SCI论文(www.lunwensci.com):
摘要:为了提高学生对于机械结构的认知能力和综合运用能力,抓住机器人这一热门元素,设计了一款基于机械结构的教具机器人。机器人采用仿人型设计,由头部、身体、手臂和腿部结构4部分组成,重点对头部、手臂和腿部进行了设计,头部和手臂由常用的曲柄摇杆机构组成,腿部由杨森连杆机构组成,各部均由电机通过齿轮机构带动各机构实现动作,头部和手臂采用SG90舵机驱动,腿部采用转矩较大的BM8206微型直流电动机驱动。头部可实现上下点头动作,手臂可上下摆动,腿部能完成两足同时抬落的行走动作。机器人的建模和组装使用SolidWorks完成,并进行了运动仿真,获得了头部运动曲线和腿部行走轨迹,验证了设计方案的可行性。可以通过3D打印方式获得实物模型,以辅助机械类课程的教学或者机器人方面的研究工作。
关键词:机器人;类人形;机构设计;SolidWorks;运动仿真
Mechanism Design and Motion Simulation of Humanoidrobot
Wu Jinhai,Zhang Yanhua※,Huang Ziqiang,Zhang Shuping,Li Zhenzhen
(College of Mechanical and Electrical Engineering,Guangdong University of Science and Technology,Dongguan,Guangdong 523083,China)
Abstract:In order to improve students'cognitive ability and comprehensive application ability of mechanical structure and grasp the hot element of robot,a teaching aid robot based on mechanical structure was designed.The robot adopted humanoid design,which was composed of head,body,arm and leg structure.It focused on the design of head,arm and leg.The head and arm were composed of common crank rocker mechanism,and the legs were composed of Janssen connecting rod mechanism.Each part was driven by motor through gear mechanism,and the head and arm were driven by SG90 steering gear,the legs were driven by BM8206 micro DC motor with large torque.The head could nod up and down,the arms could swing up and down,and the legs could complete the walking action of lifting and falling both feet at the same time.The modeling and assembly of the robot were completed by SolidWorks,and the motion simulation was carried out.The head motion curve and leg walking trajectory were obtained,which verified the feasibility of the design scheme.The physical model can be obtained by 3D printing to assist the teaching of mechanical courses or the research work of robots.
Key words:robot;humanoid modality;mechanism design;SolidWorks;motion
0引言
