SCI论文(www.lunwensci.com)
摘要:针对于湖泊、人工湖、景区等小型水域的水面垃圾的清理等水域的垃圾污染物清理问题, 提出一种高效、简便、低成本的 水上垃圾清理设备。首先, 设计了一种智能自动巡航、遥控到达指定水域位置进行水面漂浮垃圾清理清理的装置, 然后通过运用 SolidWorks 对该装置的外形、垃圾收集器、排水装置、系统动力进行设计及建模, 并运用流体动力学方程进行分析。最后, 搭建了 测试实验平台进行了垃圾回收效率和设备运行实验, 并结合实验结果对仿真设计结果进行了验证。研究结果表明: 设计的垃圾收 集装置对面积小于等于 800 m2 的水域垃圾回收效率提高了 60%, 垃圾回收成本降低了 50%, 设备运行稳定且良好, 可以持续运 行 8 h。与普通垃圾回收器相比, 有效解决了小型水域、浅水面的漂浮垃圾回收问题。
Design of Artificial Intelligence Aquatic Garbage Cleaning Device Based on SolidWorks
Yang Haisen, Yang Zengrui, Li Hongrui, Jin Jietian
(Lanzhou Modern Vocational College, Lanzhou 730300. China)
Abstract: Aiming at the problem of cleaning up waste pollutants in small water areas such as lakes, artificial lakes and scenic spots, an efficient, simple and low-cost water waste cleaning equipment is proposed . First of all, an intelligent automatic cruise, remote control to the designated water location floating garbage cleaning device is designed . Then the device's shape, garbage collector, drainage device, system power are designed and modeled by using SolidWorks, and analyzed by using the fluid dynamics equations. Finally, a test platform is built for garbage recovery efficiency and equipment operation experiments, and the simulation design results are verified by combining the experimental results. The results show that when the water area is not more than 800 m2 , the garbage collection device can improve the garbage recovery efficiency by 60% and reduce the garbage recovery cost by 50%. The equipment runs stably and well, and can run continuously for eight hours. Compared with the common garbage collector, it effectively solves the floating garbage recycling problem in small water area and shallow water surface.
Key words: surface garbage; intelligent robot; governing equation
0 引言
湖泊、人工湖、景区等小型水域的水面垃圾污染比 较严重, 这给人们生活和生存环境带来了很大的影响。 水面垃圾处理智能装备没有大力推行, 相对于人工、机 械打捞方式, 使用者在需求方面对于成本的高低、水面 垃圾收集的效率、收集的效果、使用的安全、产品安装 的方式都有所不同。各国均对水域废弃物打捞装置进行 了研究, 如 BIAN Huai-qiang 等[1]设计了一种水面废弃物 清理船, 并对动力推进装置的推进轨迹进行了分析研究。 CHEN Shi-yong 等[2]设计了一种多用途垃圾清理船, 对水 面漂浮垃圾的环保高效收集功能进行研究。多数使用 者首先考虑成本是否低于人工, 效率效果是否大于预 期, 以及在不同水域投放的安全性高低。传统的打捞 方式耗费了巨大的人力、物力和财力, 但效果甚微。
