SCI论文(www.lunwensci.com)
摘要:为了减少螺旋桨零件的研发时间, 降低公司成本, 以螺旋桨零件为例, 针对螺旋桨零件提出一种基于非接触式手持式激光 扫描仪设备和三维建模软件 UG 的逆向建模的方法 。详细介绍了使用设备扫描螺旋桨零件, 以获取螺旋桨零件的数据, 使用 UG 软 件对螺旋桨零件进行逆向建模, 使用 Geomagic Quality 软件将逆向建模完成的三维 CAD 模型和手持式激光扫描仪设备采集螺旋桨零 件完成的 STL 模型进行偏差分析, 根据偏差分析的结果, 从设备 、数据采集环境 、数据采集人员 、数据采集方法等方面全面考虑 影响测量结果的因素, 然后建立数学模型, 进行不确定度评定, 更加严谨地判断螺旋桨零件逆向建模完成的三维 CAD 模型是否合 格, 结果发现逆向建模完成的模型在要求范围内, 验证了这种逆向建模的方法, 为判断产品逆向建模提供参考。
关键词 :螺旋桨,逆向建模,偏差分析,不确定度评定,数据采集
Research on Reverse Modeling of Propeller Parts
Liang Tuzhen1. Yi Xianqin2. Liu Huagang3
( 1. Guangzhou Electromechanical Technician College, Guangzhou 510435. China; 2. Guangdong Polytechnic of Light Industry,
Guangzhou 510300. China; 3.Beijing Electronic Technology Vocational College, Beijing 100176. China)
Abstract: In order to reduce the development time of propeller parts and the cost of the company, a reverse modeling method based on non- contact handheld laser scanner and 3D modeling software UG was proposed for propeller parts. The use of equipment was introduced in detail to scan propeller parts to obtain data of propeller parts, the UG software was used to reverse modeling of propeller parts, Geomagic Quality software was used to reverse modeling 3D CAD model and hand-held laser scanner equipment to collect the completed STL model of propeller parts for deviation analysis. According to the result of deviation analysis, the factors affecting the measurement results were comprehensively considered from the aspects of equipment, data acquisition environment, data acquisition personnel, data acquisition methods, etc., and then a mathematical model was established to evaluate the uncertainty . It was more rigorous to judge whether the 3D CAD model of propeller parts reverse modeling was qualified. It was found that the model of reverse modeling was within the required range, which verified this reverse modeling method and provided a reference for judging the reverse modeling of products .
Key words: propeller; reverse modeling; deviation analysis; uncertainty evaluation; data acquisition