由于对机器人和高效机器学习的预测是第四次工业革命的基石,各国需要采取一项长期战略来应对自动化的潜在挑战,而教育必须是这项长期战略的中心[1]。近年来,机器人教育慢慢成为了热点,很多机器人教育、编程教育培训应运而生,一些中小学也开设了机器人课程[2]。机器人教育的目的是让承载着新的使命的年轻一代们从小接触这一先进事物,从感兴趣开始,到知道机器人的原理应用,到简单机器人的制作,到真正爱上机器人技术,为国家科技水平的进一步提高储备优秀人才。
机器人技术融合了机械原理、电子传感器、计算机软硬件及人工智能等众多先进技术[3]。作为机械类专业的大学生,熟悉各种常用的机构,并能够灵活运用,是必不可少的技能。但在实际教学中,使用的各机构的案例相对分散,因此设计一款集各机构于一体的结构简单合理、趣味十足的教具机器人是非常有意义的。由于类人机器人仿人形的机构设计,及其具有未来进入家庭或代替人类去完成危险工作的先天优势,使得对类人机器人的研究不仅具有学术意义,还有很高的应用价值。
本文设计的机器人是一种面向家庭服务、娱乐教育的机器人,目的在于增加课堂教学的直观性和趣味性。故在对其进行设计的时候,把握以下几点设计要求:(1)机器人的结构组成应以常用的机械结构为依托,驱动方式简单;(2)机器人的整体结构设计应该便于用户装拆,不仅有利于研发阶段的安装调试,也有利于机器人接线不良等情况下的维修;(3)机器人优先实现类人形动作的功能,但是仍然应该留足空间,方便以后其他功能的拓展,比如多开孔便于以后传感器的安装,同时也能减轻机器人的质量。
1总体方案设计
1.1机械设计
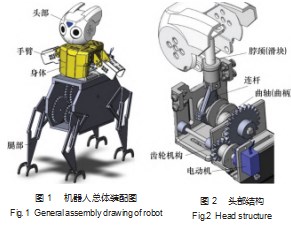
要想保证机器人身体平衡并能实现基础动作和复杂动作,机器人的硬件机械设计很重要[4]。此次设计出的机器人机构如图1所示,主要包括头部、身体、手臂和腿部行走机构[5]。
其中手臂部件分为左臂和右臂,分别位于身体的左右两侧;腿部行走机构位于身体的下方。头部和左右手臂由1个电动机通过曲轴带动曲柄滑块机构完成动作。其腿部为杨森行走连杆机构,由1个驱动电机驱动腿部连杆机构,带动4个足部交替行走[6]。身体部件只进行了造型设计。
此机器人设计采用的主要传动方式包括电动机、齿轮机构、复合连杆机构等,可以用于教学中做机构传动的演示,可使用SolidWorks进行模型的展示或动作模拟,也可以3D打印成型组装实物演示。
1.2驱动选择
在机器人的驱动方式选择上,主要有步进电机、直流电机、舵机等可供选型使用。舵机依赖其简单的控制及角度控制,有着非常普遍的应用,特别是在小型机械手臂、航模中,本文选用SG90舵机作为人形部分的驱动电机。
直流电机作为常见的普通电机,其在各种玩具中使用较多,且其启动特性和调速特性较好,调速范围宽广,在不同输入驱动电压的条件下,可以输出不同的转速,且调速特性较平滑,此外,直流电机具备较高的过载能力,特别是起动和制动的瞬间能够具有较高的转矩。本文设计的四足人形机器人,其底盘结构在运动过程中需要启停具有较大的转矩,且希望能够具有较宽的调速范围,因此,本文设计的人形机器人足部采用BM8206微型直流电动机进行驱动。
2机构设计
2.1头部
2.1.1机构
头部机构设计通过单电机经齿轮机构驱动一根主轴,主轴为一曲轴,如图2所示,此曲轴同时要带动手臂实现运动,图中隐藏了手臂部分零部件。主轴与各运动输出是通过曲柄滑块的机械结构实现的。
驱动电机通过齿轮传动带动曲轴进行旋转运动,曲轴的旋转作用类似于曲柄绕着某个点旋转,连杆的一端开有与曲轴等径但与曲轴间隙配合的圆孔,实现铰接的效果,连杆的另一端与上下移动的脖颈连接,曲轴带动连杆周期性运动,从而带动滑块周期性往复运动,滑块与机器人头部固定连接,从而带动头部上下往复运动,实现点头的效果。
2.1.2造型
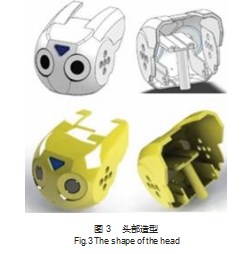
头部的外观形象直接影响到了机器人整体给人的感觉,大部分零售机器人设计出恰到好处的人类特质,让它们看起来十分友善,但是外表上还是和人类有所区别,暗示它们不会取代人类,给人们以自信。基于这些社会心理学因素,对头部采用曲面造型进行三维建模,使用PhotoView360进行了外观设置和渲染,造型和渲染效果如图3所示,外观可爱,引人注目。
2.2手臂
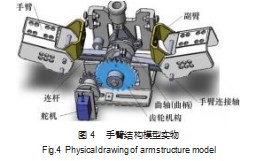
手臂结构如图4所示,驱动电机通过齿轮传动带动曲轴进行旋转运动,曲轴的主轴与曲轴上的圆非同心圆,所以在曲轴的主轴旋转时会带动曲轴上的圆进行旋转,曲轴的旋转作用类似于曲柄绕着某个点旋转,连杆的一端开有与曲轴等径但与曲轴间隙配合的圆孔,实现铰接的效果,在主轴旋转的时候,主轴上的圆会带动连杆进行运动,连杆的另一端与手臂连接轴相连,又因为手臂上有固定连接轴,所以连杆推动连接轴的时候,曲轴带动连杆周期性运动,从而带动手臂周期性往复运动,手臂将会进行上下摆动,实现手臂摇摆动作的效果。
