SCI论文(www.lunwensci.com)
摘要:为了能够自动清理湖泊、鱼塘等浅水开放水域表面漂浮的垃圾,设计了一种基于视觉引导的新型水面垃圾清理机器人。详细阐述了该水面垃圾清理机器人的功能、机械结构、硬件架构和工作原理。该机器人控制系统采用以树莓派3B为核心的嵌入式主控单元,由Arduino UNOR3与两个螺旋桨的电调构成运动驱动单元,依靠无刷电机带动螺旋桨提供动力。借助于由机器人视觉传感器采集得到的图像数据,基于训练的KNN算法,进行机器人周边环境漂浮垃圾的识别、定位与追踪,实现了垃圾清理机器人的自主视觉引导运动与垃圾的自动清理。实验结果表明,该机器人能够完成水面垃圾的自动识别与定位,且螺旋桨同步补偿效果较好,能够稳定地实现水面垃圾的自动清理。相比人工方式,该机器人的作业效率大幅提升,有广泛推广的价值。
关键词:水面垃圾;视觉引导;目标跟踪;自主收集
Design of Water Surface Garbage Collecting Robot Based on Visual Guidance
Ren Wenjing1,Li Yi2,Liang Ziming2,Diao Shipu2,Wang Zhihong1,3
(1.School of Humanities and Management,Guilin Medical University,Guilin,Guangxi 541000,China;
2.School of Mechanical and Electrical Engineering,Guangdong Polytechnic Normal University,Guangzhou 510665,China;
3.The Second People’s Hospital of Shenzhen,Shenzhen,Guangdong 518000,China)
Abstract:In order to automatically clean up the garbage floating on the surface of shallow open water such as lakes and fish ponds,a new surface garbage collecting robot based on visual guidance is designed.The function,mechanical structure,hardware architecture and working principle of the surface garbage collecting robot are described.The designed robot control system adopts the embedded main control unit with Raspberry PI 3B as the core.The motion driving unit is composed of Arduino UNOR3 and the electric modulation of two propellers,and the propellers are driven by brushless motors to provide power.Based on the image data collected by the robot vision sensor and the trained KNN algorithm,the floating garbage in the surrounding environment of the robot is identified,located and tracked,and the autonomous visual guidance movement of the garbage cleaning robot and the automatic garbage cleaning are realized.The experimental results show that the robot can automatically identify and locate surface garbage,and the propeller synchronous compensation effect is good,and it can realize the automatic cleaning of surface garbage stably.Compared with the manual method,the robot designed in this paper greatly improves operation efficiency,and has the value of wide promotion.