随着近些年水污染防治行动计划政策的出台, 国家 进一步加大水污染防治工作力度, 水面污染处理呈现了 扩容之势。水面垃圾打捞及处理需求急剧上升, 而原有 的传统打捞方式成本高、效率低、安全性能低。市场急 需一款资源配套、易维护的水面垃圾处理设备。
本文设计了一款水上漂浮垃圾收集设备。首先通过 SolidWorks 进行 三 维 建 模 和 分 析, 对 该 装 置 的 外 形 、 垃圾收集器、排水装置、系统动力进行建模设计, 然 后, 对太阳能电池板的持续发电、储电、动力输出性 能进行测试, 最后对设备收集漂浮垃圾的效率进行综 合检测[3] 。
1 智能水上垃圾桶总体方案
1.1 设计原理
该设备是通过水流、自身动力行进, 利用抽水泵和收集网进行水面碎片垃圾的收集与处理, 是一款可以自 主运行的水面清障设备[4-5]。产品具有安装布放快、全天 候工作、利用太阳能清洁能源、可更换内胆等优势。产 品外观设计为圆柱体桶状, 使用光伏多晶硅蓄电充电电 池作为动力源, 利用太阳能光伏储能胶体蓄电池提供使 用电能, 桶内安装可拆卸式内胆及抽水泵, 桶底设有排 水孔, 由固定支架对位置进行定点安装。产品在工作的 过程中加装水下推进器行进, 使产品进行巡航作业, 桶 壁内设有水舱, 设置水压力传感器, 桶底部设置上浮推 进器, 对产品的浮力平衡做调整, 桶壁外安装水下摄像 头进行障碍识别, 并加装水质检测器等平台对本产品进 行升级, 进一步地使产品走向智能化[6-9]。
1.2 设计要求
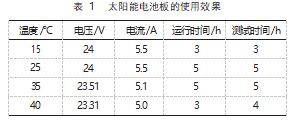
( 1) 选用 1 000 W 太阳能滴胶光伏多晶硅 12 V 蓄电 充电电池作为动力源, 环保、高效、无污染, 电流为 5.5 A, 电压为 24 V, 为本产品无限循环提供动力。并且 解决本产品的配重问题。在不同的环境和温度下太阳能 电池板的使用效率测试效果如表 1 所示。
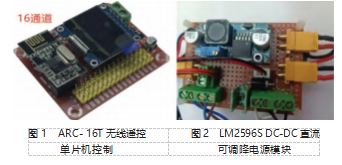
( 2) 方向控制采用性能优良的 ARC- 16T 无线遥控 单片机控制器 (图 1), 使数据寄存在其中, 包括加速度 计、辅助传感器和温度测量数据。由于是只读寄存器, 可通过串行接口数据读取。其特点是精确跟踪快速和慢 速的运动, 从而使垃圾桶能通过遥控控制精准到达垃圾 的位置, 保证了设备的准确性。同时设备可无线遥控测 控距离与精准度进行测量。使用电压为 12 V, 输入电 流 20 mA。
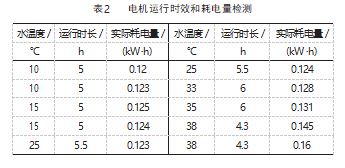
( 3) 采用 2418 无刷 PMW 电机, 让垃圾桶随时、即 时开始工作, 以防止无垃圾时不工作而消耗电能, 本设 计灵活, 轻便, 转速较高[10]。对电机运行时效和耗电量 做了实验测试, 结果如表 2 所示。
设备在不同的运行环境中所消耗的电能不同, 水温 在 15 、20 、25 ℃时, 所消耗的电能基本相同, 当水温在 38 ℃时消耗的电能较多, 但是太阳能电池板所提供的电 能能够支撑设备的运行。
( 4) 采用柔性设计技术。该装置具有一定的柔性, 大大改善了垃圾桶工作的稳定性, 从而增加了工作的可 靠性, 能快速遥控到达指定水域, 提升工作效率。
( 5) 采用 LM2596S DC-DC 直流可调降电源模块稳压 表, 实现电路通畅, 消除功率过大产生的负载, 使电路 起到短路过载的保护作用。如图 2 所示。
2 设计方案
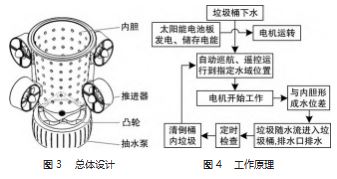
当设备下水时, 并不收集垃圾, 也就是说垃圾桶内 胆不工作, 太阳能电池所提供的电能只是用于航行, 只 给推进器提供电能。当设备运行到了漂浮垃圾区域时, 内胆开始工作, 首先底部凸轮水平运行, 使内胆与桶外 壳形成水位差, 漂浮垃圾随水流进入垃圾桶内, 流入桶 内的水由底部的抽水泵抽出垃圾桶, 此时垃圾回收开始 正常工作,形成一个闭环回收系统。当收集器里垃圾收满 时, 巡航到岸边倾倒[11- 15]。设备总体设计图如图 3 所示。
2.1 设计路线图
为了更加直观的表现出设备的工作流程, 现将设备 运行的工作流程导入 EdrawMax 软件中进行后处理, 得到 的流程如图 4 所示。
