高感光低噪点的优异影像画质[7], 镜头更加牢固的 同时提升了舒适性和稳定性。佳能 EOS R6 相机, 如图 4 所示 。 自动对焦的范围最 大可以达到 100% ×100% 全屏对焦, 约 0.05 s 的自动对焦 速度 。EOS R6 还搭载了机身防抖, 实现了机身防抖和镜 头防抖的协同工作。
( 2 ) 工业相机
海康 MV-CE200- 10GM/GC 工业相机, 如图 5 所示 。 这款是 2000 万像素的工业面阵相机, 具有噪点低 、分辨 率高 、图像优异及性价比高等特点, 可无缝链接第三方 软件。
大恒图像 LA-CC-04K05B 工业相机, 如图 6 所示 。 采用基于先进的双线彩色 CMOS 技术, 有出色的灵敏度 和速度, 可以满足各种领域不同的需求。
3 图像预处理技术
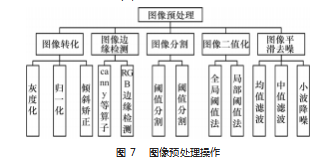
图像预处理是为了提高图像识别的准确度而对图片 上模糊信息进行处理的一个步骤 。本文根据部队对拍摄 图像的处理需求, 对常见的图像预处理操作按照功能和 需求分为了 5 种, 如图 7 所示。
( 1 ) 图像转化
由于拍摄角度等技术的问题, 可能会使得上传的 图片倾斜, 导致扫描的图像位置不正, 因此需对其进 行放缩 、旋转 、平移等校正工作, 为便于后续预处理 操作, 还需将其进行归一化, 常见的有 Hough 变换等 方法 。
( 2 ) 图像二值化
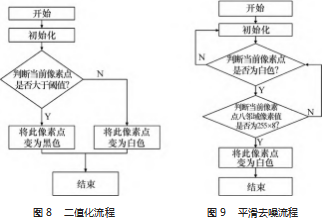
二值化又被称作灰度分割, 将图像的灰度分为 0和 1 两种值 。设定一个函数 g ( m, n ), 表示某一个像素 点 ( m, n ) 的灰度值, 则有 g ( m, n ) ∈ {0. 1. … , 255}, gx ( m, n ) ∈ {0. 1}, 二值化过程如下:
图像二值化的流程如图 8 所示。
( 3 ) 图像平滑去噪
图像平滑的目的之一是消除噪声, 二是模糊图像, 降 噪和平滑滤波操作可以将二值化处理后所存在的噪音和线 条边缘毛刺进行消除 。图像平滑去噪的流程如图 9 所示。
( 4 ) 图像分割
图像分割指将图像的某些感兴趣的特征区域分割提 取的技术, 分割的目的是把图像分成一块一块的区域, 是基于像素特性的分布, 通过阈值处理完成的[9]。
传统的图像分割技术分为全局分割和区域分割 。其 中全局分割又称为阈值分割, 分为全局阈值法 、迭代式 阈值分割和直方图阙值分割等; 区域分割技术主要包括 区域生长法和分水岭分割法[8] 。如今, 基于深度学习的 图像分割技术正在逐渐广泛使用中, 基于 YOLO 算法的 图像分割技术, 不仅提升了图像分割速度, 而且精度也 能够满足要求, 因此得到了广泛的使用。
为了将目标从背景当中分离出来, 减少背景对目标 的干扰, 提升检测速度, 实现更好的目标识别效果, 首 先将卷积核在图像上滑动, 把图像每个像素点的灰度值 与卷上的数值相乘, 再将所有的数值相加得到最终的图 像像素灰度值 。然后确定池化区域的大小, 将得到的卷 积特征分割成多个区域, 然后用这些区域的池化特征来 确定池化之后的卷积特征。
最后对每个 cell 分别进行预测, 其中, 每个 cell 对应 两个 boundingbox, 两个 boundingbox 负责坐标的预测 。根 据预测到的坐标便可将目标从背景中分离出来。
( 5 ) 图像边缘检测
