SCI论文(www.lunwensci.com)
摘要: 为了研究重载物流系统的水平, 减轻工作人员劳动强度, 提高生产率, 以载重 80 t 的重载移动机器人为研究对象, 对重载 移动机器人整机进行了轻量化设计, 利用有限元焊接仿真软件对车架纵梁进行不同焊接顺序的仿真模拟, 通过对比仿真模拟结果 可以发现, 焊接顺序对焊接温度场、焊接变形、残余应力有一定的影响。采用双轮差速的设计方法对重载舵轮进行设计, 实验结 果表明: 该设计方法减少了两轮转向时的磨损, 增加了耐磨度。基于 5G 通讯技术并建立中国AGV 行业 5G 通讯标准, 使重载移动 机器人实现多智能体协同感知更加顺畅, 建立语义 SLAM 算法, 实验表明: 该算法为重载移动机器人提供环境的结构信息和自身 的位置信息, 实现重载移动机器人的户外运行。重载移动机器人创新设计对研究重载移动机器人有着重要的意义。
关键词:重载,移动机器人,舵轮,SLAM
Innovative Design of Heavy Load Automated Guided Vehicle for Complex Environments Based on 5G Technology
Xu Bin, Chen You
(Guangdong Jaten Robot Automation, FoShan, Guangdong 528313. China)
Abstract: In order to study the level of the heavy-duty logistics system, reduce the labor intensity of the staff, and improve the productivity, taking the heavy-duty mobile robot with a load of 80 t as the research object, the lightweight design of the heavy-duty mobile robot was carried out, and the finite element welding simulation software was used . Simulations of different welding sequences were carried out on the longitudinal beams of the frame. By comparing the simulation results, it can be found that the welding sequence has a certain influence on the welding temperature field, welding deformation and residual stress. The heavy-duty steering wheel was designed by the design method of two- wheel differential speed. The experimental results show that the design method reduces the wear of the two-wheel steering and increases the wear resistance. Based on 5G communication technology and the establishment of 5G communication standards in China′s AGV industry, the multi-agent collaborative perception of heavy-duty mobile robots was smoother, and a semantic SLAM algorithm was established, outdoor operation of heavy-duty mobile robot was realized . The innovative design of heavy-duty mobile robots is of great significance to the study of heavy-duty mobile robots.
