SCI论文(www.lunwensci.com)
摘要:为了使工业机器人能够满足重载工作的目标要求, 设计了一款全新的重载型机器人末端工具快换装置 。结合机械设计原理, 对快换装置的核心机构的结构参数进行了重新设计, 为了减轻快换装置的整体质量, 装置主体部分采用了分体式的设计, 采用了 质量更轻的 6065 型铝合金材料 。使用三维建模软件 NX12.0 对快换装置进行实体参数化建模, 并基于有限元分析软件 Abaqus 对快 换装置的核心零部件包括锁紧端盖 、锥槽锁芯 、锁紧钢圈进行了相关载荷工况仿真, 并通过仿真云图找出了在极端载荷工况下的 关键受力部位和所受的最大应力, 使其满足材料的强度要求 。加工出实验样机, 通过滚珠丝杆测试滑台施加极限载荷, 发现机器 人快换装置的主要破坏部位与有限元仿真结果一致, 最终确定了机器人快换装置的核心受力部位在锁紧端盖的主体与钢珠槽的连 接处, 验证了有限元仿真结果的准确性, 有效缩短了产品的开发周期, 对提高产品的可靠性发挥重要的促进作用。
Structural Design and Experiment of End-tool Quick Changer for Heavy Duty Robot
Guo Shouyi1. Wu Wenjun1. Wei Kaifu2
( 1.School of Mechanical and Automotive Engineering, Guangxi University of Science and Technology, Liuzhou, Guangxi 545000. China;2. Guangxi Lituo Intelligent Technology Co., Ltd., Liuzhou, Guangxi 545000. China)Abstract: In order to enable industrial robots to meet the requirements of heavy-duty work, a new heavy-duty robot end tool quick changer is designed. According to the principle of mechanical design, the structural parameters of the core mechanism of the quick changer are redesigned. In order to reduce the overall weight of the quick changer, the main part of the device adopts the split design and adopts the lighter6065 aluminum alloy material. Three-dimensional modeling software NX12.0 is used to conduct physical parametric modeling of the quick changer. Based on the finite element analysis software Abaqus, relevant load conditions are simulated for the core components of the quick changer, including the locking end cover, the cone-groove lock core and the locking steel ring. The key stress locations and maximum stresses under extreme load conditions are found out through the simulation cloud image and confirmed to meet the strength