2.2 动力系统
2.2. 1 100 W 单晶太阳能板
由若干个单晶硅太阳能电池片按一定方式组装在一 块板上的组装件。光电转换效率为 15% 左右, 最高的达到 24%, 这是所有种类的太阳能电池中光电转换效率最 高的, 由于单晶硅一般采用钢化玻璃以及防水树脂进行 封装, 因此其坚固耐用, 使用寿命一般可达 15 年, 最高 可达 25 年。
2.2.2 42BLF1004-240 直流无刷电动机
由电动机主体和驱动器组成, 直流电机具有响应快 速、较大的起动转矩、从零转速至额定转速具备可提供 额定转矩的性能, 电动机的定子绕组多做成三相对称星 形接法, 其功能是: 接受电动机的启动、停止、制动信 号, 以控制电动机的启动、停止和制动; 接受位置传感 器信号和正反转信号, 用来控制逆变桥各功率管的通断, 产生连续转矩; 接受速度指令和速度反馈信号, 用来控 制和调整转速; 提供保护和显示等等。
2.2.3 PR93-125 水下推进器
水下动力推进设备结构包括壳体、 驱动组件、驱动 轴、第一叶轮和第二叶轮。壳体内设置有流体通道和容 置腔, 流体通道包括进水口和排水口, 流体通道内设置 有增压区, 增压区的内径沿排水方向递减。驱动轴与驱 动组件连接, 驱动组件设置在容置腔内。第一叶轮固定 连接在驱动轴上, 第二叶轮可转动连接在驱动轴上, 第 一叶轮位于第二叶轮的上游位置, 第二叶轮位于增压区 的内部。驱动组件通过驱动轴带动第一叶轮转动, 第一 叶轮使水流推进至增压区内。位于增压区内的第二叶轮 使水流加速并喷射至排水口外, 进而增加推进力, 使水 下推进器的推进动力得到提升, 改善驱动效果。
本文采用 100 W 单晶硅太阳能光伏板和 12 V 蓄电充 电电池, 为设备提供动力, 直流无刷电机工作使内胆与 水面形成 3 cm 的水位差, 垃圾随水流进入垃圾桶, 垃圾 桶下方有排水口, 通过抽水泵将水排出。垃圾桶可持续 进行垃圾收集, 且在收集满垃圾桶后可以取出更换网兜。 由于设备长时间在水中工作, 要做到防腐蚀性、抗冲击 性、使用寿命长。
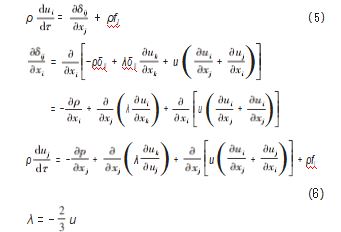
3 控制方程
水流入桶内口的流入量满足质量守恒方程。质量增 加率为:
式中: x 为坐标系中的 i 方向分量; u 为流体质点在 i 方向 的平均速度分量; i=1. 2. 3; ρ 为空气密度。动量守恒方程为:
Navier-Stokes 方程 (N-S 方程) 是不可压流体理论 中最根本的非线性偏微分方程组, 是现代流体力学的主干方程, 描述水流流入口用 N-S方程进行分析, 则有:
4 仿真及实验结果
4.1 入水口数据分析
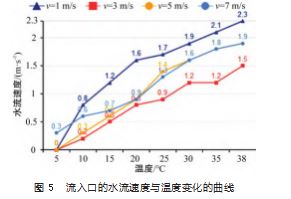
为了更加直观地显示在入水口处、内胆, 受温度与 水流的流速及漂浮物的流入速度的变化趋势, 将内胆受 温度及水流速度精选不同的值导入 origin 软件中进行后 处理, 得到流入口的水流速度与温度变化的曲线如图 5 所示。
水流流入桶内的速度受温度、时间变化影响不大, 与设备所在区域垃圾的多少、大小有关[8]。当温度达到 2 ℃, 水面与漂浮物形成结冰状时, 水流、垃圾飘入桶 内的速度减弱, 此时垃圾回收的速度减弱。设备运行受 到水面结冰状态影响时, 设备运行的速度减弱, 并且电 池的消耗也相对地增大到 1.5倍。所以, 温度低于 0 ℃时 设备不适合运行。
设备在水温 15~35 ℃的区间段内运行时, 水面没有 絮状结冰现象, 设备运行通畅, 随着设备的运行, 漂浮 物与水流同时流向垃圾桶内, 设备消耗的电量稳定。
设备在水温 38~42 ℃的区间段内运行时, 运行畅通 且良好, 发电和用电消耗良好, 此时漂浮物 2 段内流入 的更快一点。
4.2 SolidWorks 有限元分析
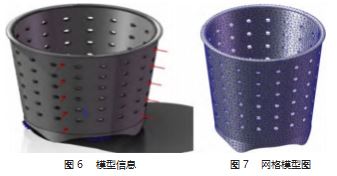
为 了 更 好 地 进 行 样 体 分 析, 把 内 胆 三 维 图 在 SolidWorks 中导入, 进行了静应力分析, 生成模型信息 如图 6 所示。
模 型 参 数 如 下: 质 量 为 5.347 54 kg; 体 积 为 0.005 617 17 m3;质量密度为 952 kg/m3;重量为 52.405 9 N。 算例属性包括 SOLIDWORKS Flow Simulation 中的液压效 应, 零应变温度 298 K, 弹性模量为 1.07×109 N/m2; 泊松 比为 0.410 1; 抗剪模量为 3.772×108 N/m2.