Key words: heavy load; automated guided vehicle; steering wheel; SLAM
0 引言
随着经济全球化的发展和港口自由贸易的发展, 航 空航天、高铁建设、港口、机场、核工业、船舶、大型 涡轮机、港口集装箱运输业等行业已经进入了快速发展 时期[1-6]。原有的拖挂车作业已经满足不了当前各行各业 的需求, 因此, 重载移动机器人 (Automated Guided Ve⁃ hicle) 应运而生, 它是一种装有自动导引系统的搬运设 备, 与传统重载搬运设备相比, 具有安全性高、定位精 确、工作效率高等优点。
在此背景下, 许多国家和高校认识到重载 AGV 的强 大作用, 国内外投入了大量的人力物力来进行研究和应用, 中国高校的学者对国内外的重载运输车、牵引车进行了深 入的研究, 也研究出了电动、混合动力的驱动系统 [7- 15]。
但是, 在面对如上所述质量较大的中大型工件以及 港口集装箱重载搬运需求时, 国内传统搬运机器人无法 满足要求, 而选用国外机器人则成本较高。
目前市场的 20 t 及以上重载移动机器人售价均超百 万元, 且大多数产品采用“单舵轮”设计, 轮子磨损速 度快、维护成本高; 在移动机器人向重型和超重型 (承 载能力 100 t 以上) 发展时, 国内尚无法提供高转矩、低 底盘、全转向的驱动轮单元。
因此, 研制可承受重载荷, 运行迅速、稳定可靠的 移动机器人迫在眉睫。
本文以载重 80 t 载荷的移动机器人为例, 以差速结 构设计方法设计 20 t 重载移动机器人舵轮, 通过仿真计 算对整机架构的轻量化设计、研发多智能体协同感知系统, 实现对多种类型和多台智能体同时进行协同导航、 协同定位、路径规划和任务处理。建立中国移动机器人 行业 5G 通讯标准, 处理重载移动机器人运行过程中的海 量数据。开发语义 SLAM 算法, 为重载移动机器人提供 环境的结构信息和自身的位置信息。该重载移动机器人 的创新研发, 突破行业痛点、攻克“卡脖子”技术, 有 利于为国产机器人行业建立技术自信, 助力打破全球工 业机器人市场的垄断格局。
1 设计原理及结构设计
1.1 重载移动机器人整机设计
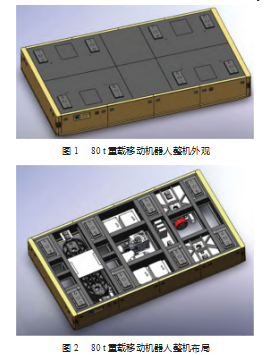
载重 80 t 移动机器人的总体尺寸: 7 160 mm (长) × 4 006 mm (宽) ×1 060 mm (高); 实现的功能为整个过 程中移动机器人的运动方式为前进、后退、横移、原地 转圈。
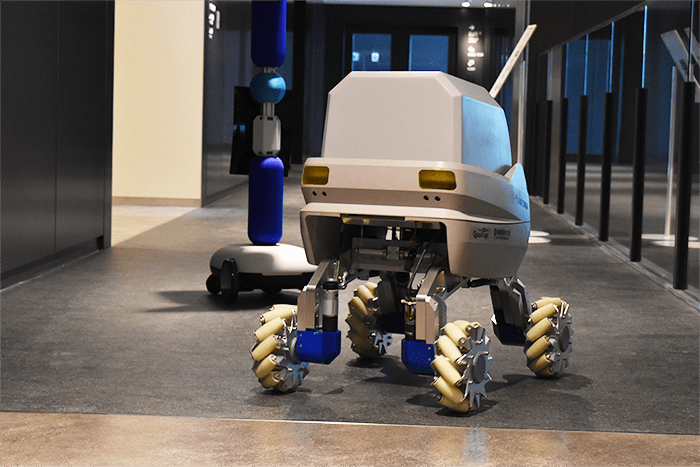
移动机器人采用“4 组差速轮”的布置形式, 如图 1 ~ 2 所 示 。 整 个 系 统 为 差 速 轮 配 备 一 个 车 载 控 制 器 ( VCU), 通过 VCU 接收指令控制 4 组差速轮运动。 VCU 集成多差速轮控制协同算法, 能够将 PLC 控制器发出的 差速轮的移动速度 v、转向角度 θ指令进行求解运算, 得 到各个差速轮的位姿状态, 控制差速轮及辅助轮按照设 定速度和角度运行, 并将数据返回于 PLC 控制器中。
1.2 重载移动机器人舵轮设计
目前市场的 20 t 及以上重载移动机器人售价均超百 万元, 且大多数产品采用“舵轮”设计, 轮子磨损速度 快、维护成本高; 在移动机器人全向重型和超重型 (承载能力 80 t 以上) 发展时, 国内尚无法提供高转矩、低 底盘、全转向的驱动轮单元。
本文自主研发对称式 20 t 重载舵轮, 实现了驱动单 元的 360°旋转, 并以差速设计实现了驱动轮的高耐磨和 长寿命。如图 3 所示。
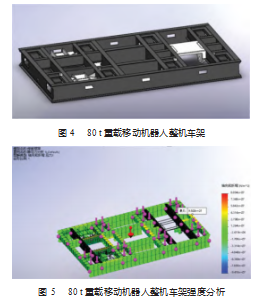
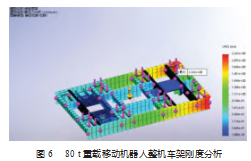
1.3 重载移动机器人整机轻量化结构设计及仿真
