SCI论文(www.lunwensci.com)
摘要:通过对 5G 通讯数据传输技术、智能生产线的模块化设计、智能喷涂工艺参数库的建立、智能生产线的柔性化设计、智能生 产线的数字化设计、智能生产线喷涂过程实时感知系统等技术的研发, 将人工智能、数据实时感知、云存储、智能喷涂、喷涂工 艺参数控制、喷涂层质量一致性、漆雾处理与漆料回收、喷涂环保特性、底漆和面漆工序的控制模型等关键共性技术内容引入传 统建材家具喷涂生产线中, 进行相关应用工艺的探索。针对建材家具产品喷涂制造过程的高效率和低延迟, 以及小批量、多品种 的特性, 研发一款具有高智能、低能耗、高可靠性、集成化、标准化、模块化、数字化、柔性化的机器人智能喷涂生产线。该生 产线工艺的应用能够在相对低的设备投入和场地投入的前提下, 喷涂更多形态和工艺类型的工件。同时, 还能够提高涂料利用率, 降低涂料成本; 提高喷涂质量的水平和稳定性, 降低工件返工成本; 提高生产自动化程度, 降低用工成本; 提高生产效率, 在相 同的生产时间内创造更多效益。
关键词:5G,喷涂,机器人,智能生产线研发
Discussion and Application of the Key Technology 5G of Intelligent Robot Spraying Production Line
Hu Song1. Liu Jianyu1. Ke Meiyuan2
( 1. Guangdong Boshuo Coating Technology Co.,Ltd.,Foshan Guangdong 528300. China;
2. Shunde Institute of Vocational Technology, Foshan Guangdong 528300. China)
Abstract: Through the research and development on 5G-communication data transmission technology, modular design of intelligent production line, building of intelligent painting process parameter library, flexible design of intelligent production line, digital design of intelligent production line, real time perception system of painting process etc., a kind of robot intelligent spraying production line was successfully developed. To turn artificial intelligence, real-time perception of data, cloud storage, intelligent spraying, control of spraying process parameters, quality consistency of spray coating, paint Mist treatment and material recovery, environmental protection characteristics of spraying, control models for primer and top coat processes and other key generic technical elements introduction of traditional building materials furniture spraying production line, to explore the related application process. In view of the high efficiency and low delay in the spraying manufacturing process of building materials and furniture products, as well as the characteristics of small batches and multiple varieties, a robot intelligent spraying production line with high intelligence, low energy consumption, high reliability, integration, standardization, modularization, digitization and flexibility was developed. The process of the production line can be applied under the premise of relatively low equipment investment and site investment, spray more shapes and process types of workpieces. At the same time, it can also improve the utilization rate of coatings and reduce the cost of coatings, improve the level of spray quality and stability, reduce the cost of rework, improve the level of production automation, reduce labor costs, improve production efficiency and create more benefits within the same production time.
