SCI论文(www.lunwensci.com)
摘要:为实现对梁场箱梁模板的清理、脱模剂喷涂自动化操作, 减少人工投入, 降低工人劳动强度, 通过引入自动控制理念, 研 制了预制箱梁模板清理喷涂装置。该装置是将模板清理、混凝土渣收集、脱模剂喷涂集于一体的专用设备, 具有自动行走控制、 自动清理收集控制、自动喷涂控制等功能特点, 控制系统以西门子 S7- 1200 系列PLC 为核心, 并基于 MCGS 组态软件技术实现了人 机交互, 详细阐述了系统软硬件控制方案。整机采用无线遥控器进行操作, 同时通过 4G 网络将数据传至云端服务器, 实现了该装 置远程信息化监控, 便于用户实时管理与维护。经现场实验结果显示: 该设备作业时间约为 1.5 h, 较人工作业时间, 效率提高约63%, 该设计实现了模板清理喷涂的自动化, 提高了模板清理喷涂的效率。
关键词:模板,自动,清理,喷涂,信息化
Design of Control System for Cleaning and Spraying Device of Prefabricated Box Girder Formwork
Ai Xiaojun1. Tan Kaiwei2. Du Xiaogang2
( 1. The 6th Engineering Co., Ltd., of China Railway 11 Bureau Group, Xiangyang, Hubei 441100. China;
2. Hanjiang Heavy Industry Co., Ltd., of China Railway 11th Bureau Group , Xiangyang, Hubei 441000. China)
Abstract: In order to realize automatic operation of cleaning and spraying of release agent for box girder formwork in girder yard, reduce labor input and labor intensity, a prefabricated box girder cleaning and spraying device was developed by introducing automatic control concept . The device was the formwork which integrate cleaning, released agent spraying, and concreted slag collection in a body′s specialized equipment, the device had automatic walking control, automatic cleaning collection control, automatic spray control characteristic. The control system took Siemens S7- 1200 series PLC as the core, and realized human-computer interaction based on MCGS configuration software technology, and elaborated the system software and hardware control scheme in detail. The whole machine adopted wireless remote control for operation, and the data was transmitted to the cloud server through 4G network, realizing the remote information monitoring of the device, which was convenient for real-time management and maintenance by users. The field experiment results show that the equipment operation time is about 1.5 h, compared with the manual operation time, the efficiency in creases about 63%, the design realizes the formwork cleaning and spraying automation, improves the formwork cleaning and spraying efficiency.