4.2.1 网格划分
材料为 PE 高密度, 模型类型是线性弹性同向性, 张 力强度为 2.21×107 N/m2. 为了使分析更加精确, 保证内 胆的质量和在水域内工作时网格不破裂, 进行了网格划 分, 采取网格类型为实体网格, 所用网格器为标准网格, 高质量网格的雅可比点 16 点, 单元大小 14.633 1 mm, 公 差为0.731 654 mm。网格细节如表3所示。
为简化网格计算, 对网格的细节进行了分析, 还对 网格的 4 个面进行了不同的受力分析, 设备在工作时, 应严格保证内胆的质量, 以保不破损。从合力分析看出 内胆在受力只受自由实体的 X、Y、Z 总和力有一定的影 响, 对自由体力矩只有合力的力矩。算例结果及合力分 析如表 4 所示。
4.2.2 应力分析
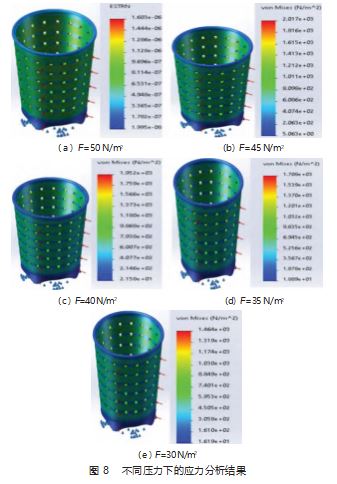
为了实现在不同的水域内设备运行, 对设备的内胆所承受的压力进行了分析, 在不同的水域内, 水域面积 为 800 、500 、300 、 100 m2. 水流速度不同, 水流的大 小为 0 、0.1 、0.5 、0.8 、1 、1.2 m/s 的情况下所承受的水 面 压 力 不 同, 分 别 对 压 力 的 情 况 为 50 、45 、40 、35、 30 N/m2 进行了静应力 von Mises 应力分析, 分析结果如 图 8 所示。
可以看出, 在不同的水域内内胆的压力不同, 所受 外力的影响较小, 在外壳的保护下, 内胆能够保证正常 运行。凸轮运转时, 桶内的水流、垃圾的重力为内胆主 要的受力, 凸轮上下运转时的外力起破坏作用, 其余与 内胆无联系。在设备工作的小型水域内, 内胆能承受压 力, 可以无限次重复使用。
4.3 实验
依据上述设计要求、设计过程和仿真模拟实验设计 出初代产品, 如图 9 所示。
设备在面积为 800、500、300、100 m2 的水域, 气温 在 15~35 ℃的气温条件下做了垃圾漂浮物回收实验, 运 行时间为 5 h。为保证垃圾回收的效率, 蓄电池里的电量 是先充满后直接安放到设备上的。
实验过程:为了保证实验的效果,先在某地的 500 m2 人工湖内进行巡航实验, 此地水深 1.5 m, 运行 5 h, 湖 内水无流速。蓄电池电量已充满, 设备安装完后下水, 此时设备的主要用电量是舵机, 垃圾桶不工作, 设备自 身的巡航功能自动巡航。手动遥控至垃圾位置, 此时垃 圾桶开始工作, 底部凸轮机构运转, 内胆与水面形成水 位差, 垃圾随水流流入桶内, 桶内底部有抽水泵把桶内 的水排出, 依次循环工作, 进行垃圾回收, 漂浮物如树 叶、碎纸屑、饮料罐等随着水流进入垃圾桶回收器内, 当内桶垃圾装满时, 再遥控到岸边取出内胆倾倒垃圾, 再次遥控巡航到垃圾漂浮处收集垃圾。
垃圾回收实验分别在 800、500、300、100 m2水域内 进行, 实验过程如上述所示, 水域内无水流速度, 设备 靠推进器巡航。实验结果表明: 设备的运行与水域面积 的大小无关, 与水域内的漂浮物的多少、大小有关, 电 池的电量在工作状态下可以运行 3 h。
在有水流速度的水域内进行实验测试: 水流速度不 大于 1.5 m/s 时, 垃圾桶航速为 0 m/s 时设备能回收垃圾 区域 30%。水流速度不大于 1 m/s 时, 设备能回收 40% 区 域的漂浮垃圾。水流速度大于等于 1.5 m/s 时, 水流的速 度大于垃圾桶的航速, 设备运行速度小于漂浮物速度, 几乎不能回收漂浮物。
漂浮垃圾回收实际情况如图 10所示。
5 结束语
本文设计的人工智能水上垃圾桶主要是针对小型的 人工湖、湖泊, 水流流速较小情况下的水面垃圾清理, 从设备的外形设计、设计要求和需要满足的范围, 理论 控制方程, 形成初代产品, 再到设备下水实验验收。研 究结果和过程总结如下。
( 1) 设 备 属 于 轻 型 化 设 计 , 总 体 尺 寸 为500 mm×200 mm× 180 mm, 质 量 为 5 kg, 设 计 者 采 用 SolidWorks 进行了三维设计, 主要对外形、排水系统、 内胆、巡航系统、垃圾回收装置进行了设计, 装配。
( 2) 对设备的工作系统进行优化, 排水系统采用圆 形凸轮机构设计, 使水面与内胆形成水位差, 使水流不 断地流入桶内, 桶底采用无刷直流 HG-028B水泵抽出桶 内余水, 形成无限循环。