Key words:surface garbage;visual guidance;target tracking;autonomous collection
0引言
湖泊的漂浮垃圾是一个严重的环境问题。这些垃圾可能来自城市排水、游客活动、附近的农业活动等,不仅破坏了湖泊的自然美,还可能对水生生物造成伤害。漂浮垃圾主要包括塑料瓶、塑料袋、食品包装、烟蒂等。这些垃圾在水中漂浮,不易降解,长期存在可能导致水质恶化[1]。为了解决这个问题,许多地方已经采取了行动。例如,一些城市已经开始定期清理湖泊的漂浮垃圾。还有一些地方使用特殊的设备,如自动垃圾收集船,来收集和清理漂浮垃圾[2]。
此外,我国江河众多,水域面积宽广。然而,部分水体富营养化引发的蓝藻、水葫芦等水生植物疯狂生长,塑料瓶、食品包装袋等垃圾,以及枯枝、落叶的堆积,却让部分水域受到污染影响观感,甚至影响水环境和水生态[3]。传统的水上清污,主要依靠人工打捞,不仅难度大、效率低、效果差,而且对打捞人员也存在着较高风险。因此,设计和制造一款能够自动巡航、识别和打捞水面漂浮物的机器人就显得尤为重要。
国内外对水面垃圾清理机器人开展了多年的研究工作[4-8],在机器人结构方面,开展了双船体、单船体和仿生机器人等结构形式的研究;在垃圾收集方式方面,开展了带传动、叶轮造流、翻斗和流体涡旋式的收集形式;在动力部件方面,开展了螺旋桨、叶轮和明轮等驱动方式的研究。中国科学院合肥智能机械研究所,对水面垃圾清理机器人的动力系统、自动控制、通信数据传输以及智能决策等技术开展了深入研究,研发出“风光互补”自主式水面机器人,其动力来源于大容量电池、风力和太阳能发电混合电源系统,解决了水面机器人长时间持续巡航的动力问题[9];大连海事大学利用捷联惯导系统、全球定位系统和电子罗盘建立水面机器人位姿信息融合结构,通过优化卡尔曼滤波框架,解决水面机器人的高精度位姿信息融合问题,并通过大量仿真验证和比较分析验证了所提出算法在抑制融合结果波动方面的优越性,提高了水面机器人紧耦合位姿信息融合精度[10];中国科学院沈阳自动化研究所针对水面机器人水动力学的强非线性,且容易受到风、浪与水流干扰的影响,提出了一种基于线性变参(Linear Parameter Varying,LPV)模型的H∞鲁棒航向保持控制器。LPV模型采用Froude数作为线性变参,用来反映水面机器人水动力学随Froude数变化的非线性特性,同时简化模型参数辨识与控制器设计[11]。但是价格适中的垃圾自动清理机器人的视觉引导方法,还需要进一步开展针对性的研究。
本文提出一种结构简单、成本低廉、实用性强、循环作业的水面垃圾清理机器人,可快速完成水面漂浮垃圾的快速清理,并能够通过视觉传感器实现机器人的自主返航。文中详细描述了该机器人的功能、机械结构、硬件架构和工作原理,尤其对视觉引导方法做了详细的介绍。
1结构设计
1.1捕捞装置
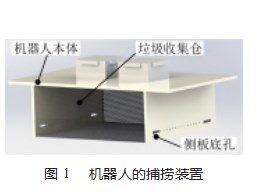
水面垃圾清理机器人的捕捞装置(如图1所示),由机器人本体、垃圾收集仓、侧板底孔等部分构成。垃圾收集仓与机器人本体,按照一体化设计,提高了机器人空间利用率;水流从侧板的底孔流出,形成负压,提高了捕捞漂浮垃圾的成功率。
1.2浮力装置
水面垃圾清理机器人的浮力装置对称分布于机器人两侧,用塑料瓶代替传统的气囊和浮袋,根据浮力公式:
1.3其他部分
水面垃圾清理机器人的推进装置采用无刷电机,具有强大的推动力,转速高、耐腐蚀、韧性强、使用寿命长,结合与其配套的微控制器,能够实现水面垃圾清理机器人向目标物移动的快速、灵活控制。水面垃圾清理机器人的密封装置,采用塑胶圈压缩密封防水技术,通过对密封圈施压稳定的径向力,使得密封圈弹性变形,从而具备所需的防水功能。
2硬件设计
水面垃圾清理机器人的嵌入式系统硬件架构如图2所示,由树莓派3B板卡作为主控单元、由Arduino UN⁃OR3与两个螺旋桨的电调构成运动驱动单元,这两个单元通过串口进行双向通信。借助于与树莓派板卡相连接的摄像头,对周边环境中漂浮的垃圾等目标物进行视觉感知;从而实现机器人在水面漂浮垃圾清理过程中,对目标物的追踪和对机器人的精准运动控制。