对载重量为 80 t 的重载移动机器人车架进行焊接工 艺的仿真模拟、有限元分析、尺寸优化以及拓扑优化。 首先, 利用 Simufact.welding 焊接仿真软件对车架纵梁进 行不同焊接顺序的仿真模拟, 如图 4 所示, 通过对比仿 真模拟结果可以发现, 焊接顺序对焊接温度场、焊接变 形、残余应力有一定的影响; 然后利用 Hypermesh 有限 元分析软件对车架进行有限元分析, 如图 5 ~ 6 所示。其 中包括有限元的建模过程: 几何清理、中面抽取、网格 划分及单元质量检查、材料属性以及连接工艺的添加, 并根据车架实际受力情况, 对其进行载荷边界条件的确 定以及工况的选取, 接着对车架进行了有限元分析, 根据分析结果可知, 该车架满足强度及刚度要求并具有轻 量化空间; 同时, 该车架可以有效地避免共振。
2 行走控制系统设计
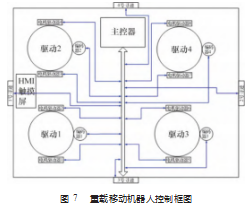
整车有 4 个差速驱动单元, 每个驱动单元 2 个电机, 共计 8 个电机, 分别用 8 个 CAN 控制接口的电机驱动器 驱动。每个驱动单元, 安装有 CAN 通信口的角度编码 器, 用于检测驱动单元的转向角度, 共计 4 个角度编码 器。在重载移动机器人车身的前、后、左、右安装有 CAN 通信接口的寻迹传感器。
重载移动机器人主控器器, 根据 AGV 要做的行走动 作, 计算出各个驱动器的目标转角, 以及驱动器的行走 速度, 从而计算出各个电机的运转速度以及电机的运转 方向, 通过 CAN 总线, 发送相应指令给驱动器。重载移 动机器人主控器, 还会根据各个驱动器的角度编码器反 馈过来的数据, 计算驱动的角度, 如果跟“目标转角” 有偏差, 就会调整相应驱动单元上的左、右驱动器的速 度, 通过差速调整驱动单元的角度, 如图 7 所示。
各个驱动单元的电机速度, 都需要精确计算的, 特 别是重载移动机器人在转向的时候 (在用手操器操作转 向, 或者重载移动机器人在进行磁寻迹引导, 需要转向 的时候), 各个驱动单元的转角是不同的, 每个电机的行 走速度也是不同的, 需要精确计算。
由于是让差速驱动单元, 实现“舵轮的功能”, 即不 但能够提供行走动力, 还需要控制其转向角度。
驱动单元的角度, 是靠“驱动单元上左、右电机的 速度差”实现转向的, 安装有角度编码器, 用于检测角 度。重载移动机器人控制器, 会根据重载移动机器人行 驶的动作要求, 计算出, 各个驱动单元的“目标转角” 的。而重载移动机器人可能在行驶的过程中, 驱动单元 是可能会由于各种原因, 转向角度会出现偏差的, 这个 时候就需要主控器调整驱动器左、右电机的速度, 让驱 动单元重新回到“目标转角”。也就是说, 重载移动机器 人主控器需要实现“驱动单元的角度闭环”, 为了描述方 便, 称之为驱动单元的转角跟随功能。
驱动转角的约定: 驱动单元中轴跟车身中轴方向平 行, 此时驱动转角为 0°; 右侧, 驱动转角为 0°~ - 135°; 左侧, 驱动的转角为 0°~135°。顺时针的时候, 驱动的转 角值变小。
驱动单元的转角跟随, 分为“静态跟随”以及“动 态跟随”。当重载移动机器人整车还处于行驶状态, 驱动 单元的当前转角偏离目标转角的时候, 是采用“动态跟 随”, 即驱动单元的左右电机相对车身的运转方向一致 (即跟车身运动的方向力一致), 通过左、右电机的速度 差, 实现驱动单元的转角改变; 当重载移动机器人整车 是处于停止状态时,由于驱动单元的目标转角改变,而需 要跟随的时候, 会采用“静态跟随”, 即驱动单元的左、 右电机相对车身的运转方向相反,从而让驱动单元以“原 地旋转”的方式, 改变驱动单元的转角。为了描述方便, 约定重载移动机器人向 HMI 屏幕运行发得方向为正方 向, 反之为反方向。当电机运转的方向, 跟重载移动机 器人正方向一致, 那么此时电机正转; 反之, 电机反转。
3 软件设计
3.1 多个重载移动机器人协同感知系统设计
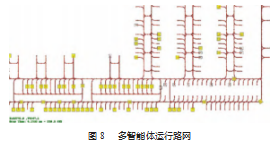
多个重载移动机器人协同控制系统是一个能实现对 多种类型和多台重载移动机器人同时进行协同导航、协 同定位、路径规划和任务处理的控制系统, 它是控制机 器人执行任务的核心控制软件。多重载移动机器人协同 控制系统可以通过接收客户系统、呼叫盒、呼叫客户端 和点料系统等命令源发来的移动机器人任务指令, 经过 任务分解、任务分配、移动机器人位置信息共享、协同 定位等环节, 最终通过控制移动机器人执行一连串连续 的操作以完成相应的任务。为了保障安全, 目前移动机 器人运行在提前设置好的路网上, 如图 8 所示, 白色小 框表示一台重载移动机器人, 黄色小方块表示任务站点, 红色线条是表示重载移动机器人运行的路径。每个重载 移动机器人实时通过 5G 网络与云端系统以及其他重载移 动机器人进行信息共享。目前该系统可实现 50 台重载移 动机器人协同完成任务, 同时实现了多台重载移动机器 人和多台叉车混合协同工作。