Key words: formwork ; automatically; clean up; coating; informatization
0 引言
目前高速铁路预制箱梁模板清理和喷涂主要是靠人 工操作, 重复工作多, 劳动量大, 且对工人身体健康影 响较大。在涂刷脱模剂时, 工人随意性较强, 存在脱模 剂涂刷不均匀, 影响箱梁的外观质量[1-3], 继续研究模板 自动化清理和喷涂脱模剂装备, 实现模板自动清理、打 磨和喷涂脱模剂等功能。
随着智能化、信息化的高速发展, 箱梁预制场也需 逐渐向自动化、智能化施工发展, 减少人工投入, 提高 箱梁模板自动清理、打磨及脱模剂喷涂等施工效率。本 文基于目前箱梁预制施工现状, 研制开发了一套用于模 板清理、打磨、喷涂专用装置, 应用效果达到预期效果。
1 装备结构及性能
模板清理喷涂装置主要由机架、走行机构、清理机 构、收集机构、喷涂机构、电控系统等 (图 1) 组成。
1.1 机架
机架采用桁架式结构, 主材采用矩形钢管, 具有结构轻, 迎风面积小的特点。机架主框架分为 3 个部分, 通过法兰联接在一起, 转运方便, 为适应轨道轨距变化, 走 行 车 架 可 在 主 车 架 上 移 动, 轨 距 可 调 范 围 为 13.2~ 13.6 m, 以适应梁场施工需要。
1.2 清理机构
清理机构分为平直滚刷机构和立刷机构。底面清理 采用平直滚刷结构, 具有清理面积大, 清理均匀的特点, 为适应模板预拱度浮动, 滚刷机构和机架连接处设有弹 簧, 可以自适应调节距离, 且保证对模板有一定预压力。 侧面清理采用立刷结构, 立刷尾部设有弹簧及纵向移动 结构, 可以适用于预拱度带来的模板距离变化; 为处理 模板底模和侧模结合处圆角, 专门设置带有球状刷毛立 刷, 保证对模板进行全方位清理。
1.3 收集机构
收集机构是由较软刷毛的立刷、 V 型同步带刷和吸 尘装置组成。清理翼模和侧模采用立刷, 每个立刷结合 部均有一个吸尘收集口, 灰尘直接被吸入或掉到底模上。 底面模板清理由两套 V 型同步带刷, 吸尘装置共同完成, 吸尘装置采用 3 个 2.6 m2 高精度过滤滤芯和一整套脉冲反 吹控制系统。
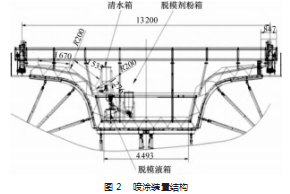
1.4 喷涂装置
喷涂装置由喷涂机构和计量机构组成。如图 2 所示。 喷淋机构由电机、柱塞水泵、控制阀、喷淋系统等组成; 计量机构主要由脱模液箱、封闭式脱模剂粉箱和清水箱 组成。另外, 喷淋系统主管路和每个喷头处均设置有滤 网, 以防颗粒物进入喷淋系统而堵塞喷头。
1.5 走行机构
走行机构采用轮轨型式, 由轨道、驱动电机和行走 轮组成, 为设备整体移动提供动力。为实现设备走行速 度线性可调, 采用变频器变频调速[4]。
1.6 电控系统
电控系统包括电缆卷筒、电控柜等。电缆卷筒固定 在走行电机外侧走道上, 用于整机行走过程中供电电缆 收放; 电控柜是整个设备的控制核心, 电机及传感器接 线均接入控制系统内, 放在整个车架顶部中间。
2 工作流程及特点
2.1 工作流程
( 1) 启动准备。将设备吊装至模板, 设置行程限位 开关, 将脱模粉箱和清水箱所需物料加满, 按照触摸屏 上设定参数对物料进行配比及搅拌工作, 检查立刷和滚 刷与模板的贴合度。
( 2) 清理收集。按照自动清理模式启动走行机构、 清理机构、收集机构, 进行自动行走清理收集, 同时力 矩传感器实时监控并 (混凝土较多的地方力矩较大) 自 动调节行走速率, 达到快速清理效果。若需再次清理, 可再次自动清理或手动控制清理。
( 3) 模板喷涂。模板清理完毕后, 选择自动喷涂模 式, 依次启动走行机构、喷涂机构, 进行自动行走喷涂。 若喷涂效果不达标, 可再次自动喷涂或手动控制喷涂, 达到预定效果。
( 4) 结束。喷涂完成后, 拆除模板限位开关, 将装 置吊装至下一模板, 开始下一个工作循环。
2.2 设备特点
( 1) 采用 PLC 和触摸屏做为核心控制元件, 可靠性 高, 人机交互性良好。
( 2) 信息化程度高。配置远程信息化模块, 运行数 据可远程至云端数据库, 用户可实时远程监控设备运行 状态。
( 3) 作业效率高。整机模块清理喷涂时间仅需 0.5 h, 大大缩短模板清理、喷涂时间, 有效提高模板施工作业 效率。
3 控制系统
箱梁清理喷涂装置控制系统主要包括硬件与软件两 部分, 如图 3 所示。
硬件包括检测单元、控制单元、执行单元。检测单 元包括传感器、限位开关等, 控制单元为西门子 S7- 1200 控制器[5], 执行单元包括电机、电磁阀等。控制单 元根据检测单元的检测数据和既定程序进行分析处理, 发出指令给执行单元执行对应动作。
软件包括 PLC 程序和人机界面程序。 PLC 程序将各 类传感器数据及设备状态处理后传递给人机界面显示, 操作人员可通过人机界面设定系统参数传递给 PLC 进行 程序处理, 方便操作与监控维护。