requirements of the material. the experimental prototype is processed, and the ultimate load is applied to the ball screw test slide. It is found that the main damage parts of the robot quick changer are consistent with the finite element simulation results . The core stress parts of the robot quick change device turn out to be at the connection between the main body of the lock end cover and the steel ball groove , which verifies the accuracy of the finite element simulation results and effectively shortened the development cycle of the product . It plays an important role in promoting the reliability of products.
Key words: quick changer; machine design; finite element; strength checking
0 引言
在“工业革命 4.0”和“中国制造 2025”的时代背景 下[1], 我国工业制造水平快速发展, 尤其是在汽车以及 重工业制造领域, 随着国内外对于重工业制造的需求的增 加, 一大批重工业装备零件加工厂应运而生, 比如在汽车 的总装车间内, 由机器人来完成冲压、焊装、总装等高负 载的工作, 这就需要用到越来越多的大型重载作业机器 人[2-3] 。为了提高机器人的工作效率, 通常在机械臂末端 安装工具快换装置, 使工业机器人可以更换不同种类的作 业工具, 从而完成不同的作业任务, 实现“一机多能”[4]。
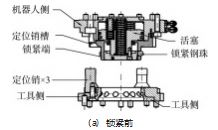
机器人快换装置则是连接机器人手臂与末端工具的关键部 分。如图1所示, 机器人快换装置的机器人侧和工具侧分别 通过安装法兰与机器人手臂和末端工具进行连接。
传统的末端执行器需要采用人工手动更换的方式, 费时费力, 而且工人的作业安全无法得到保障 。机器人 快换装置可以保证在不需要人工参与的情况下, 使机器 人手臂与各种末端执行器相结合, 保证了工人作业安全, 提高工厂的生产效率 。经过调查, 国内对于机器人快换 装置的应用主要是以中低负载类型为主, 负载普遍在 500 kg 以下, 对于重载型快换装置的应用与研究较少。
综合以上分析, 设计了一款重载型快换装置, 负载 达到了 1 000 kg。为了方便工人进行拆装和维护, 降低产 品的后期维修成本, 本案例采用分体式的轻量化设计方案, 主体部分采用了质量更轻, 强度更高的 6065 铝合金材料, 使产品在达到使用要求的条件下整体质量尽可能的降到最 低, 最后通过有限元仿真软件 Abaqus 与加工实验样机校 核的方法来对产品的结构强度进行验证, 观察实验结果与 有限元仿真结果是否一致, 从而保证产品结构的可靠性。
1 快换装置的设计
1.1 技术要求
本文设计的机器人快换装置主要应用于重载型机器 人手臂, 用于装配汽车白车等重载的搬运工作 。快换装 置作为连接机器人手臂与末端工具的介质, 为了能够更 好地满足工作需要, 设计的机器人快换装置需要具有稳 定性强 、主体刚度高 、重量轻和通用性强等特点。
1.2 主体外观