2.3腿部
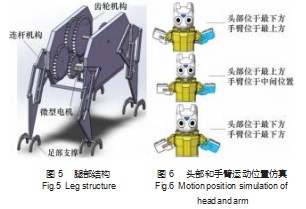
机器人腿部结构的设计是机器人的关键部分,为了适应家庭环境快速灵活地移动,必须满足以下几个基本条件:(1)稳定行走;(2)具有较强的地形适应能力[7]。在实际中,足式机器人的行走机构大都采用连杆机构[8],本文机器人腿部设计为一款以杨森行走连杆[9]为基础的四足行走机构[10-11],以单动力纯机械传动驱动整个机器人腿部,即使用微型电动机作为整体动力代替杨森行走机器人中的风力驱动通过齿轮传动的方式让其以恒定的步态实现四足行走的目的,如图5所示。由于腿部上方还有人形部分结构,为了使机器人运动起来更加平稳,改善整体的不平衡,最简单方法就是增大每只脚与地面的接触面积,这就必须在每个腿部安装多一个类似脚板的部件。
3运动仿真
3.1头部和手臂仿真
机器人的头部和手臂是由一个电动机通过同一根曲轴带动相应的机械结构完成动作,故二者的动作是联动的,其对应的位置如图6所示。
对于头部的运动,使用SolidWorks的Motion插件进行了运动分析,得到的头部位移曲线如图7所示。
3.2腿部行走动作轨迹
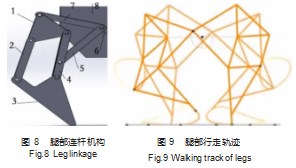
机器人的4个腿部结构均采用曲柄摇杆原理的多连杆复合机构实现运动,如图8所示,由7个构件组成(不含机架),运动副含有10个低副,其中包含3个复合铰链,自由度为1,可实现确定的相对运动[12]。
腿部结构中,机架8为固定件,曲柄6为动力部件并做匀速转动,动力和运动通过连杆7、4、1、2、5,最终传递至连杆3,实现足部的移动和支撑。
通过SolidWorks软件的基本运动仿真的观察,可以得出整个腿部四足行走机构的步态行走轨迹如图9所示。从图中可以看出每次抬脚落脚都是对角的两只腿部同时运动,以此来实现行走动作。
4结束语
本文充分考虑使用环境、成本控制、控制方案等,设计出一款人形机器人的机械结构,利用SolidWorks软件为手段,将各机械机构进行灵活应用,并很好地结合,最终获得一个可以辅助教学的模型,对于机械类相关课程的教学及机器人的研究都能提供很大的帮助。并为后续机器人的自动化控制提供机械基础。本文的主要内容和成果如下。
(1)结合人形家庭服务机器人的应用特点,提出了一种人形机器人设计方案,并对头部结构、手臂结构及腿部功能结构进行了详细的设计。
(2)利用SolidWorks软件建立了仿人形机器人的相关零部件的三维模型,并装配生成人形机器人的总装图。
(3)运用SolidWorks软件对机器人头部、手臂和腿部的功能设计进行了运动模拟和仿真。
参考文献:
[1]Mishra Deepti.A Framework for Using Humanoid Robots in the School Learning Environment[J].Electronics,2021,10(6):756-756.
[2]卢宇,汤筱玙,宋佳宸,等.智能时代的中小学人工智能教育:总体定位与核心内容领域[J].中国远程教育,2021(5):22-31.
[3]李耀贵,刘睿.世界机器人技术发展研究[J].天津科技,2021,48(3):1-3.
[4]柳加文,阴钶鑫,孔令彩,等.一种基于STM32的人形机器人设计[J].中国科技信息,2020(12):92-94.
[5]刘克毅,余斌,王梦,等.基于机械原理的新型机器人教具的设计与研究[J].机电信息,2019(18):110-112.
[6]刘彦伟,黄响,王李梦,等.仿生爪刺式双足爬壁机器人设计与分析[J].机械科学与技术,2019,38(8):1185-1190.
[7]张淼,姚鹏飞.四足机器人的稳定设计与步态控制技术[J].电子技术,2021,50(6):42-43.
[8]韩校粉,孙立明,李志尊.连杆机构在足式机器人行走机构设计中的应用探讨[J].机械设计,2020,37(S1):15-18.
[9]王支荣.混合输入型多足移动机构运动机理和实验研究[D].北京:中国科学技术大学,2015.
[10]林键,秦建军,黄梦雨,等.闭链六杆四足机器人腿部机构研究[J].中国科技论文,2020,15(10):1182-1189.
[11]张楠,吴少振,牛建业,等.四足步行椅机器人位置分析及足端点轨迹规划[J].中国科技论文,2018,13(22):2572-2579.
[12]马跃龙."机械设计基础"课程的创新教学改革探讨[J].科教导刊,2017(6):107-108.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/47622.html