Key words: 5G;spraying; robot; research and development of intelligent production line
0 引言
从 20 世纪 90 年代汽车工业引入喷涂机器人代替喷涂 机械开始, 喷涂机器人技术应用得到了快速的发展, 并 快速地扩展到各行各业[1]。现今, 欧美、日本等发达国 家在喷涂机器人仿真技术、控制技术、远程再示教技术 等方面积累了生产经验和大量实验数据, 促使喷涂机器人的设计与制造进入产业化阶段。其中比较具有代表性 的 就 是 日 本 的 发 那 科 、安 川 、 三 菱 以 及 瑞 士 的 Asea Brown Boveri 等公司生产制造的机器人产品。虽然我国通 过引进国外领先的机器人技术, 加大了机器人关键技术 的研发, 取得了长足的进步[2.3]。但我国的喷涂机器人技 术和喷涂机器人的工程应用领域上的水平和国外相比有很大的差距, 关键技术与零件依赖于国外进口。随着 5G 时代的到来和人工智能的发展, 工业生产线的智能化越 来越普及, 未来的喷涂智能生产线将是以喷涂机器人为 主体。目前, 现有的人工喷涂装备作业等落后的生产方 式已经不能满足多产品和多漆料的喷涂任务的要求。因 此, 以满足国家建材家具制造业的生产效率和产品质量 提升的重大需求为目标, 进行 5G 智能机器人喷涂生产线 关键技术的探讨及应用研发项目。
本文通过喷涂装备其中的共性、基础性的关键科学 问题以及 5G 通信的机器人智能喷涂生产线共性关键技 术问题, 更深层次地探讨关键性的人工智能、研究智能 喷涂生产线的数字化设计、模块化快速重构与小批量多 品种建材及家具喷涂的柔性制造技术、喷涂过程实时感 知、喷涂生产线故障检测与控制、喷涂参数工艺优化等 技术。导入了机器人、机器视觉、人工智能、 5G 与工业 互联网等功能模块, 通过网络管理平台统一管理。构建 一条高智能、低能耗、高可靠性、集成化、标准化、模 块化、柔性化、数字化、可视化更具备前沿创新技术的 5G 智能机器人喷涂生产线。实现不需要专门 IT 来管理 和配置设备, 流量可视化, 链路透明, 产能、能耗、状 态自动显现等技术的研发目标。解决了在生产过程中工 件品种多、每个工件喷涂时间及加工处理的工序要求存 在差异、工人怠工、生产效率低、质量不稳定、涂料损 耗大等问题。
1 5G 智能机器人喷涂生产线关键技术分析
1.1 基于5G 通信的智能生产线数据传输技术
实现机器人智能喷涂生产线的人工智能化, 必然要 有巨量的数据来训练人工智能平台, 在传统的涂装工艺 中由于家具重量大、体积大和结构形状各异喷涂加工工 件品种多、小批量以及喷涂时间和加工工序要求存在差 异会出现工人怠工、生产效率低下等特点。为实现建材 家具智能生产线能够满足这些特点, 集成化、标准化、 模块化的生产方法, 就要通过 5G 技术、物联网等技术 把建材家具的喷涂工艺组成智能生产线。在物联网和 5G 等技术的支持下, 改造升级单元制造生产线体系, 通过 工业物联网平台实现建材家具智能喷涂生产线。
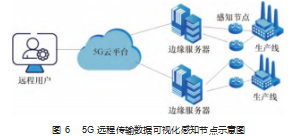
