SCI论文(www.lunwensci.com)
摘 要 :无人机技术体系的不断完善改变了传统空中平台的设计思路,而人工智能技术的应用则提高了无人机的智能化水 平。本文以基于人工智能技术的无人机避障系统为研究内容,在简要介绍无人机避障系统架构的情况下,详细论述了基于人工 智能技术的无人机视觉、激光、雷达避障原理,以期能够使人们对无人机智能避障技术有着更加深刻的了解。
Research on Obstacle Avoidance System for UnmannedAerial Vehicles Based onArtificial Intelligence Technology
XU Jian, DAI Fenliang
(Guizhou Industry Polytechnic College, Guiyang Guizhou 550008)
【Abstract】: The continuous improvement of drone technology system has changed the design concept of traditional aerial platforms, while the application of artificial intelligence technology has improved the intelligence level of drones. This article focuses on the obstacle avoidance system of unmanned aerial vehicles (UAVs) based on artificial intelligence technology. After briefly introducing the architecture of the UAV obstacle avoidance system, the principle of UAV obstacle avoidance through visual, acoustic and other sensors is discussed in detail, in order to provide people with a deeper understanding of UAV intelligent obstacle avoidance technology.
【Key words】:artificial intelligence;drones;avoiding obstacles;algorithm;system
随着现代信息技术的日益成熟,以及多类型传感器 在无人机平台上的融合应用,无人机的智能化水平显著 提升,同时无人机在飞行过程中也需要准确避开航线上 的各种障碍物,在此情况下,基于人工智能技术的无人 机避障系统应运而生 [1]。相比较预设航线避障来说,基 于人工智能技术的无人机避障系统可以动态感知周围环 境数据,并根据系统计算结果确定避障机制,如此,不 仅提高了无人机飞行的安全性,也能够提高无人机飞行 效率,从而进一步拓展无人机的应用范围。
1 无人机避障系统介绍
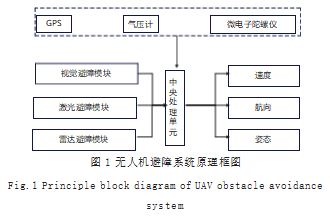
无人机飞行需要相对安全的路线,若飞行路线周围 环境较为复杂的情况下,依托摄像头进行人工控制将 大概率导致无人机发生碰撞。技术人员在增加了包括 GPS、电子陀螺仪、气压计等在内的导航定位模块,从 而实现了对无人机航线的三维数据设定,并增加了视觉、激光、雷达等多种感知模块,与无人机中央处理单 元组成无人机避障系统(如图 1 所示)。在动态获取周 围环境数据的同时,通过无人机中央处理单元可实现相 关数据的快速计算,从而准确定位无人机航线周围环境 的动态变化情况,并在发生碰撞之前向飞控系统发出速度、高度、姿态等控制信号,保证无人机的飞行安全。
基于人工智能技术的无人机避障系统是以传感器为 支撑,利用已有飞行路经优化模型对飞行路径进行动态 更新。相比较人工操作来说,基于人工智能技术的无人 机避障系统。
2 无人机避障系统模块分析
无人机避障行为是以人工智能算法为依据,无人机需 要按照中央处理单元所规定的航线飞行,在飞行过程中, 各类型传感器所获取数据将作为中央处理器是否介入飞 控系统的重要依据 [2]。为保证无人机避障系统决策的正 确性,不仅需要准确的环境数据,还应融合人工智能技 术对其进行逻辑优化。
2.1 视觉避障模块
基于光学传感器的视觉避障模块是衡量无人机智能 化水平的重要依据,目前,无人机主流视觉避障模块采 用的是双目视觉测距,其原因在于该避障模块设计结构 较为简单,在内置数据处理芯片的情况下,可以动态更新 飞行路线环境深度图,为无人机飞行路径优化提供参考。
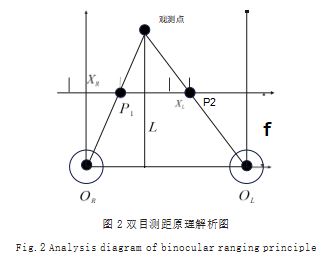
基于双目测距的视觉避障模块是无人机实现智能避 障功能的关键,其算法较为复杂,如图 2 所示,双目摄 像机的光心分别为 OR 和 OL,若选择空间中某点作为被 观测点,则该观测点在双目摄像机的成像点则分别为 P1 和 P2.而观测点与镜头之间的径向距离则可以通过如 式(1)所示的公式进行计算。
其中, f 为双目摄像机的焦距, B 为双目摄像机 OR 和 OL 之间的距离, XR、XL 分别为双目摄像机在 1 倍焦距 上成像的相对坐标(也被称为双目摄像机左右光心视差)。