机器人快换装置除了通过机器人侧和工具侧锁紧来 抓取末端工具外, 本身还需要挂载一些外挂模块来进行 命令信号的传输 。现在市场上主流的设计方案主要分为 圆形主体 、矩形主体和多边形主体, 相比于矩形和多边 形的快换装置主体只能搭载有限数量和特定型号的外挂 模块, 而圆形主体则可以根据需要自由确定外挂模块的 数量和功能, 具有更高的使用自由度, 所以本方案的机 器人侧主体和工具侧主体均选用圆形的方案设计。
1.3 锁紧机构
锁紧机构是机器人快换装置的核心机构, 主要包括 凸轮式锁紧 、钢珠球式锁紧 、卡盘式锁紧和插拔式锁紧。 凸轮式锁紧是通过活塞推动凸轮卡入工具侧的钢圈内, 凸轮卡紧后可以起到防故障锁紧的功能 。钢珠球式锁紧 则是通过活塞推动活塞杆顶端的锥槽锁芯, 锥槽锁芯周 围有一圈钢珠, 钢珠随着锥槽锁芯的运动向四周移动, 最终卡入到工具侧内圈的球槽内来进行锁紧 。卡盘式锁 紧方式是通过卡紧盘的旋转完成锁紧 。综合以上锁紧机 构方案来看, 每一种都有其各自的优点, 都能完成预期 的要求 。考虑到钢珠球式锁紧在精度, 耐久性以及稳定性方面都有着较高的可靠度[5], 本文采用市面上应用范 围最广, 最受青睐的钢珠球式锁紧。
1.4 切换机构
快换装置机器人侧和工具侧的锁紧和分开由切换机 构为其提供动力源, 以保证两侧能够快速并稳定地锁紧 与分离 。现有的切换机构传动方式: 液压式传动 、气压 式传动 、电子传动 、电气传动 、机械传动等[6] 。不同传 动方式特性如表 1 所示。
由表 1 可知, 气压传动具有驱动力大, 驱动速度快, 构造简单, 价格便宜和工作寿命长等优势, 当然也存在 一些不足, 比如可能会受到气源不稳定的影响而导致定 位精度降低, 驱动力不如液压传动大 。综合考虑机器人 快换装置所处的工作环境以及工作要求, 选择气压- 弹 簧工作方式作为本重载快换装置的切换机构, 这样既可 以提高锁紧力和提高切换效率, 又可以保证在断气或断电 等突发环境下进行自锁, 保证快换装置工作过程的稳定。
2 快换装置的核心结构设计
2.1 总体机械
快换装置在开始对接时, 机器人侧逐渐靠近工具侧, 通过定位销和定位销槽来确定对接位置, 外界气压通过 进气接头进入机器人侧主体的气缸中, 气缸周围采用星 形密封圈保证气体不会外漏 。活塞则在气压的推动作用 下带动锥槽锁芯向上移动, 此时钢珠收回, 机器人侧与 工具侧对接后, 关闭气压, 活塞在弹簧力的推动作用下 推动锥槽锁芯向下移动, 锥槽锁芯推动周围的钢珠穿过 锁紧端盖上的钢珠孔移动到锁紧钢圈上的球槽内, 通过 钢珠与锁紧钢圈卡死进行锁紧 。再次通入气压, 推动活 塞上移, 钢珠球收回, 此时机器人侧和工具侧可进行分 离 。为了达到轻量化的目标, 在工具侧内侧采用锁紧钢 圈的设计来减轻工具侧的质量 。快换装置的整体机械方 案和对接流程如图 2 所示。
以现有的快换装置产品为基础来设计重载型快换装置, 首先对快换装置的核心机构即锁紧机构与切换机构 进行了重新设计与计算, 确定每个核心零部件的具体特 征, 用三维建模软件 NX12.0 建立快换装置的三维模型, 最后运用有限元分析软件 Abaqus 对快换装置的虚拟样机 进行强度校核, 来检查其强度是否达到要求。
2.2 锁紧机构设计
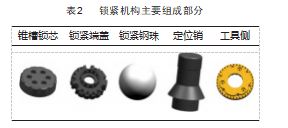
锁紧机构作为快换装置的核心机构之一, 主要包括 锥槽锁芯 、锁紧端盖 、锁紧钢珠 、定位销 、和工具侧, 如表 2 所示。
锥槽锁芯在活塞杆的作用下向工具侧平移, 推动周 围的钢珠球向四周径向运动, 钢珠球移动到工具侧内侧 表面的球槽内, 锥槽锁芯与钢球的接触部分采用防回落 设计[7], 这样当气源突然中断或出现短暂的失效情况时, 可以保证钢珠不会脱离钢珠球槽, 如图 3 所示。
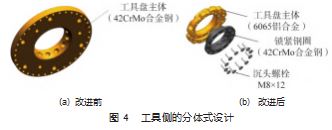