5G 应用技术是衔接生产线设备和数据的重要通道, 在工业场景中 5G 的应用起到了高速率、低时延、移动性 和大容量等作用, 通过 5G 的先进功能提供可靠、实时数 据流, 人工智能应用就能立即生成可行的洞察分析, 从 而实现智能化生产线, 保持高效工作。通过数据采集喷 涂过程的信息, 将感知层获取的海量异构数据通过 5G 无 线通信的方式上传至云平台, 将集成信息技术的系统存 在于云中, 云从资源层收集大量数据, 并通过控制终端 与人的互动, 实现深度集成物理对象和信息技术的人机5G 远程传输与数据可视化系统由生产线的运行状 态参数感知节点、边缘服务器、网络传输子系统、后端 管理子系统组成。感知节点由多源传感器和数据采集控 制器组成, 网络传输采用基于 5G 无线通信的方式, 感知 节点完成现场的数据采集和压缩感知预处理, 然后通过 5G 通信设备将压缩后的数据上传到云平台, 另一方面将 数据传输到边缘节点服务器, 完成运行状态的实时分析 与预测。远程用户通过访问云平台获取现场的实时数据 并进行可视化分析。
1.2 智能生产线的模块化设计
模块化的技术研究及应用于 1930 年, 德国在用模块 化方法设计制造的机床已取得了很好的经济效益, 由此 提出“模块化构造”的设计方法在全世界得到迅速发展。 由于采用模块化柔性生产线,可缩短产品生产周期, 大幅 度提高劳动生产率, 降低生产成本并保证产品质量, 使 中小批量生产创造的价值能与大批量生产抗衡。近年来, 在西欧、美国、日本模块化柔性生产线越来越广泛应用。 Tanaka 等人[6] 提出了一个新的生产系统, 名称为“模块 结构生产系统 (MSP) ”。MSP 由多个生产线和制造执行 系统组成, 生产线是由几个生产单元组成的功能单元。 通过改变生产单元和功能单元的加工产品, 优化生产线, 同时 MSP 向客户订单发送无延迟生产线的信息[7], 缩短 生产线和服务商信息传递时间提高生产效率, 系统能够 完全按照订单生产装配产品, 作为一种有效的多组合多 品种产品的生产系统可以灵活应对各种客户和社会需要。
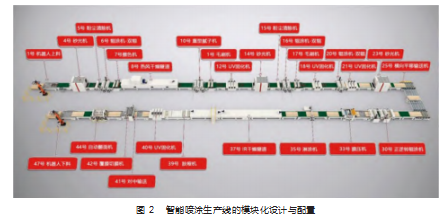
智能生产线模块化的设计是针对个性化、多种类的 家具进行柔性化定制, 根据实际产品加工情况需求, 借 鉴国内外同行业先进科技的生产线装备技术, 进行优化 创新生产线的各个生产单元和功能单元的加工产品技术 组成结构。在模块化生产方式下, 对工业生产过程进行分离、替代、模块增减及创新等模块化操作, 分解为不 同子过程或者创建新的工业过程。通过设定能满足与各 个模块操作相对应的模块接口、自动化、智能化通讯控 制功能, 统一的产品标准条件等模块化所需要求情况下, 进行产品模块组合创新, 实现模块的替换、组合、创新。 实现不同种类的家具在短期内完成生产计划, 降低企业 的生产成本, 最大限度地实现顾客价值, 提高企业的利 润和竞争力。图 2 所示为智能喷涂生产线的模块化设计 与配置。
1.3 建立智能喷涂工艺参数库
喷涂过程的喷涂参数是完成喷涂工作的重要数据, 是衡量喷涂加工正常运作、保证产品质量的关键。面对 日益增多的喷涂数据, 快速有效地提取喷涂工艺参数信 息, 科学地管理喷涂数据将会直接关系到企业的生产效 率与加工成本。工艺参数库的出现, 使得用户可以不用 经过长时间上机训练就可获得满足加工要求的合理参数, 极大地提升了加工效率和质量。通过智能喷涂工艺参数 库, 建立喷枪行程、雾化点结构、速度适配等工艺参数 之间的关联关系, 后续喷涂加工过程中, 能够在已有喷 涂加工工艺参数库中查看是否有现成的满足条件的喷涂 加工工艺参数数据作为参考, 从而降低喷涂材料的损耗,提高喷涂质量和材料使用率。图 3 所示为智能喷涂工艺 参数库设计流程图。
1.4 智能生产线的柔性化设计
基于现代制造业发展追求逐渐偏向品种多样、小批 量生产、用户定制、响应市场变化等因素[5] 均符合柔性 生产线的特点, 柔性生产线的设计理论也逐渐成为国内 外学者的研究对象。张杰[4]从柔性生产线的产生, 进入 中国的发展及其在制造行业的应用, 浅议柔性生产。刘 冠麟提出公理化行为设计理论, 寻求在柔性生产线的设 计上以整体角度考虑新的方法[8]。虽然柔性化生产的概 念已经被引入, 但是在很多领域中并没有和实际生产结 合在一起。因此需要将柔性化生产引入喷涂生产线中,提高生产线的智能化程度, 快速完成对生产线的设计, 实现不同种类的家具在短周期内完成生产线的规划。研 究智能生产线的柔性化设计主要包括:
( 1) 在设计生产线时使用计算机进行仿真模拟, 为 前期生产得出相应的参数, 进行对应的生产规划, 有效 节省不同产品的生产参数调整时间。同时针对加工工件 不同类型的喷涂程序, 采用相应的喷涂程序预先编辑, 减少在生产过程中不必要的过渡时间。实现在一条生产 线上对不同规格的建材家具进行喷涂加工, 生产出不同 的新产品。
( 2) 生产线的柔性是指生产线系统自身的柔性, 对 于生产线布局之间的干涉拥有自检功能。面对产量大且 规格种类多的家具类产品, 将工业机器人与喷涂工艺相 结合设计一条机器人喷塑柔性生产线, 并生成合理的喷 塑路径, 可有效提高涂料的使用率和生产效率, 所加工 生产的产品质量更有保障。
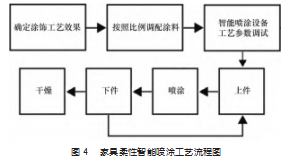
( 3) 针对产品个性化定制的需求, 由智能生产单元 和柔性控制系统组成的柔性智能生产线, 使生产过程灵 活、高效、计划精准、生产透明、事后可追溯且将来可 优化, 实现了高效、高质、低成本的智能化生产。柔性生产控制系统如图 4 所示, 集成了加工系统、物流储运 系统、在线质量检测和智能管控系统, 通过数据接口与 其他系统进行数据交换, 进而实现生产全流程状态的综 合分析、对比计算与自主决策, 从而达到智能柔性生产 线的最优化控制、运行和实时调度。
1.5 智能生产线的数字化设计
在涂装生产线数字中心设计建模时, 依据设计要求, 分析产品各元素间的工程关系与几何关系, 设计驱动参 数、从动参数与常量, 为图形元素或形体特征元素建立 几何约束与工程约束, 使各元素间产生关联, 并通过配 置各种属性信息, 得到参数化全息模型。修改产品设计 或进行系列化设计时, 只需调整相关驱动参数的附值, 即更新产品模型, 这就为大规模个性化定制中, 家具产 品因客户个性化需求, 而出现的变形、重用、延伸、重 组提供了可行性的解决途径。在喷漆过程中, 喷头移动 的速度、喷漆的流量、喷漆的浓度、喷头到喷面的距离 和喷头的角度均会对喷漆涂层的厚度和密度产生影响。 通过建立相应数学模型, 可得到最优的喷涂效果。图 5 所示为涂装生产线数字中心。
1.6 智能生产线喷涂过程实时感知系统
实时感知系统主要通过 5G 远程传输与数据可视化 系统由生产线的运行状态参数感知节点、边缘服务器、 网络传输子系统、后端管理子系统组成。感知节点由多 源传感器和数据采集控制器组成, 如图 6 所示。网络传 输采用基于 5G无线通信的方式, 感知节点完成现场的数据采集和压缩感知预处理, 然后通过 5G 通信设备将压 缩后的数据上传到云平台, 另一方面将数据传输到边缘 节点服务器, 完成运行状态的实时分析与预测。远程 用户通过访问云平台获取现场的实时数据并进行可视 化分析。
实时感知系统在机器人智能生产线喷涂过程中是一 种必不可少的关键性技术, 在智能生产线中引入实时感 知的监测系统, 采集不同喷涂缺陷的图片进行分析, 如 斑点、划痕、积粉等喷涂过程中容易产生的缺陷, 通过 机器视觉算法进行分析, 最终检测出喷涂存在缺陷的地 方并做出对应的举措, 使喷涂过程顺利完成。同时可以 实时感知到喷涂过程的进行和完成度, 可以方便对产品 完成时间进行预测, 如图 7 所示。
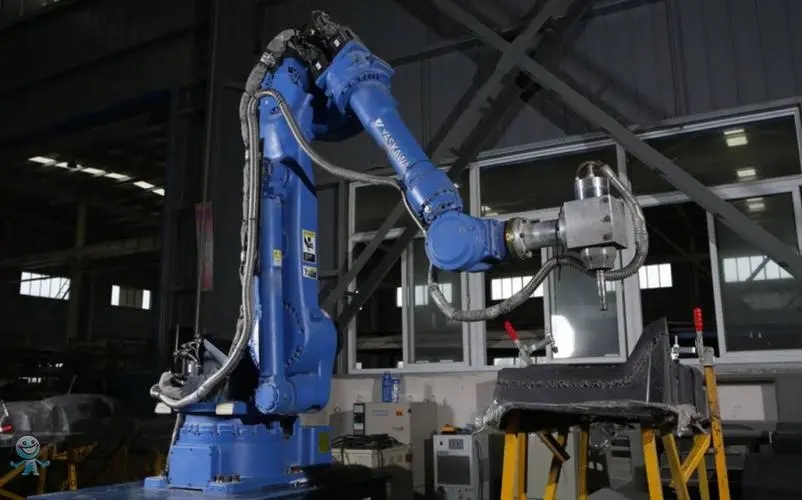
2 家具机器人智能喷涂生产线