2.1树莓派3B控制板
水面垃圾清理机器人的主控单元如图3所示。该控制单元基于ARM的微型电脑主板,具备计算机的基本功能,可以直接控制其他底层硬件[12]。因此,该主控单元可以通过远程调试,发送所需的运动控制指令给电机控制单元。
2.2基于Arduino UNOR3的电机控制模块
机器人的电机控制模块由Arduino UNOR3、无刷电机电调和无刷电机构成,如图4~6所示。Arduino UNOR3采用ATMEGA16U2芯片[13],控制便捷灵活,有简便的编程环境IDE,且支持SPI、IIC和UART串口通信,因此适合构建模块化的电机控制单元;无刷电机的电调为40 A双向电调,BEC输出为5 V/3 A,最高电流为40 A,能够满足推力为10 N、最大电流为20 A的无刷电机的驱动需求。
2.3分布式电源模块
分布式电源模块由3s15c 800 mAh航模电池(如图7所示)和5 V稳压电源模块(如图8所示)构成,其中3s15c 800 mAh电池为水面垃圾清理机器人的两个螺旋桨提供能量,5 V稳压电源模块则为树莓派3B主控模块供电。
2.4视觉传感器
3软件设计
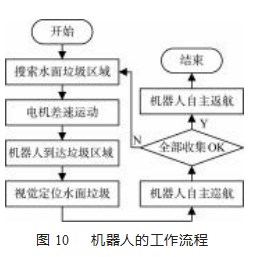
水面垃圾清理机器人的工作流程如图10所示,首先机器人在起始位置,启动后立即启动视觉系统,搜索出垃圾分布的位置;然后通过主控单元发出指令到电机驱动单元,驱动机器人到垃圾区域;接着使用机器人的视觉定位算法,引导机器人自主巡航,完成水面垃圾的清理;最后通过视觉引导,使得机器人自动返航。
这里的视觉检测主要采用k近邻(k-Nearest-Neigh⁃bor,KNN)算法[14-16],k近邻算法是一种监督学习算法。在KNN算法中,距离参数的度量描述了训练样本与测试样本的接近度。如果特征连续,则距离函数采用曼哈顿距离或者欧氏距离;如果特征不连续,则采用汉明距离[17]。假设I1和I2是两个不同的样本,p为某维度上特征的数量,那么曼哈顿距离的计算公式为:
4实物制作与实验测试
4.1总体设计与实物制作
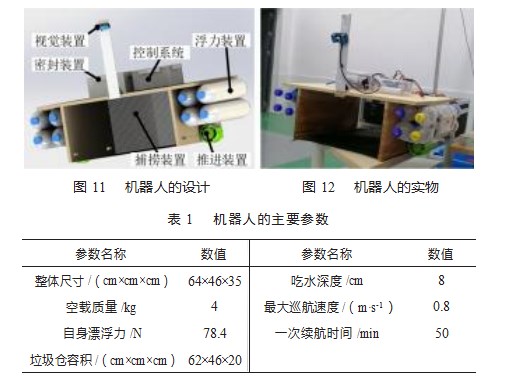
遵循追求平稳、节约成本、机动灵活的设计理念,所设计的水面垃圾清理机器人如图11所示,水面垃圾清理机器人采用中部收集和存储漂浮垃圾的结构,由捕捞装置、推进装置、浮力装置、控制系统、视觉装置、密封装置、超声传感等构成,如图12所示,其主要参数如表1所示。
4.2试验场景
根据上述设计架构,获得性能较为稳定的机器人系统后,进行了大量的现场试验,如图13所示。
4.3实验测试
4.3.1漂浮垃圾检测实验
为了检测水面漂浮的垃圾,采用KNN算法来实现目标物的分类与检测。具体为:首先利用OpenCV图像处理算子对水面采集到的RGB数字图像进行图像预处理,从而获得效果最佳的二值化图像,以便得到更高的目标预测准确率[18-20];然后使用KNN算法,对水面的漂浮垃圾进行目标检测与定位。实测结果如图14所示。
4.3.2电机驱动实验
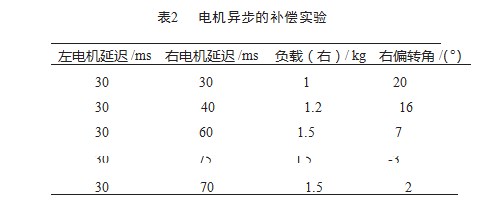
实验发现,水面垃圾清理机器人左右的两个螺旋桨有自身的转速性能差异,可能会导致机器人运动不平稳的问题,出现右电机转速快于左电机的现象。为了解决这个问题,提出电机异步的补偿方法,并通过大量的实验总结出了所需的异步补偿参数。当占空比为0.7时,偏转角对应的延时补偿值和偏转角补偿值如表2所示。
5结束语
本文阐述所设计的水面垃圾清理机器人的功能、机械结构、硬件架构和工作原理。机器人控制系统的主控单元为树莓派3B,运动驱动单元由Arduino UNOR3与两个螺旋桨的电调组合而成。机器人的动力系统主要是由无刷电机驱动的螺旋桨,为机器人跟踪、接近和收集目标物提供动力。机器人视觉引导系统采用RGB视觉传感器,基于训练的KNN算法,对视觉数据进行处理,实现机器人周边环境漂浮垃圾的识别,定位与追踪。实验结果表明,该机器人能够完成水面垃圾的自动识别与定位,能够自动完成水面垃圾的自主收集,具有较好的商业推广价值。但是,大水域分布的漂浮垃圾的收集需要较长的续航距离,下一步,将进行能源自动补充方面的研究。
参考文献:
[1]江笑雨,陈加粮,周浩岚.小型水面垃圾清理机器人的设计与实现[J].吉首大学学报(自然科学版),2021,42(3):41-44.