当连接在机器人手臂上的机器人侧运动时, 会在球 槽面的支撑作用下带动与末端工具相连的工具侧运动, 这就要求工具侧内圈具有较高的结构强度 。对于轻载型 快换装置, 机器人侧和工具侧主体体积不算太大, 所以 普遍采用了全合金钢的设计, 这样做的好处是便于装配。 而对于重载型快换装置, 由于机器人侧和工具侧的体积较大, 如果采用全钢的设计, 那么务必会造成快换装置 主体质量过大, 一方面会占用机器人手臂的额定负载, 另一方面会给安装工人在进行安装时带来不便 。所以对 于本文快换装置, 只在工具侧内圈的锁紧钢圈部分采用 42CrMo 高强度合金钢, 其余主体部分采用质量更轻的 6065 铝材[8], 用 12 颗 M8 的沉头螺栓进行连接, 这样既减 轻了质量, 又可以对工具侧稳固的锁紧, 如图 4 所示。
2.3 锁紧力的计算
当快换装置的工具侧与机器人侧结合时, 锥槽锁芯 将钢珠球推到极限位置处, 此时钢珠球与球槽表面形成 刚性接触[9], 建立如图 5 所示的直角坐标系。
图 5 中, FL 为所施加负载; FS 为弹簧所提供的锁紧 力 。在快换装置的正常工作中, 锁紧力由弹簧和气源共 同提供, 但考虑到如果出现断气或者断电的突发情况时, 此时锁紧力须全部由弹簧提供, 而且需要保证在满负载 的情况下, 钢珠不会出现缩回导致机器人侧与工具侧分 开 。F1 为 FL 沿钢珠球与锁紧钢圈接触面法向方向的分 力, F2 '与 F1 在水平方向上的分力大小相等, 方向相反; F3 为 F2 '沿着钢珠球与锥槽锁芯接触面法向方向上的分 力, 也是钢珠球作用于机器人侧的力, FS 与 F3 沿竖直方 向的分力大小相等, 方向相反 。α 为锥槽锁芯切面与水 平方向的夹角, θ 为工具侧切面与竖直方向的夹角 。根据以上各力和角度的关系, 可以得出负载力 FL 和弹簧力 FS 的关系式为:
式中: S 为安全系数, 考虑到铸造零件的可靠性[10- 11], 取 安全系数 S=1.6; 由于负载为 1 000 kg, 所以 FL=9 800 N。
代入式 ( 1 ), 可得所需弹簧的锁紧力 FS=991.5 N。
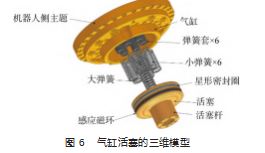
2.4 切换机构设计
切换机构主要包括气缸主体 、弹簧组 、弹簧套 、活 塞, 本文采用弹簧 、气压源协同工作的方式作为快换装 置的切换源, 由锁紧机构的结构设计部分得出快换装置要 承担 1 000 kg 的负载, 所需要的弹簧锁紧力为 991.5 N, 根据所提供的技术要求, 弹簧在锁紧时的压缩量, 大弹 簧为 36 mm, 小弹簧为 32 mm 。对照弹簧选型手册, 最 终选择大弹簧的型号为 C.250.350. 1275.AP、小弹簧的型 号为 C.200.200. 1000.AP 。具体的技术参数如表 3 所示。
此时整个弹簧组提供的弹簧力为:
为了使活塞受力均匀, 6 个小弹簧均匀分布在大弹 簧周围。
2.5 气缸及密封设计
本案例所设计的机器人快换装置在气缸的外观上与 传统气缸保持一致, 采用圆形单杆双作用气缸的设计方 案, 选用标准气缸[12], 缸体内径 D=125 mm, 根据机械设 计手册可得, 活塞杆直径 d/D=0.2~0.5. 取活塞杆直径为 45 mm; 载荷效率 η=0.85; 工作气压 P=0.35 ~ 0.8 MPa。 在快换装置的工作过程中, 由于气缸缸筒要承受气体的 压力, 只有缸体有足够的厚度才能保证在气体压力下不 产生破坏, 这里将气缸厚度的选择按薄壁筒厚度来进行 计算:
式中: δ为气缸桶壁厚, mm; D为气缸筒的内径, mm; Pt 为气缸实验压力, 一般取 Pt=1.5P; [σ]为缸筒材料的许 用应力, MPa, [σ]=σb/S; S 为安全系数, 一般取 S=6~ 10.
本案 例 中 快 换 装 置 缸 体 的 材 料 选 择 为 6061 铝 合金, 强度高 、可使用性好, 抗腐蚀性强, 抗拉强度为205 MPa, 取安全系数 S=10. 则 6061 铝合金的许用应力 为 20.5 MPa 。在实际加工过程中, 为了保证工件的使用 安全, 通常会对缸体壁厚进行加厚处理, 最终确定缸体 的壁厚为 10 mm 。用三维建模软件 NX 12.0 建立气缸体和 活塞的三维模型, 如图 6 所示。