家具机器人智能喷涂生产线重点研究柔性轻量化的 智能喷涂产线成套装备, 优化绿色环保涂装工艺, 配套 可视化人机交互系统、智能远程运维系统、对接企业 ERP 并预留生产过程执行系统 (MES) 接口、通过人工 智能技术与工业互联网技术的关键技术分析与研究。实现 机器人可对喷涂工件进行三维扫描,通过特定算法,对机 器人喷涂的行程进行规划,提高喷涂材料均匀性和产品质 量, 减少生产时间和材料损耗降低成本; 可针对个性化、 多种类的家具进行柔性化定制;通过结合数字化、模块化 设计, 可以快速完成对生产线的设计, 实现不同种类的 家具在短周期内完成生产计划; 机器人智能喷涂生产线 具有实时感知能力, 可以检测生产过程中的各个参数, 并利用 5G 技术的低延迟性将数据上传智能远程运维系 统, 对这些参数进行实时处理, 保证喷涂质量的稳定性。
2.1 家具机器人智能喷涂生产线的结构组成
机器人智能喷涂的研究除了机器人的机械结构的设 计, 还包括了三维工件模型扫描[9.10] 和喷涂轨迹规划。国 内学者在机器人喷涂轨迹规划方面做了大量研究, 并取 得了一些阶段性的研究成果。比如: Asakawa 等人[11] 提 出了一种基于工件 CAD 模型自动生成喷涂路径并自动完 成机器人喷涂轨迹编程的系统, 保证涂层质量的同时大 幅度提升了编程效率。 Chen 等人[12] 提出了一种机器人多 段运动轨迹组合的方法, 一定程度上减少了涂料的浪费并缩短了工作周期。张川[13] 建立了漆膜生长速率模型, 对曲面分片后进行轨迹规划并组合得到最优路径。叶 超[14]设计了一种基于视觉传感器 Kinect2 的喷涂机器人定 位系统, 为解决各类型工件的定位问题提供依据。叶 潇[15]利用激光三维扫描技术对机器人喷涂轨迹进行规划 设计, 借助激光扫描仪完成对待喷涂工件的重建, 结合 点云切片技术对工件表面的路径信息进行了求解。刘伟 良[16] 提出了自动轨迹规划和人工示教编程相结合的离线 编程技术, 为解决批量小、种类多的复杂曲面的喷涂轨 迹规划提供思路。为了满足客户需求, 提高企业产品核 心技术竞争优势, 借鉴以上成功案例进行深入研究分析, 结合原有喷漆产线装备结构技术存在的问题, 研发出一 款结构紧凑合理, 占地空间少, 节能环保, 可缩短工艺 流程, 加快喷涂速度, 提高生产效率家具机器人智能喷 涂生产线。该生产线的结构是根据生产线的关键技术所 研制出不同功能的多个单元模块化生产线设备而组成。 主要分为“数据处理系统、智能管理系统、传输线路、 生产线主体”四大类别组成。其中包括: 三维扫描系统、 图像处理系统工艺参数库、 MES 系统、网络管理平台、 云平台、喷涂机器人、传感器、生产线各模块 (含: 往 覆智能喷漆机、自动喷漆设备、平面涂装设备、多轴喷 头装置、喷头运动控制装置、干燥设备、自动化连线设 备、摆动/回转/平移复合运动机构、驱动控制器等)、物 料传输机构、 5G 专线、普通网线、电路设施等。
2.2 生产线的实践效果分析
智能喷涂机器人生产线主要应用在办公台面、办公 台侧板、套房家具床头架、弧形柜板、展示柜台面等较 为复杂的木制品绿色建材加工喷漆生产线设备领域。生产线的技术实践效果如下:
( 1) 采用三维扫描系统通过输送线上的检测工件位 置的光电传感器、上位机分别与执行机构的工控机、 PLC 控制器、上料单元、下料单元、喷涂机器人、激光 器、摄像机、光电传感器电控连接。设计了在线三维扫 描、拍摄、提取深度图特征轮廓图像数据以及进行图像 数据处理系统模型, 自动生成机器人喷涂路径, 再根据 喷涂路径控制喷涂机器人同时又解决了机械定位和光幕 定位无法对工件形状进行有效扫描的问题, 提高扫描精 准度, 实用性强。实现精准轨迹喷涂降低喷涂材料的损 耗, 提高喷涂质量和材料使用率。