0 引言
逆向工程技术是将实物模型快速转化为三维 CAD 模型, 并在此基础上进行产品的再设计 、再生产的过程[1], 是产品开发设计的一种手段, 得到了快速发展和广泛应 用[2] 。逆向建模是逆向工程技术的一部分, 是将设备采 集到的数据, 使用 UG 、Pro/e 、CATIA 、Geomagic 等软 件根据采集数据的特征进行建模 、偏差分析的过程 。通 常逆向建模主要分为 4 个部分: ( 1 ) 产品数据采集, 采 用手持式激光扫描仪等设备对产品实物进行数据采集; ( 2 ) 产品模型重构, 以采集完成的数据为基础, 使用三 维建模软件对产品进行模型重构; (3 ) 产品偏差分析, 对完成的逆向建模的数据, 使用偏差分析软件将逆向完 成的三维 CAD 模型和采集实物的数据进行偏差分析;( 4 ) 逆向结果的判断, 根据偏差分析的数据, 计算不确定度, 根据计算结果对逆向完成的三维CAD 模型进行判断。
目前从知网 、万方等主流网站搜索逆向建模零件的 误差分析, 主要是建模完成的模型和扫描的点云数据进 行比对, 没有考虑数据采集 、模型重构 、偏差分析等过 程中产生的误差, 在零件逆向建模过程中引入不确定度 评定的研究是少之又少 。本文以螺旋桨零件的逆向建模 为例, 螺旋桨零件是设备的核心元件, 螺旋桨零件设计 的优劣将直接影响设备的整体性能[3], 对螺旋桨零件逆 向建模整个过程引入导致逆向结果的不确定度分析和评 定, 从人 、机 、料 、法 、环等方面进行全面考虑, 使得 判断螺旋桨零件的逆向结果更加准确 。螺旋桨零件的逆 向建模流程如图 1 所示。
1 数据采集
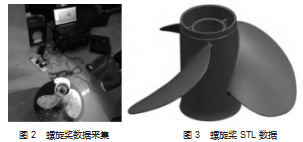
数据采集是逆向建模的重要环节, 零件采集的数据是否完整或者破损影响着逆向建模, 数据采集不完整, 设计者无法根据采集的数据进行建模, 特别是有曲面特 征的 。产品数据采集主要分接触式和非接触式两种采集 方法[4] 。要求本次螺旋桨零件逆向建模误差在±0. 1 mm 内 。 由于螺旋桨零件是复杂的曲面, 如果使用接触式设 备进行数据采集的话, 在曲面上一个个取点, 需要取很 多点, 效率极低, 所以使用非接触式设备对螺旋桨零件 进行数据采集 。本文使用对螺旋桨零件数据采集的非接 触式设备是形创 MAXscan 手持式激光扫描仪, 根据说明 书 查 得 这 款 手 持 式 激 光 扫 描 仪 的 允 许 误 差 为: 0.02+ 0.025 L/1 000 mm, 其中 L 为被采集数据实物的尺寸 。在 使用手持式激光扫描仪之前, 需要在螺旋桨表面贴上标 记点以便于在扫描过程中的定位[5], 然后使用设备对螺 旋桨零件进行扫描, 如图 2 所示。
螺旋桨在数据采集过程中, 由于是激光非接触式扫描, 还有采集到与数据无关的数据, 在手持式激光扫描 仪数据采集软件中直接选中多余的数据删除即可, 最后 完成的螺旋桨 STL 数据如图 3 所示。
2 模型重构
常用模型重构的软件有 UG 、Pro/E 、Geomagic 等, 本文螺旋桨模型重构使用的是 UG 软件, UG 软件是一款 功能比较强大的软件[6], 也是目前主流软件, 在制造企 业用得非常多, 可以设计 、出图 、编写加工程序等 。打 开 UG 软件, 将手持式激光扫描仪采集螺旋桨 STL 数据导 入软件中。螺旋桨的模型重构可以分成两个部分来, 一个是 浆毂部分, 另外一个就是叶片部分 。浆毂部分的模型 重构根据螺旋桨 STL 数据, 使用直线 、修剪曲线 、拉 伸等指令重构桨毂部分, 如图 4 所示, 浆毂部分模型 重构完成 。
叶片曲面的的重构比较复杂, 要求也比较高, 通常 用于曲面重构的方法有 3 种: 以 Bezier 曲线进行曲面重 构; 以 B 样条曲线为基础的曲面重构; 以 NURBS 为基础 的曲面重构 。本文采用第 3 种方法, 即以 NURBS 为基础 的曲面重构。
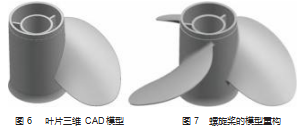
根据螺旋桨叶片的特点, 有 3 个一样的叶片, 那么 只需要完成其中一个叶片曲面的重构, 其他通过 UG 软 件阵列即可 。根据螺旋桨 STL 数据, 使用 UG 软件创建多 条的 NURBS 曲线, 然后通过扫掠, X 成形等指令, 对重 构叶片的曲面进行精度 、曲率等进行调整, 并且进行重 构叶片曲面的光顺进行检测, 如图 5 所示, 叶片曲面非 常光顺。
以同样的方法重构叶片的另外一张曲面, 重构完 成后, 根据螺旋桨 STL 数据, 使用 UG 软件曲面上的曲 线, 拉伸等指令创建叶片曲面的边界, 然后通过修剪 曲面, 缝合等指令完成叶片三维 CAD 模型的重构, 如 图 6 所示 。其他叶片通过阵列就可以完成, 最后将所 有叶片和桨毂合并, 倒圆角, 完成螺旋桨的模型重构, 如图 7 所示 。