在目标检测过程中, 要对目标边缘进行检测, 确定 目标在图像中的位置, 为下一步目标的识别做好准备, 传统的图像边缘检测需要对图像的每个像素点均进行检 测, 增加了边缘检测的时间 。而如果将图像进行分块处 理, 对每块区域分别进行检测, 可大大减少边缘检测的 时间[9- 10]。
图 10 所示为 480×640 像素的图像, 将其分为 32×32 的若干个子块, 然后对每个子块分别进行检测。
公式为:
f(x, y )|f(x+dima|f(x, y )+dima) |f(x+dima, y+dima) =1 ( 2 )
首先对子块的左侧 、右侧 、左下和右下 4个顶点灰 度值代入式 ( 2 ) 进行判断, 如果判断结果为真, 说明 4 个顶点至少存在一个像素点包含目标区域 。然后对每个 子块分别进行上述操作, 并将包含目标区域的子块进行 标记, 并得到每个子块坐标 。随后根据包含目标区域子 块坐标, 便能得到包含目标区域的最小矩形范围 。最后 将最小矩形范围内的每个边缘块进行边缘检测, 就能得 到目标的边缘。
4 图像识别算法
4.1 YOLO 算法
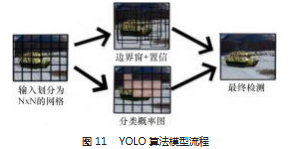
YOLO 算法识别模型在训练时需要将图片进行划框 分块后得到每个模块的内容及中心坐标, 并求出长和宽。
依此将输入的预处理后的坦克图像缩放为标准尺寸 的正方形图片, 分割成 M×M 的网格后在网格中随机生成 边界框, 其置信度函数公式为:
S = P (Ci |O)*RIOU = P (Ci )*RIOU ( 3 )
式中: P (Ci |O) 为网格中的目标所属目标类别 i 的概率; P ( O ) 是判断网格中有无目标出现; RIOU 为边界框和标 记框的预测交叉比值。
模型的损失函数为:
( 4 ) 该算法将目标分类和目标定位两个问题合成一种方法, 利用分类框和检测框来实现模型的识别, 提高算法 效率的同时也能识别图像的所有内容。
4.2 SSD 算法
这是一种通过回归网络来实现端到端的识别算法模 型[11- 12], 结构模型如图 12 所示。
首先根据图像特征生成不同大小, 不同尺度的特征图, 对特征图上的点进行抓取, 抓取的参数设置为最小 尺度值 0.2. 最大尺度值 0.9. 特征抓取盒为 5 种, 设有 n 个特征图:
根据坐标点来抓取特征, 模型的损失函数为:
F ( w, s, z, y ) =( Lconf ( w,s) + αL ( w,z,y ) ( 6 )
训练完毕后通过不同尺度特征对提取的深层图像特 征进行识别和预测, 并去除冗余检测框得到结果, 这一 模型加入了区域建议的步骤, 保证识别准确性的同时提 高了预测准确性。
5 实验结果
5.1 预处理结果
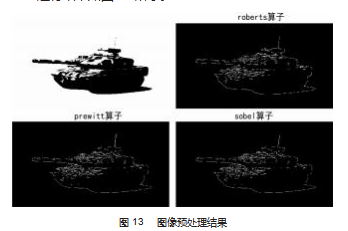
本文采用佳能 EOS R6 相机获取了一张彩色的坦克 车图片, 首先对其进行二值化处理, 将彩色图片变成灰 白图片后, 然后利用 3 种算子 (Roberts 算子 、Prewitt 算 子和 Sobel 算子) 分别对其进行边缘检测和形状提取后,
将结果进行对比进行输出, 这一过程的部分代码如下:
I=imread (´tank_ 1.jpeg´) ;
imshow ( I ) ;
thresh = graythresh ( I ) ;
B = im2bw ( I, thresh) ;
subplot ( 2. 2. 1 ), imshow ( B ) ;
BW1=edge ( B, ´roberts´) ;
BW2=edge ( B, ´prewitt´) ;
