SCI论文(www.lunwensci.com):
摘 要 :针对采用实验测试方法获得金属橡胶材料的动态特性存在成本高、周期长的问题,本文基于金属橡胶的超弹性和粘弹 性特性建立金属橡胶材料的 Mooney-Rivlin 超弹性模型和 Bergström–Boyce 粘弹性滞后模型,进而通过有限元仿真获得金属橡胶 的动态力学特性,对比仿真结果与实验测试数据,表明该有限元模型得出迟滞曲线与试验测得的迟滞数据重合得较好,可以很 好地表达出金属橡胶的动态力学性能, 为研究金属橡胶的动态特性提供一种新的有效方法。
关键词 :金属橡胶;动态特性;有限元计算;模型
金属橡胶是一种具备高弹性高阻尼性能材料,可用于制作 新型减振元件,在国防、航空航天、尖端武器装备等军工领域中 具有广泛的应用前景。金属橡胶的力学特性, 尤其是其动态力学 特性对其隔振效果有着重要的影响 [1]。试验表明,金属橡胶隔振 器的动态特性具有超弹性和粘弹性两类性质 [2]。因此,对金属橡 胶隔振器的动态性能的预测难度较大,一般需要反复地设计和 试验才能获得满意的橡胶隔振器动态性能 [3]。随着有限元软件技 术的开发,现有商业非线性有限元软件已经有计算金属橡胶超 弹性,粘弹性及体积近似不可压缩的有限元计算能力,由此,可 使用有限元软件来对金属橡胶产品设计和开发。
1 金属橡胶的有限元仿真
为研究金属橡胶的特性需建立有其限元模型,设置材料参 数,定义初始条件。由于金属橡胶具有超弹性和粘弹性两个特 点,应分别建立超弹性和粘弹性理论模型。通过金属橡胶拉压实验数据获得模型的基本参数, 再对模型进行动态仿真, 得到金属 橡胶部件的迟滞曲线 [4]。有限元的分析流程如下图 1。
 图 1 有限元分析流程
图 1 有限元分析流程
1.1 金属橡胶有限元建模
首先创建金属橡胶圆柱件的模型,上下各加两款钢板。由于钢 板的刚度远大于金属橡胶的刚度,为分析方便,在模型中将两块板 设置为刚体, 金属橡胶部件与刚体建立接触后, 如下图2所示。
 图 2 有限元分析模型建立
图 2 有限元分析模型建立
1.2 模型参数设置
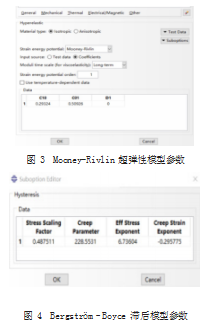
有限元ABAQUS软件中集成了一些超弹性和粘弹性理论模 型,在本文中选用Mooney-Rivlin 超弹性理论模型和Bergström– Boyce粘弹性理论模型来描述金属橡胶的超弹性和粘弹性特性 [5]。 Mooney-Rivlin超弹性理论模型很常用, 能模拟很多超弹性材料的 力学特征,多用于中小变形,应变约为 100%(拉伸)和 30%(压 缩)的状况。Bergström–Boyce 滞后模型本质上是一种经验模型, 能更准确的表达橡胶等粘弹性材料滞回特性。为了获取这些理论 模型的参数,需要对金属橡胶材料进行相应试验,如单轴拉伸、 松弛、蠕变以及DMA 扫频等等 [6]。
本试验选用材料试验机的单轴拉伸试验来确定模型中材料 常数把金属橡胶在材料试验机进行的试验数据导入到ABAQUS 中的超弹性和粘弹性模型窗口,拟合得到Mooney-Rivlin模型和 Bergström–Boyce 滞后模型参数。模型参数辨识结果如图 3、图4所示。
1.3 模型计算及结果
模型建立并设置后参数后就可以对有限元模型进行网格划 分及计算。在分析过程中,先静态分析,再进行动态分析。将金 属橡胶的下板固定, 在上板上根据需要施加不同的载荷。比如要 施加频率为 10Hz,振幅为 1mm 的激励,就在上板上施加大小为 A=sin(20×π×t), 方向为 Z 轴的激励。选择瞬态分析,选择每个 子步写入结果文件, 其余设置默认, 最后进行求解。
按照上述步骤建立好模型并提交分析,仿真结果如下图 5所 示。分别提取上板某点的位移和下板某点的约束反力, 即可得到 金属橡胶的迟滞曲线图。
 图 5 有限元仿真结果
图 5 有限元仿真结果
2 动态特性试验