活塞主体外围留有密封槽用于放置橡胶圈, 本案例 采用星型橡胶圈, 用以保证具有良好的密封环境[13- 14]。 为了验证所选方案的可行性, 假设快换装置处于松开状 态下, 此时弹簧的压缩量达到最大, 缸内气压提供的压力为:
式中: D为气缸内径; d 为活塞直径; P 为工作气压; η 为载荷效率。
快换装置的机器人侧和工具侧在分开状态下, 活塞 需要继续向下移动, 移动的距离为 h, 由表 3 的弹簧技术 参数可知, h=n-l= 19 mm 即弹簧组还要继续压缩 19 mm 的行程, 弹簧的压缩量达到最大, 此时的弹簧力为:
FSmax=K1n1+6K2n2=1 602. 17 N<3 172 N即在最小的工作气压 0.35 MPa 下, 气体完全可以推 动活塞。
3 有限元分析与实验校核
锁紧机构作为快换装置的核心机构, 是快换装置锁 紧与正常工作的重要保障, 要求锁紧机构的每一个主要 零部件都要有足够的硬度和强度来保证快换装置的有效 寿命 。为了验证模型的有效性和可行性, 本文运用有限 元分析软件来校核锁紧零部件在受到极限拉力和扭矩情 况下是否会发生强度破坏 。在机器人手臂工作的过程中, 快换装置主要承受拉力和扭矩载荷, 根据技术要求, 快 换装置核心机构要所能承载的极限拉力为 40 kN, 极限 弯矩为 4 500 N ·m, 如图 7 所示。
3.1 有限元模型的构建
锁紧机构零部件主要包括锁紧端盖, 锥槽锁芯和锁 紧钢圈, 所用材料为高强度合金钢 42CrMo, 屈服强度为 950 MPa 。安全系数 S1=2. 由于锁紧零部件属于运动部 件, 需要考虑冲击载荷[15], 取冲击系数 S2=1.2. 所以取 总的安全系数为 S=S1S2=2.4. 许用应力为[σ] =396 MPa。 使 用 Hypermesh 对 零 件 进 行 网 格 画 分[16], 网 格 类 型 为 C3D10 四面体网格, 为了提高计算精度并缩短运算时间, 部件主体部分网格尺寸为 3 mm, 关键接触受力部分网格 尺寸为 1 mm, 具体有限元模型和相关参数如图 8 所示。
3.2 有限元仿真及结果分析
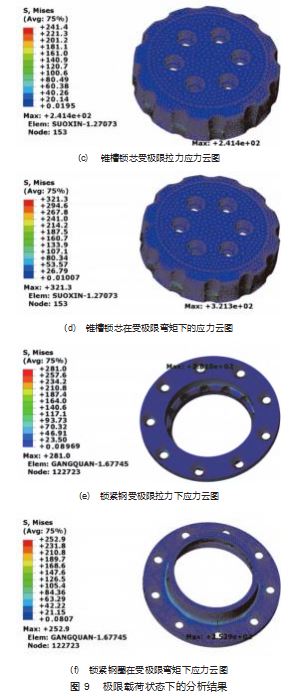
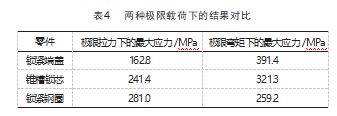
利用有限元分析软件对两种极限载荷工况下的锁紧 端盖 、锥槽锁芯 、锁紧钢圈进行分析, 得出的工件载荷 云图如图 9 所示。
仿真结果如表 4 所示, 可以看出, 在所要求的两种 极限载荷情况下, 锁紧端盖 、锥槽锁芯 、锁紧钢圈的最 大应力分别为 391.4 MPa 、241.4 MPa 、281 MPa, 均小于 许用应力[σ]=396 MPa, 而且在极限弯矩下的最大应力普 遍大于极限拉力下的最大应力, 说明受弯矩力的作用下 工件容易发生破坏 。从图 9 中可以看出, 锁紧端盖的最 大应力出现在端盖主体与球槽的连接处, 最大值达到了 391 MPa, 已十分接近许用应力, 说明此部分为最易受 到破坏的部位, 实际生产中可以做相应的加厚处理; 锥 槽锁芯的最大应力出现在受极限弯矩下与钢珠接触的球槽部分, 最大值为 321 MPa; 而锁紧钢圈的最大应力出 现在受极限拉力下的螺栓连接处, 最大值为 281 MPa。 锁紧机构的核心部件强度均满足要求。
3.3 实验校核
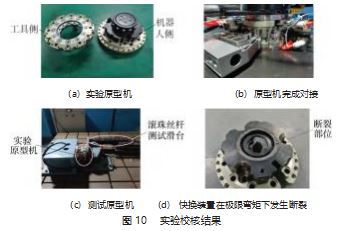
根据以上设计以及仿真分析, 加工出了实验原型机 (图 10 (a)), 通过实际操作验证, 机器人侧和工具侧能 够在误差允许的范围下完成对接与分离 (图 10 (b)) 。 将加工出来的实验样机安装在滚珠丝杆测试滑台上进行 极限载荷测试 (图 10 (c)), 通过滚珠丝杆测试滑台来 给快换装置施加弯矩和拉力载荷, 载荷次数设置为 20 万 次, 随着载荷的不断增加直到达到其临界值, 快换装置 所受载荷逐渐超过了零部件的许用承载能力, 最终零件 发生破坏 (图 10 (d)), 破坏部位为端盖主体与球槽的 连接处, 与仿真结果一致。
4 结束语