( 3) 实验时主要对实验场所的水流流速不同的水域进 行了测试, 测试结果显示: 本设备属于轻型设备, 质量小, 适合于水流流速小于1 m/s 的水域和无水流的水域收集漂浮 物。温度对于设备的影响较小, 但当温度低于2 ℃时, 水面 形成絮状的冰渣,设备行进和漂浮物随水流进入的速度减 弱, 使设备的工作效率减弱。当水面结冰时, 设备不能运行。
从设计到实验检测和实际下水测试, 结果表明, 此 设备有效解决了快速清理水域漂浮物垃圾的问题, 提升 了小型水域漂浮物的回收效率。
参考文献:
[1] Bian H Q,Hang L B,Huang L X,et al. A Propulsion Mechanism of Cleaning Boat Applied For Non-Structural Environments[J]. In⁃ ternational Journal of Research in Engineering and Science, 2015 (1):40-47.
[2] HUANG Y S, HSU FL. Mechanism of cracking failure incurved stems due to transverse stress under a bending moment[J]. Jour⁃ nal of Theoretical Biology, 2021.509(21):731-741.
[3] 张博一,李秋稷,王伟,等 . 汽轮发电机组弹簧隔振基础模型动 力特性试验[J].哈尔滨工业大学学报,2015.47(4):37-43.
[4] Lan C C,Wang J H,Chen Y H. A compliant constant-force mecha⁃ nism for adaptive robot end-effect or operations[C]//Robotics and Automation (ICRA), International Conference on IEEE, 2010.
[5] SELVATHAI T,JAYAA S S,RAMESH S, et al. Automatic inter⁃ pretation of analog dials in driver's instrumentation panel[C]//2017 Third International Conference on Advances in Electrical Electronics, Information, Communication and Bio-Informatics.
[6] 刘伯运, 赵帅, 赵强强, 等 . 水面垃圾清理机器人[J].兵工自动化, 2022.41(2):92-96.
[7] 江笑雨,陈加粮,周浩岚,等 . 小型水面垃圾清理机器人的设计 与实现[J]. 吉首大学学报(自然科学版),2021.42(3):41-44.
[8] 张智源,常明堂,宋佳运,等 .基于生态设计的城市水上垃圾清 理船设计研究[J].科技创新导报 . 2019.16(32):108-110.
[9] 杨辉,章亚男,沈林勇,等 . 下肢康复训练机器人减重支撑系统 的研究[J]. 机电工程,2009.26(7):29-31.
[10] 田志昌,于亚东 . 高位水箱改造成调谐液体阻尼器的设计与 分析[J]. 山东农业大学学报,2017.11(2):2-5.
[11] 高晓红 . 一种小型水面垃圾清理装置的研究与设计[J]. 海南 大学学报(自然科学版), 2019. 37(3): 254-260.
[12] 袁斌华, 高晓红, 张彬, 等 . 小型水面垃圾清理船的设计与实 现[J]. 陇东学院学报, 2017. 28(1): 24-29.
[13] 张 国 洲 , 朱 晨 炜 , 卢 加 津 , 等 . 一 种 水 面 垃 圾 清 理 机 器 人 [J]. 兵工自动化, 2020. 39(3): 90-92.
[14] 陈玲, 高洁 . 一种新型水面垃圾清理分拣船的设计[J]. 船舶 工程, 2020. 42(2): 39-43.
[15] 赵阳, 赵飞, 李依帆, 等 . 一种水面清洁机器人及其系统设计 [J]. 科技风, 2019(32): 28.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65081.html