为验证有限元模型的仿真结果,需对金属橡胶的动态力学 特性进行物理测试。
2.1 材料试验机及分析软件
本章的试验是在ElectroForce3330 多功能试验机设备上进行 的,该试验机配置有WinTest测试软件,可以计算被测试金属橡 胶部件的载荷—位移曲线、动态刚度、滞后角等参数。该实验装 置主如下图 6所示。
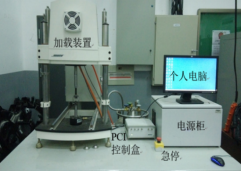
图 6 ElectroForce 3330 多功能试验机
2.2 试验内容
本文实验的试件材质是 :奥氏体不锈钢 1Cr18Ni9Ti金属丝, 其丝线的密度, 经过制备工艺最后得到成型的金属橡胶试件, 其 外形尺寸是。本文实验采取的方法是控制变量法, 用多功能试验 机进行动态拉压试验, 影响金属橡胶的动态特性的外部条件, 如 激励频率、振幅进行分组试验, 详细参数如表 1所示。
在2# 试验中,激励其频率为20Hz,施加激励振幅为 ±0.5、 ±1.0、±1.5、±2.0、±2.5、±3.0mm, 其载荷—位移迟滞回线如图 7。
 图 7 不同振幅下迟滞回线变化
图 7 不同振幅下迟滞回线变化
在ABAQUS软件的后处理中处理位移与支反力的关系,可 以发现应力与应变之间存在一定的相位差。应力应变曲线形成 了一个迟滞曲线环,该迟滞环的面积就表示能量损耗多少,迟 滞回线的形状是金属橡胶超弹性和粘弹性共同作用的结果。由 于篇幅限制,图 8 分别给出频率为 10Hz,振幅为 1mm 和频率为 20Hz, 振幅为2mm 的仿真和实验结果。
图 8 恢复力—位移关系曲线(线为仿真结果, 点为实际实验数据)
从图 8 的结果可以看出有限元仿真的迟滞曲线和实验得出 的数据吻合较好, 误差比较小, 这说明所建立的超弹性和粘弹理 论模型的可以很好的模拟金属橡胶材料的超弹性和粘弹性动态 特性。
4 结论
本文应用有限元软件,结合金属橡胶的单向拉伸实验数据, 建立金属橡胶 的超弹性 Mooney-Rivlin 理论模型和 Bergström- Boyce 滞后模型,获得金属橡胶材料的迟滞曲线。实验测试和仿 真结果表明,该有限元模型得出迟滞曲线与试验测得的迟滞数 据重合得比较好,因此用有限元法对金属橡胶材料的建模和研 究可以模拟出金属橡胶材料的实际动态特征,这将会大大降低 金属橡胶的测试成本。
参考文献
[1] 余慧杰 , 刘文慧 , 王亚苏 . 金属橡胶静刚度特性及其力学模型研究 [J]. 中国机 械工程 ,2016,27(23):3167-3171.
[2] 李宇燕, 黄协清 . 金属橡胶材料的非线性刚度 [J]. 兵工学报 .2008,29(7):819-823.
[3] 马艳红, 陆宏伟, 朱海雄等 . 弹性环金属橡胶支承结构刚度设计与试验验证 [J]. 航空学报 .2013(06):1301-1308.
[4] Yu H,Sun X,Xu J,et al.Transition sets analysis based parametrical design of nonlinear metal rubber isolator[J].International Journal of Non-Linear Mechanics,2017,96.
[5] Bergström J S,Boyce M C.Constitutive modeling of the large strain time- dependent behavior of elastomers[J].Journal of the Mechanics&Physics of Solids,1998,46(5):931-954.
[6] 明杰婷 . 橡胶材料粘弹性本构模型的研究及其在胎面橡胶块上的应用 [D]. 吉 林大学 ,2016.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/35740.html