本文设计了一款重载型快换装置, 在原有设计的基 础上对锁紧机构和切换机构的核心零部件进行了重新设 计与计算, 工具侧主体采用了分体式设计, 有效减轻了 整个装置的装配重量。
运用有限元仿真技术对锁紧机构的核心部件进行了 强度校核, 得出的结果表明快换装置的核心锁紧部件在 受到极限弯矩状态下会产生最大的应力, 最大应力出现在锁紧端盖的主体与球槽的连接部位, 并通过实验验证了 仿真所得结果, 为以后的快换装置设计提供了设计依据。
参考文献:
[1] 工业炉编辑部 . 《中国制造 2025》 解读之:中国制造 2025.我 国制造强国建设的宏伟蓝图[J]. 工业炉,2022.44(3):42-49.
[2] 孙维, 张咏行,赵永杰,等 . 重载工业机器人研究现状[J]. 汕头大 学学报(自然科学版),2020.35(1):3- 15.
[3] 周倪敏,刘超峰, 张航,等 . 立面三维可越障清洁机器人系统[J]. 轻工机械,2021.39(2):12- 16.
[4] 张勇 . 核工业自动化设备中易损件快换方法及装置的研究 [D]. 杭州:浙江科技学院,2021.23(1):16-23.
[5] 陈文华,杜勝利,杨帆,等 . 分离脱落电连接器钢珠锁紧机构解 锁可靠性分析[J]. 工程设计学报,2017.24(3):280-285.
[6] 吴宇迪, 刘军, 邹树梁 . 机器人末端快换装置发展概况及关键 技术分析[J]. 现代制造技术与装备,2021. 57(8):3- 11.
[7] 代洪宇, 史海欧,冯超,等 . 基于有限元的交流刚性接触网定位 点刚度仿真研究[J]. 电气化铁道,2020.31(2):5- 12.
[8] 代洪宇, 史海欧,冯超,等 . 基于有限元的交流刚性接触网定位 点刚度仿真研究[J]. 电气化铁道,2020.31(2):7- 15.
[9] 佘媛芳 . 机械可靠性设计方式与原理分析[J]. 湖北农机化 , 2019(11):70-71.
[10] Hao Na, Li Xu, Li Yanlong, et al. A novel reliability-based method of calibrating safety factor: Application to the cemented sand and gravel dams[J].Engineering Geology,2022.306.
[11] 何文卿, 阮毅,胡国颖,等 . 冷室压力铸造在快压射阶段的压射 过程对铝合金铸件表面质量的影响[J]. 机电工程技术,2022. 51(8):10- 13.
[12] 钱鹏飞, 罗辉,单位银,等 . 新型双作用气浮气缸优化设计及其 工况分析[J]. 西安交通大学学报,2022.56(3):12-21.
[13] 韩传军, 张瀚, 张杰 . 星形橡胶密封圈的密封特性分析及截面 改进[J]. 机械设计与研究,2015.31(4):0148.
[14] Zhang T. Robust reliability-based optimization with a moment method for hydraulic pump sealing design[J]. Structural and Multidisciplinary Optimization, 2018. 58.
[15] Oh Jungwhan, Choi Sunghoon, Hwang Jiyoung, et al. Identifica ‐ tion and Reconstruction of Impact Load for Lightweight Designof Production Equipment[J].Applied Sciences,2022. 12(6).
[16] 林纯景 . 基于 HyperMesh 的有限元网格划分技术[C]//澳汰尔 工程软件(上海)有限公司 .2021Altair 技术大会论文集 .
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65663.html