3 螺旋桨偏差分析
由于螺旋桨在数据采集 、模型重构等过程中有许多 不确定的因素, 影响着逆向结果的准确性 。所以, 对最 终用 UG 软件完成的三维 CAD 模型进行整体的偏差分析是必要的 。本文使用 UG 软件将逆向建模完成的数据和 设备采集零件完成的 STL 数据进行比对, 输出测量结果, 然后通过计算来判断重构模型的精度是否符合要求[7]。
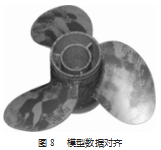
首 先 使 用 UG 软 件将 完 成 的 螺 旋 桨 三 维CAD 模 型 保 存 为 . STEP格 式, 再 将 螺 旋 桨 .STEP 格式的模型和采集螺旋桨完成的 STL 模型导入在 Geomagic Quality软 件, 然 后 使 用 Geo⁃magic Quality 软 件 进 行偏差分析[8], 在偏差分析前, 将螺旋桨 .STEP 格式的模型 和采集螺旋桨完成的 STL 模型用最佳拟合对齐方法对齐, 保持坐标一致, 如图 8 所示。
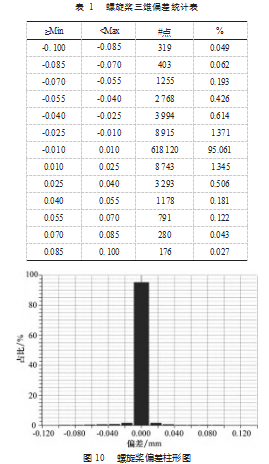
通过模型的比较可知零件的偏差图, 每个特征测量 10 次, 如图 9 所示; 螺旋桨三维偏差统计表如表 1 所示; 螺旋桨偏差柱形图如图 10 所示。
根据螺旋桨三维偏差图 、螺旋桨三维偏差统计表 、 螺旋桨偏差柱形图可以知道, 误差在±0. 1 mm 范围内有 95.061%, 那么还有一小部分的数据点没有在误差范围 内, 通过螺旋桨三维偏差图结合螺旋桨实物, 分析出的 原因是螺旋桨由于长时间使用, 导致叶片的边缘和叶片 表面出现磨损 、变形, 使得在使用 UG 软件对叶片模型 重构时, 使用阵列指令, 完成其他两片叶片模型的重构,出现这种误差也是正常的, 3 个叶片均匀分布也是螺旋 桨本身的要求。
那么根据以上的偏差分析, 对螺旋桨逆向建模完成 的三维 CAD 模型都在±0. 1 mm 范围内, 就判断合格, 这 是不对的, 螺旋桨数据采集所使用的设备 、测量过程等 都存在误差, 要对结果进行判断, 那么就应考虑这些不 确定度因素对测量结果的影响。
4 不确定度评定
测量不确定度评定有测 量不确定度 A 类评定和测量 不 确 定 度 B 类 评 定[9] 。测 量 不 确 定 度 评 定 流 程 如 图 11 所示。
本文以螺旋桨其中一个 叶片面 A001~A010 的偏差检 测结果为例, 要判断是否合 格时, 要考虑整个影响测量 结果的因素 。分析测量不确 定 度 的 来 源, 从 人 、 机 、料 、法 、环等方面进行全面考虑, 特别要注意对测量结 果影响较大的不确定度来源, 应尽量做到不遗漏 、不重 复[10] 。要考虑每个不确定度的贡献量, 对于贡献小的分 量, 可以忽略不计。
本次测量不确定度的来源及说明如表 2 所示。
不确定度计算过程如下。
( 1 ) 建立数学模型:
ΔL = Lc - L0
式中: ΔL 为长度示值误差; Lc 为长度实测值; L0 为长度 真值; 单位均为 mm。
( 2 ) 灵敏系数:
uc 2 ( δL ) = ∂f/∂Li ]2 u2 ( Li ), c 1 = ∂δL /∂Lc = 1.
c2 = ∂δL /∂L0 = - 1.
( 3 ) 设备引入的标准不确定度分量 u 1 ( Lc ), 根据设 备允许误差为: 0.02+0.025 L/1 000 mm, L 为被测尺寸 。 本次螺旋桨被测叶片尺寸为 200 mm, 符合均匀分布,
k =, 则: u 1 ( Lc ) = 允k差 = =0.014 4 (mm )
( 4 ) 测量重复性引入的标准不确定度分量 u2 ( Lc ), 根据表 1 重复测量结果, 由贝塞尔公式得:
s ( Lk ) = 式中: Li 为第 i 次测量的结果, mm;为所考虑的 n 次测 量结果的算术平均值, mm; n 为测量次数。则:
u2 ( Lc ) = s ( Lk )/= 0.001 8 mm
式中: n 为测量次数。
( 5 ) 探测误差引入的标准不确定分量 u3 ( Lc ), 根据 设备说明书查得探测误差为: Ep = 0.02 mm, 符合均匀 分布, k =, 则:
u3 ( Lc ) == = 0.011 5 (mm )
( 6 ) 分辨率引入的标准不确定分量 u4 ( Lc ), 本次测
量分辨率为 1 µm, 则:
u4 ( Lc ) == = = 0.000 3 (mm )
式中: a 为区间半宽, a = δx /2; δx 为分辨率; 假设均匀 分布, k =。