3.2 重载移动机器人语义 SLAM算法
定位导航系统是重载移动机器人系统的重要组成部 分, 即时定位与地图构建 (Simultaneous Localization and Mapping, SLAM) 技术可以为重载移动机器人提供环境 的结构信息和自身的位置信息。自身的位置信息通过局 部环境信息与全局地图的比对而获得, SLAM 技术从几 何层面帮助机器人感知环境, SLAM 算法解决重载移动 机器人定位导航的问题。语义 SLAM 技术使得机器人不 仅获得环境的结构信息, 同时可以识别环境中独立的个 体, 获取个体的位姿、物理属性、功能属性等语义信 息, 即在地图中识别出相应的物体, 并打标签, 用于 定位匹配。
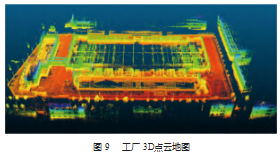
重载移动机器人系统中的语义 SLAM 部分, 目前的 方案是由 3D点云地图构建和目标分割组成。 3D 点云地 图构建的数据只要来源于多线激光雷达和惯性测量单元 (Inertial Measurement Unit, IMU), 多线激光雷达提供大 量的环境点云信息, IMU 提供线加速和角速度。提取多 线激光雷达的里程计因子、 GPS 因子、 IMU 的预计分因 子和回环因子, 采用因子图优化的方法得到机器人的全 局一致的位姿, 从而构建整个地图。重载移动机器人所 运行的工厂 3D点云地图如图 9 所示。
4 重载移动机器人信息传输低延时技术
重载移动机器人根据 VLSAM 远程计算和调度协同的 需求, 本文采用最新的 5G 技术来支撑。
( 1) 高速率要求
由于 VLSAM 传感器获取的视频信息要传输到云计算 中心, 进行多角度视频和多车视频的融合处理, 因此每 台 AGV 应具备较高带宽的传输能力。以每个摄像头提供1 080 p/30 fps 的 h265 编码方案, 需要 4 Mb/s 的带宽。目 前 5G 理论传输速率在 1 Gb/s, 当前我们所采用的嘉腾 5G 智能网关可以提供最高 500 Mb/s 的下行速率和 200 Mb/s 的上行速率, 单 AGV 理论上可以支持多达 50 个摄像头进 行视频数据采集和上传。
( 2) 低延迟要求
由于 AGV 运动过程中需要实时根据 VSLAM 的定位 信息和障碍物状态进行运动控制, 故延迟要求较高。 5G 理论延迟在 1 ms 内, 但目前商用环境 5G 公网只能提供 大约 40 ms 的延迟水平, 专网环境可以提供 10 ms 以内的 保障。
( 3) 超高移动性要求
5G 是移动通讯技术, 理论上在时速 500 km 的场景 下都可以运行。但由于要保证较大的带宽和低时延, 在 目前的商用环境中, 测试过实际在 100 km/h 下, 还能保 持 200 M 的上下行速率和 40 ms 延迟。基本可以满足重载 AGV 的运行需要。
( 4) 海量接入要求
5G 技术的理论接入能力是 100 万个/km2. 虽然重载 移动机器人在单位面积内不可能有这么大量的接入, 但 考虑到同一区域内可能存在较多的其他无线设备接入, 还是在一定程度上对大接入有要求。
嘉腾机器人公司针对重载移动机器人的 5G 通讯技 术, 在北京大学的牵头下, 首次在中国 AGV 行业建立 5G 通讯标准, 如图 10 所示。
5 重载舵轮实验及结果分析
为了实验 20 t 差速舵轮的承载能力和运行可靠性, 搭 建了一个实验平台。实验平台为三点支撑结构, 20 t 差速 舵轮在前面的中间位置, 后面采用两个固定轮辅助支撑。在实验平台上放置总质量为 30 t 的负载钢板和金 属块, 如图 11 ~ 12 所示。实验平台的负载运行速度为 36 m/min, 两种路况进行实验, 水泥平地和 10°的斜坡, 时间周期为 7 天。
对称式舵轮重载移动机器人舵轮试机结果: (1) 重 载移动机器人单组舵轮承载能力 20 t, 运行速度 0.6 m/s, 定位精度小于或等于 20 mm; ( 2) 重载移动机器人采用 4 组轮组, 可以满足承载 80 t 的目标要求。