[2]张国洲,朱晨炜,卢加津,等.一种水面垃圾清理机器人[J].兵工自动化,2020,39(3):90-92,96.
[3]褚世旋,徐佳宁,王相晔,等.近海岸水面垃圾清理器[J].工程机械,2022,53(8):122-126,13.
[4]刘瑾,高增亮,钱明星,等.水面垃圾清理设备的研究现状及发展趋势[J].机电产品开发与创新,2022,35(5):82-84,97.
[5]李文华,张君彦,林珊颖,等.水面自主船舶技术发展路径[J].船舶工程,2019,41(7):64-73.
[6]严汝建,庞硕,孙寒冰,等.水面无人船的发展与使命(英文)[J].Journal of Marine Science and Application,2010,9(4):451-457.
[7]谷湘煜,祝礼佳,柳胡南,等.基于空时域信息融合的水面垃圾显著性检测[J].电子测量技术,2022,45(11):154-160.
[8]王一早,马纪颖,罗星,等.基于SPMYOLOv3的水面垃圾目标检测[J].计算机系统应用,2023,32(3):163-170.
[9]王猛.基于激光雷达检测的水面机器人路径规划和避障方法研究[D].合肥:中国科学技术大学,2021.
[10]陈帅.水面机器人多传感器位姿信息融合研究[D].大连:大连海事大学,2023.
[11]熊俊峰,何玉庆,韩建达,等.基于LPV模型的水面机器人鲁棒航向控制[J].系统仿真学报,2020,32(8):1598-1605.
[12]李再天,王龙祥.Python硬件开发树莓派从入门到实践[M].北京:吉林大学出版社,2021.
[13]郭付阳,董文方,池桂林.基于Arduino UNO R3的画画写字机的设计与实现[J].动力系统与控制,2023,12(3):173-185.
[14]ZHANG H,BERG A C,MAIRE M,et al.SVM-KNN:discrimi⁃native nearest neighbor classification for visual category recog⁃nition[C]//2006 IEEE Computer Society Conference on Comput⁃er Vision and Pattern Recognition(CVPR’06),New York:IEEE,2006.
[15]李蓉,叶世伟,史忠植.SVM-KNN分类器——一种提高SVM分类精度的新方法[J].电子学报,2002,30(5):745-748.
[16]张慧,陈丹丹,邵静,等.基于KNN算法与logistic回归的代谢综合征风险预测模型构建与对比研究[J].重庆医学,2023,52(13):2019-2023,2029.
[17]侯玉婷,彭进业,郝露微,等.基于KNN的特征自适应加权自然图像分类研究[J].计算机应用研究,2014,31(3):957-960.
[18]叶娜.基于OpenCV的数码管字符识别[J].机电工程技术,2021,50(11):196-198,239.
[19]陶星珍,李康顺,刘玥.基于深度学习模型LeNet-5-L的车牌识别算法[J].计算机测量与控制,2021,29(6):181-187.
[20]刘盼盼,郝景新,杨滨,等.基于参照物和图像处理的节子大小测量方法[J].林业工程学报,2023,8(5):146-151.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/77446.html