( 7 ) 合成标准不确定度, 主要的标准不确定度分量 汇总如表 3 所示。
分辨率引入的标准不确定分量和测量重复性引入的 标准不确定度分量取其中一个最大值即可, 因为 u2 ( Lc ) > u4 ( Lc ), 则合成不确定度计算:
uc = = 0.018 5 mm
( 8 ) 扩 展 不 确 定 度 U 的 计 算, 取 包 含 因 子 k = 2. 则:
U = uc k = 0.018 5 × 2 = 0.037 0 (mm )
5 结果判断
根 据 A001~A010 的 10 次 测 量 结 果 分 别 为 : 0.001 mm、-0.002 mm 、0.011 mm、-0.010 mm、0.006 mm、 -0.002mm、-0.002mm、-0.002mm、-0.003 mm、0.001 mm; 测量不确定度为 0.037 0 mm, 意思是说, 有 0.037 0 mm 的误差导致测量结果可能正确, 也有可能不正确 。本次 螺旋桨客户要求误差在±0. 1 mm 内, 有 0.037 0 mm 的不 确定度, 所以当测量结果在[0.063 mm, 0.0137 mm] 和 [-0.013 7 mm, 0.006 3 mm]内, 测量结果可能合格也有可 能 不 合 格, 不 可 以 做 绝 对 性 的 判 断; 当 测 量 结 果 在 ( 0.013 7 mm, +∞) 和 ( -∞, -0.013 7 mm) 范围内, 可以 直接判断不合格; 当测量结果在 ( -0.063 mm, 0.063 mm) 范围内, 可以判断是合格的, 根据叶片 A001~A010 的 10 次 测 量 结 果 可 知, 测 量 结 果 都 落 在 ( -0.063 mm, 0.063 mm) 范围内, 可以判断此次逆向模型是合格。
6 结束语
使用三维软件 UG 进行逆向建模, Geomagic Quality 软件进行精度分析, 完成的数据更加准确[11] 。测量结果 的可用性很大程度上取决于其不确定度的大小[12] 。本文 以螺旋桨零件为例, 通过手持式激光扫描仪 、UG 软件、Geomagic Quality 软件相结合, 探索出一条产品逆向建模 的路线: 从产品实物数据采集, 数据处理, 模型重构, 偏差分析, 不确定度评定及结果判定的整个过程 。该逆 向建模的技术路线意义在于:
( 1 ) 使用手持式激光扫描仪设备采集产品实物数据, 精度高 、采集数据速度快 、避免对产品损伤等。
( 2 ) 将逆向构建模型和实物扫描模型进行 3D 比较分析, 有效地检验产品构建后的质量, 并且全面考虑了测量 不确定度的来源, 各个分量贡献大小, 最后用测量不确 定度评定来保障测量结果的准确性, 使得判断更加严谨。
( 3 ) 该技术路线为判断逆向建模完成的三维 CAD 模 型是否合格, 具有很大的借鉴作用。
参考文献:
[1] 陈超,郑攀,李猛猛,等 . 螺旋桨的逆向建模研究[J]. 机械设计与 制造,2020(9):271-275.
[2] 王宝中, 张富明,路春光,等 . 正逆向建模在电动汽车外观曲面 造型中的应用研究[J]. 机械设计与制造,2018(2):131- 134.
[3] 付大鹏,王小旭,程艳艳 . 螺旋桨的逆向造型方法与研究[J]. 制 造业自动化,2011.33(16):125- 127.
[4] 丁倩岚 . 无人机螺旋桨气动性能实验与数值模拟仿真研究 [D]. 天津:天津大学,2015.
[5] 管官,顾文文,杨蕖 . 基于逆向工程的螺旋桨数字化检测方法 [J]. 船海工程,2018.47(5):23-26.
[6] 孙海龙,刘月英 . 叶片检测技术及在 UG 软件中的应用研究[J]. 计测技术,2017.37(S1):1-6.
[7] 张文灼 . 基于 Geomagic 的汽车节温器盖逆向工程设计及其型 面精度检测技术研究[D]. 石家庄:河北科技大学,2018.
[8] 王雅为 . 基于 Geomagic 的零件型面精度检测及分析[D]. 哈尔 滨:哈尔滨理工大学,2017.
[9] 楚斌 . 关于测量结果不确定度评定的思考[J]. 铁道技术监督, 2018.46(9):9- 11.
[10] JJF- 1059. 1-2012.测量不确定度评定与表示[S].
[11] 谢黧 . 易拉罐印刷机用滚筒的逆向建模研究[J]. 机电工程技 术,2021.50(5):40-44.
[12] 王东霞, 宋爱国 . 基于三坐标测量机的圆度误差不确定度评 估[J]. 东南大学学报(自然科学版),2014.44(5):952-956.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/56974.html