( 2 ) 基于点云的图像处理及不同关键轮廓的喷涂轨 迹生成技术和提取技术的研究。也是数控喷涂动态自主 感知配置生产线及机器人喷涂控制策略研究。实现快速 喷涂运动以及快速涂装切换, 改善了涂料利用率, 提高 了建材生产线的生产效率和产品质量合格率。即结合 3D 视觉识别与图像处理, 利用人工智能 (AI) 规划喷涂 轨迹, 解决复杂工件喷涂。
( 3) 通过 5G 专线链路与互联网混合的智能组网模 式, 融合生产信息化管理系统 (MES), 采用面向服务的 整体架构设计的集成系统。实现生产线各部分间的数据 联动, 高效协同。可将设备工况信息和生产数据上传云 端, 帮助生产线实现智慧调度、实时采集、实时感知, 喷涂件测量、喷涂生产线故障检测与控制机器人喷涂、 漆料回收、漆雾处理、设备清洗等智能化实时控制。建 立互联网+智能化数字化定制家具自动喷涂生产线控制 系统, 实现人、设备、物料、产品间的信息互通和生产 过程逆向追溯。并可远程操控生产线改造, 组建生产线
内部私有云平台, 将关键生产系统部署于私有云上, 将 非关键生产线应用部署于公有云, 重要数据专线传输, 非敏感数据应用互联网传输, 保证数据安全, 简化生产 线 IT 运维。达到了网络管理人员通过集中管理平台对生 产线设备、网络功能、业务流量和安全态势进行统一可 视化便捷高效的网络管理效果。
( 4) 采用一种带喷涂机械手的转动架装置结构及往 复式喷涂机械设备的工艺与结构设计的技术, 提高各个 构件之间的连接紧凑性, 简化整体结构, 减小占地空间。 实现精准的定位、自动智能喷涂。缩短了工艺流程, 加 快喷涂速度, 提高了生产效率。
( 5) 采用一种具有跟随工件移动的喷涂设备控制技 术, 建立喷枪行程及雾化点结构参数、喷漆房大小的规 划及喷漆房内进排风流量、速度的适配、过喷漆回落到 输送带上的回收技术等工艺参数之间的关联关系, 构建 底漆和面漆工序的控制模型, 实现一次针对工件的四个 边和工件上面进行均匀喷涂, 达到无死角均匀喷涂, 减 少喷房内二次污染; 改善和提高加工产品高光面漆和修 色的喷涂效果, 提高产品优质成品率。
3 结束语
本文从“运输模块、机器视觉模块、喷涂机器人模 块、往复机模块、油漆回收模块”五大模块和“输送速 度、漆雾状况、油漆回收、节能指数”四个指标进行差 异化划分, 研发出一款家具智能涂装一体化设备的智能 机器人喷涂生产线。可提高设备对板式工件生产效率、 异形面产品喷涂质量的精度、油漆材料利用率及回收量、 降低制造生产污染、设备故障检测及处理等技术能效, 实现了绿色环保智能制造, 集“四级控制、无缝对接、 定义配方、中央供漆、应急处理、远程运维、云数据库、 终身升级”于一体, 具有智能化、自动化、光幕检测、 交错式往复自动喷漆功能。该生产线与原有喷涂装备对 比具有以下特点。
( 1) 具有工件涂装的三维扫描系统, 可建立图形数 据系统模型、提取轮廓图形数据和深度特征数据, 自动 生成机器人喷涂路径, 降低了喷涂材料的损耗, 提高了 喷涂质量和材料使用率。
( 2) 采用数字化设计、模块化快速重构定制智能喷 涂生产线, 可快速实现小批量多品种建材及家具的柔性 喷涂。
( 3) 具有机器人喷涂数字化装备、喷涂过程实时感 知功能, 实现数字化喷涂控制和输送带上的过喷漆回收, 建立喷枪行程、雾化点结构、速度适配等工艺参数库, 构建底漆和面漆工序的智能控制模型。通过 5G 及互联网 技术将设备工况信息和生产数据上传云端, 实现喷涂件测量、喷涂生产线故障检测与控制机器人喷涂、漆料回 收等智能化控制。
参考文献:
[1] Xuan Sun, Yan Zhang, Chenglong Tang, et al. Development of the Field of Wheat Plant Protection Precision Spraying Robot Control System[J], 2016. 4278:427-432.
[2] 刘远红 . 中国工业机器人市场调查[J]. 机器人技术与应用 , 2005(2):24-26.
[3] 白民, 刘远江 . 从 2004 中国国际机器人展览看中国机器人产 业的现状和未来[J]. 机器人技术与应用, 2005(1):20-24.
[4] 张印超, 高义, 王国英 . 试析我国多品种小批量制造企业的问 题与对策[J]. 经济视野, 2013(21).
[5] 刘冠麟 . 柔性生产线的设计理论研究与应用[D]. 长春:吉林大 学, 2014.
[6] Tanaka, K, et al. Module Structured Production System[M] Manu⁃ facturing Systems and Technol ogies for the New Frontier. Spring⁃ er London, 2008:303-308
[7] Tanaka, K., et al. A Study of the Dispatching Order System to Support Module Structured Production System for the Demand Synchronized Production [J]. Journal of Advanced Mechanical Design Systems and Manufacturing, 2010. 4(2):504-515
[8] 孙杰 . 浅议柔性生产线的产生与应用[J]. 科技资讯, 2010(35):33.
[9] 梁猛,方强 . 等腰三角形结构光编码的面形测量误差分析[J]. 光学学报, 2000. 20(11):1518- 1523.
[10] 郝福龙 . 木材喷涂行业的工件三维点云数据检测系统研究 [D]. 广州:广东工业大学, 2018.
[11] Asakawa N, Naoki Y. Teachingless spray-painting of sculp ⁃ tured surface by an industrial robot[J]. Proceedings-IEEE Con⁃ ference on Robotics and Automation, 1997. 3:1875- 1879.
[12] Chen H P, Xi N. Automated robot tool trajectory connection for spray forming process[J]. Jo urnal of Manufacturing Science and Engineering, Transactions of the ASME, 2012.134(2):021017.
[13] 张川 . 复杂曲面机器人喷漆轨迹自动规划与优化方法研究 [D]. 哈尔滨:哈尔滨工业大学, 2018.
[14] 叶超 . 基于立体视觉的自动喷漆机器人工件定位系统设计 [D]. 哈尔滨:哈尔滨工业大学,2017.
[15] 叶潇 . 激光三维建模及喷漆轨迹规划[D]. 哈尔滨:哈尔滨工业 大学,2018.
[16] 刘伟良 . 面向复杂自由曲面的机器人喷涂轨迹规划[D]. 哈尔 滨:哈尔滨工业大学,2018.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/57256.html