BW3=edge ( B, ´sobel´) ;
运行结果如图 13 所示。
5.2 识别结果
本文利用佳能 EOS R6 相机获取了一张坦克图片, 对坦克图片进行遮挡后进行识别实验, 实验结果如图 14 所示 。可以看到当坦克上半部分被遮挡时, 识别准确率 大约在 68%, 下半部分被遮挡时, 识别准确率大约在 87%, 证明坦克的上半部分包含信息要比下半部分多, 经过不断训练后识别准确率也提升了大约 15%。
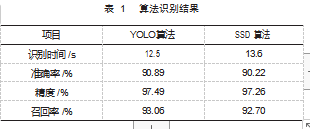
对于本文所提的 YOLO 算法和 SSD 算法, 利用数据 集中随机的 100 张图片进行实验后可得到如表 1 所示的实 验结果 。从表中可以看出两种算法的识别准确率均达到了 90% 以上, 证明了深度学习在图像分类和识别上的优 越性 。两种算法的识别效果非常接近, 但 YOLO 算法在 每一项上均略高于 SSD 算法, 因此建议采用 YOLO 算法 进行后续的改进与操作。
6 结束语
本文针对于当前部队上所面临的视频采集问题, 通 过分析视频采集硬件并选型, 提出采集指导建议来为后 续的数据采集准确性提供保证 。针对于采集的图像数据 处理盲目性, 提出从图像二值化 、边缘检测 、图像分割 等 5 个方面来对其进行预处理, 为图像识别打下坚实的 基础, 最后通过 YOLO 算法模型和 SSD 算法模型对其进 行验证, 达到图像识别的目的 。当前从数据从采集到处 理均是由人工完成的, 因此可以将本文的内容和人工工 作结合, 将这一过程智能化, 通过设计和开发系统软件的 方式来实现电脑的智能采集处理和识别, 提高工作效率。
参考文献:
[1] 刘豪 . 基于 FPGA 的高清视频采集与预处理系统设计[D]. 西 安:西安电子科技大学,2021.
[2] 唐信军 . 基于复杂背景的红外图像预处理技术和目标跟踪技 术研究[D]. 南京:南京理工大学,2015.
[3] 朱家 . 复杂环境下军事目标检测与威胁度评估[D]. 太原:中北 大学,2020.
[4] 吴海波 , 王晨 , 崔禹 . 深度图像预处理算法研究[J]. 电子科技 , 2021.34(11):31-36.
[5] 陈胜利, 叶贞, 罗顺权,等 . 机器视觉图像采集实验平台的开发 与应用[J]. 机械工程与自动化,2022(1):158- 160.
[6] 周利斌,刘茹, 陈虎,等 . 图像采集及处理的模块算法设计[J]. 电 子技术与软件工程,2019(12):69.
[7] 杨朋飞 . 阵列相机图像采集控制与处理技术研究[D]. 西安:西 安工业大学,2020.
[8] 王帅,方宇, 蒋晓东,等 . 城市轨道车辆综合线路图处理系统设 计与开发[J]. 智能计算机与应用,2020. 10(5):172- 175.
[9] 唐俊,龚羡萍, 刘荃 . 基于 MATLAB 的红外图像预处理算法对 比研究[J]. 单片机与嵌入式系统应用,2021.21(10):63-67.
[10] 石海涛 . 多路图像同步采集与预处理技术研究[D]. 西安:西安 科技大学,2019.
[11]杨珺鹏 .LED 封装过程智能化中的图像采集及预处理系统研 究[D]. 广州:华南理工大学,2018.
[12] 刘英 . 基于卷积神经网络的陆战场目标分类算法研究[D]. 成 都:电子科技大学,2020.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58851.html