实验结果表明产品突破行业痛点、攻克“卡脖子” 技术, 国产机器人更加贴近国内市场, 具备开发成本低、 响应速度快等先天优势, 在性能功能上实现差异化, 激 发增量市场, 将成为国产品牌差异化竞争的关键。
6 结束语
以载重 80 t 的重载移动机器人作为研究对象, 通过 对整机结构、舵轮、控制、导航等创新设计, 得出如下 结论。
( 1) 通过差速结构的设计方法, 设计了 20 t 重载舵 轮, 结果显示: 该方法减少两轮在转向时对地面的磨损, 延长其使用寿命。搭建 30 t 重载实验平台, 实验结果显 示, 20 t 重载舵轮达到了载荷要求, 而且定位精度小于 20 mm。产品突破行业痛点、攻克“卡脖子”技术, 有 利于为国产机器人行业建立技术自信, 助力打破全球工 业机器人市场的垄断格局。
( 2) 整机采用 4 组差速轮的形式布置, 实现重载移 动机器人的运动方式为前进、后退、横移、原地转圈。 通过建立机架的三维模型, 并对该模型进行有限元等软 件进行分析, 仿真结果显示整机机架焊接顺序对焊接温 度场、焊接变形、残余应力有一定的影响。
( 3) 首次在 AGV 行业建立中国 AGV 行业 5G 通讯标 准, 实现重载移动机器人低延时, 以及海量数据的处理。
( 4) 语义 SLAM 对 重 载 移 动 机 器 人 室 外 运 行 提 供 保障。基于 5G 技术面向复杂环境的重载移动机器人, 推进了我国独立知识产权的智慧重载、高效、节能搬运机 器人装备产业化, 推动我国智慧重载移动机器人发展和 应用。
参考文献:
[1] 马文涛 . 增程式电动码头牵引车动力传动系统控制策略研究 [D]. 镇江:江苏大学,2017.
[2] 陈超 . 重型运输车分布式混合动力驱动系统设计研究[D]. 北 京:中国矿业大学,2019.
[3] Meng Fanzhao, Wei Daifeng. Design of the AGV Trolley for Transporting the Drip Irrigation Belt Roll[J]. Journal of Physics: Conference Series,2021(1):12- 19.
[4] 卢敬铭 . 重载仓储自动引导车底盘的设计实现[D]. 广州:华南 理工大学,2017.
[5] 刘静 . 自装卸集装箱拖车起重装置设计研究[J]. 青岛:青岛理 工大学,2017.
[6] 高宇 . 混合动力码头牵引车控制策略与参数匹配研究[D]. 长 春:吉林大学,2008.
[7] 黄辉阳 . 基于轻量化的 6×4 牵引车车架结构设计分析[D]. 长 沙:湖南大学,2019.
[8] ANDERSON, MICHAEL. The Modern AGV Delivers Flexibility: Automatically guided vehicles are getting smarter and more ver⁃ satile [J]. Automotive Design Production,2019(1):42-43.
[9] 宋凯 . 移动机器人主动车轮设计与仿真[D]. 北京:北京理工大 学,2015.
[10] 张瑞军 . 新型电动轮的结构设计与性能分析[D]. 镇江:江苏 大学,2016.
[11] Ning M,Chenhao Z,Stephen Aloisius.Simulation model and per⁃ formance evaluation ofbattery-powered AGV systems in auto ⁃ mated container terminals[J]. Simulation Modelling Practice and Theory,2021:106- 108.
[12] 彭天然 . 物料搬运移动机器人机械与控制系统设计与研究 [D]. 安徽:合肥工业大学,2016.
[13] 路春雷 . 未知环境下麦克纳姆轮机器人路径规划及其目标 检测定位[D]. 辽宁:大连海事大学,2020.
[14] 王冠 . 全方位移动平台运动控制技术研究[D]. 北京:北京理工 大学,2015.
[15] 谭柱 . 全向移动机器人控制系统的研究[D]. 深圳:深圳大学, 2017.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/57721.html