3.1 系统硬件设计
3.1.1 检测单元
检测单元包括力矩检测、液位检测、脱模剂用量检 测等。(1) 力矩检测。通过力矩传感器[6] 检测装置走行 阻力, 为调整走行速率提供数据。(2) 液位检测罐体液 位检测均采用翻板液位计, 安装于罐体侧壁。(3) 行走 检测采用行程开关和红外开关双重检测, 可靠性更高; 脱模机用量检测采用罗斯蒙特流量计, 精度高, 可通过 485 通讯将数据远传至控制系统。
3.1.2 控制单元
控制单元通过既定程序进行逻辑处理检测数据, 并 对执行单元发出控制指令。(1) 可编程控制器。考虑控 制及接收信号种类总多, 箱梁清理喷涂装置控制系统采 用 PLC 控制器, 同时可与人机界面进行以太网通讯[7]。 控制单元选用西门子 S7- 1200 系统 1215C 控制器和 2 块数 字量输入输出模块和 1 块模拟量输入模块[8]。( 2) 触摸 屏[9- 10]。系统选用昆仑通泰 TPC1061TI 触摸屏, 支持以太 网、 485[11- 12]等通讯功能, 同时还预装了 MCGS 嵌入式组 态软件, 具备强大的图像显示和数据处理功能。
3.1.3 执行单元
执行单元是完成控制单元下达的指令, 实现装置完 成箱梁模板清理喷涂时所必须的各项动作。
3.2 系统软件设计
( 1 ) PLC 程序设计: PLC 程序设计包括了自动程序 和手动程序设计。自动程序设计是整个程序重点, 采用 顺序控制流程设计方法, 根据外部传感器数据, 实现对 模板依次自动清理及喷涂作业; 手动程序是对自动程序 有效补充, 在自动程序无法达到预期效果下, 可以手动 作业。具体流程如图 4 所示。
( 2) 人机界面程序设计: 人机界面程序设计主要用 于显示清理、喷涂过程中相关参数 (报警数据、运行状 态、扭矩数值、配料参数等)。人机界面还有数据记录功 能, 可将记录的数据进行归档[13]。人机界面如图 5 所示。
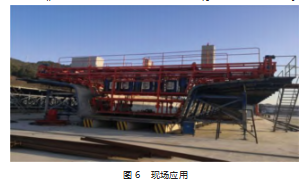
4 应用
为进一步验证预制箱梁模板清理喷涂装置及控制系 统的性能,将该装置应用湖杭铁路制梁场。现场应用如图 6 所示。箱梁模板清理、喷涂装置在现场应用中, 整体运 行状态良好, 清理、喷涂效率比传统人工作业提高明显, 安全可靠、操作简单, 能够满足梁场清理、喷涂等要求。
5 结束语
箱梁清理喷涂装置研制, 减少施工人员投入, 提高 了模板清理、喷涂效率及自动化程度, 且具有较高可靠 性和安全性。现场应用表明, 通过 PLC 控制器、 MCGS 组态软件结合, 实现了整套装置运行控制及人机交互。 该装置研制取得了一些成果,但还存在很多不足,如装置 体积大、转移存在不便等, 仍需继续研究优化, 实现小 型化、智能化, 最大程度降低人力消耗, 提高作业效率。
参考文献:
[1] 刘凯 , 闫彬彬 . 桥梁预制箱梁施工工艺及质量控制要点探析 [J]. 黑龙江交通科技, 2021. 44(10):2.
[2] 高崇 . 论预制箱梁施工工艺[J]. 合作经济与科技,2012(4):1-20.
[3] 马娜飞 . 桥梁预制箱梁施工技术及质量控制要点[J]. 中国新技 术新产品,2020(20):1-22.
[4] 廖良芳,钟芳清 .PLC 和变频器在控制系统的应用[J]. 现代制造 技术与装备,2017(10)163- 165.
[5] 郑华平 . PLC 在工业自动化控制中的应用研究[J]. 低碳世界, 2018(8):375-379.
[6] 魏明明,金锐, 闻春华 . 温湿度传感器校准结果的不确定分析 与评定[J]. 电子测量技术,2018.41(8):32-35.
[7] 王德吉 . 西门子工业网络通讯技术详细[M]. 北京:机械工业出 版社,2012.
[8] 胡江 . 关于西门子 PLC 控制系统工作原理及常见故障应用分 析[J]. 山东工业技术,2019(8):168- 171.
[9] 王云刚, 陈文燕 . 基于 MCGS 和 PLC 的水位自动控制系统设计 [J]. 测控技术,2014.33(1):96-98.
[10] 闫志强,刘强 . 触摸屏与 S7-200H 和变频器的连接及应用[J].宝钢科技,2017.43(2):63-67.
[11] 朱小襄 .ModBus 通信协议及编程[J]. 电子工程师,2005(7):42- 50.
[12] 王书根,王振松,刘晓云 .Modbus 协议的 RS485 总线通讯机的 设计及应用[J]. 自动化与仪表,2011.26(5):25-28.
[13] 刘宏晔 . 西门子人机界面与虚拟仿真应用技术[J]. 电子技术 与软件工程, 2019(2):56-72.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58518.html