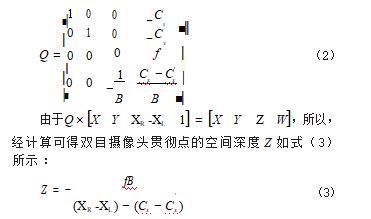
为提高计算精度,则需要获得双目摄像机左右光心 在 1 倍焦距上的视差。为便于计算,假设观测点在左右光心视图中的三维坐标分别为 (X,Y,Z)、(X',Y,Z),已 知观测点在左右光心视图中的二维坐标分别为 (X,Y)、 (X',Y),根据双目摄像头观测点空间测距变换矩阵 Q, 则该观测点的空间深度(或距离) Z 如式(2)所示 :
在获取环境深度信息后,无人机则可以判定规定飞 行路线是否存在被遮挡的可能,再通过人工智能算法对 避障机制进行分析,从而选择最佳避障路径 [3]。但是, 双目测距模块对系统数据处理单元的要求较高,尤其是 复杂环境下的深度信息汇总难度较大,这导致无人机高 速飞行时双目测距模块的可靠性相对偏低。
2.2 激光避障模块
为提高无人机避障系统的空间测算精度,以及基于人 工智能技术的双目测距算法的先天不足, 研究人员在无人 机避障系统中增加了激光避障模块,并通过算法层面的优 化,显著提高了对障碍物的空间测距精度 [4]。激光避障功 能的实现逻辑相对复杂,但其较高的角分辨率使其能够为 无人机提供更加精准的空间信息。目前,无人机激光避障 主要采取了三角测距和飞行时间测距两种方法。
2.2.1 三角测距法
激光避障模块的三角测距法主要应用于水平空间中 观测点的距离探测,激光发射器在进行圆周扫描过程中 将激光打在物体上,经物体反射后由线性光敏元器件接 收。基于激光发射器与观测点之间存在距离,则不同观 测点在线性光敏元器件上的位置也将存在差异,通过三 角公式(4)即可得出观测点与无人机之间的距离。
其中, f 为激光避障模块封装透镜中接收透镜的焦 距, 而 L 则为发射透镜与接收透镜的基线距离,不同 观测点在线性光敏元器件上的偏移量为 d。虽然,三角 测距公式较为简便,但是,该方法不适用于非水平面测 距,其原因在于随着倾角的增加,线性光敏元器件接收 的位置偏移量误差也将随之增加,所以,在无人机大角度机动状态下三角测距法难以提供精准的飞控数据支撑。
2.2.2 飞行时间测距
飞行时间测距(Time of Fly,TOF) 的原理是利 用光的高速传播特性,通过点脉冲信号控制激光发射器 发出激光,经由物体反射至光敏元器件,利用激光在空 间飞行的时间和速度计算观测点与无人机之间的距离。 由于光的飞行速度极快,因此,飞行时间无人机位置的 移动可以忽略不计,在控制激光发射器功率的情况下, 其理论探测距离可以达到几百米,能够为大多数低速无 人机提供高精度的环境信息。
飞行时间测距需要综合考虑两个重要因素,首先, 控制激光发射器工作的脉冲信号维持时间应以纳秒为单 位 ;其次,为提高飞行时间测距的可靠性,在系统设计 中需要通过软件对激光信号的频率、脉宽、幅值、波长 等信息进行调制,如此,则可以避免被其他激光信号干 扰 ;最后,飞行时间测距传感器价格相对较高,目前, 大多数民用 TOF 传感器的有效距离多为 3m 左右,因 此,在无人机高速飞行的情况下,飞行时间测距模块同 样无法保证其安全性。
2.3 雷达避障模块
随着无人机飞行速度、高度的不断增加以及在日益 复杂的飞行环境下,提供全方位的避障管理逻辑对无人 机飞行安全显得尤为重要。基于视觉避障模块、激光避 障模块在技术上的局限性,无人机雷达避障模块多采用 超声波实现,通过优化底层算法,可以实现无人机对周 围环境的精准测量,因此,雷达避障模块成为大多数智 能无人机的标配 [5]。
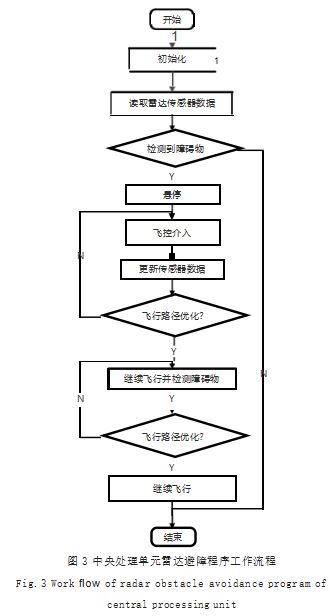
为实现无人机智能避障,无人机中央处理单元内置 了雷达数据处理程序,其流程如图 3 所示。
首先,无人机启动后需要对雷达避障模块进行初始 化,主要包括频率合成器、定时器、终端控制寄存器等 工作参数的调整 ;其次,软件控制脉冲电路发出脉冲信 号激活雷达避障模块 ;然后,软件获取不同方位的雷达 回波数据,通过对离散信号的处理,形成空间三维图 谱,从而完成最新飞行路径规划 ;最后,计算当前情况 下变更无人机飞行路径所需要的参量,向无人机飞控系 统发出指令, 并与 GPS、微电子陀螺仪等进行数据拟 合,从而保证与最新飞行路径的一致性。
3 结语
基于人工智能技术的无人机避障系统是以多功能传 感器为支撑,通过不同方式获取外部环境数据,中央处 理单元将在后台对以上数据进行综合处理,并根据不同 避碰模块的优先级确定最佳飞行路径。随着人工智能技术的不断进步以及复合传感器在无人机领域的应用,无 人机避障系统的智能化水平将得到显著提升。
参考文献
[1] 董振鹏,龙飞虎,周德旭.机器视觉在无人机智能避障的应用 方法研究[J].新型工业化,2021.11(3):12-13.
[2] 李安醍,武丁杰,李诚龙.低空无人机自主避障算法综述[J].电 光与控制,2021.28(8):59-64.
[3] 张乐,袁锁中,黄永康.连续障碍环境下无人机实时避障控制 [J].电光与控制,2020.27(4):6-10+14.
[4] 胡多修,董文瀚,解武杰.无人机自主引导跟踪与避障的近端 策略优化[J].北京航空航天大学学报,2023.49(1):195-205.
[5] 查勇.无人机编队避障与控制技术研究现状及发展趋势[J]. 中国设备工程,2021(6):188-189.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/74016.html