



摘 要:尽管 SLAM 在过去的数年受到研究者们的广泛关注和投入,但仍有一些难题还未解决。特别是在大的动态的环 境中,随着地图的持续增加,在保持可行的计算复杂度前提下,最小化全局偏移以及对闭环的高效侦测已经成为当前的研究 热点。
关键词:局部地图构建 ;环路融合 ;视觉 ;优化
1 研究意义
同步定位与地图构建实现在未知的环境中持续实时 的估计机器人位置和方向。在通过视觉传感器增量构建 环境地图的同时,周期地估计机器人在此地图中的位 置。SLAM 系统是自主机器人的关键部件,也是在未知 环境中实现导航的必不可少的组成部分。
在视觉 SLAM 系统中,环境地图通常由一些地标 表示,比如在图像上对应三位空间中可被识别和定位的 一些点。基于图像中这些关键点的位置信息,可以估计 出相机的位置。随着相机对新的环境场景的录入,新的地标也被标识并加入到地图中,同时这些新的地标又可 被用来估计新的相机位置。

局部地图构建中只考虑局部环境中的关联关系,即 局部多个关键帧间的匹配关系。在局部窗口可能是最优 的,但因没有考虑全局环境,必然会有些误差。随着相机的持续运动,误差持续累积,无法创建一个与预期一 致的轨迹和地图。
环路侦测的引入,使得一些时隔很远的关键帧之间 出现约束关系。比如相机经过同一个地方,采集到了相 似的数据。如果侦测到相同场景,将可把带有累积误差 的轨迹修正优化到正确的位置。
环路闭合对于 SLAM 系统意义非常大。它关系到 估计的轨迹和地图在长时间下的正确性。另一方面,由 于回环检测中当前数据与所有历史数据存在关联,因此 即使跟踪丢失,还可以用环路侦测进行重新定位。所以,环路闭合的存在提高了整个 SLAM 系统的精度和 稳定性。
2 关键技术
2.1 词袋模型
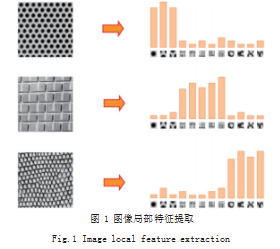
随着近年来图像数据的井喷式增长,如何利用计算设备对图像进行分析和理解,成为研究热点。图像场景 识别和分类就是其中首当其冲的重要问题。针对这个问 题,研究者们提出了很多方法来解决,例如王涛等人 提出的基于颜色 - 空间特征的图像检索法 [1]。而将图像 的局部不变特征聚类为一组视觉词汇并用词袋(Bag of Words)模型来表示是近年研究场景识别和分类的热门 方向。词袋模型用作图像表示模型,需要将二维的图像 信息映射成关键词集合,这样既保存了图像的局部特征又有效地压缩了图像的描述,如图 1 所示。
2.2 视觉字典
字典由很多字组成,每一个字描述了一个概念。这 里的字并不简单的表述某个图片中某个局部特征,它是 由大量图像集中提炼出来,表述比较通用的概念,就像 普通字典中一个字可以用到不同的句子中亦或不同的文 章中。这种提炼可以通过聚类的方法来实现。
视觉词袋模型在从训练图像集的图片中提取低级特 征后,需要使用一种无监督的算法,如 K 均值法,对这 些低级别特征进行给定聚类中心数目的聚类。假设给定 一组观测值序列 X={x1.x2.… ,xn},每个观测值为 d 维的 实值向量。K 均值聚类的目标是划分这 n 个观测值到 k 个序列里 S={S1.S2.… ,Sk}(k<n),
其中 mi 是 Si 的均值,即聚类中心。
通过 K 均值,可以把已经提取的大量特征聚类成一 个含有 k 个字的字典。接下来的要解决的问题是如何根 据图像中的某个特征点查找字典中相应的字。比较简单 的方法是和每个字进行比对,取最相似的那个。然而, 字典为了通用性,都相当庞大,比如 ORB-SLAM 使用 的字典有几百兆字节的信息量,因此计算量太过庞大,无法实现实时计算。
快速查找的问题在数据结构的论述里早有成熟的方 案。比如字典排序,然后采用二分法查找。实际应用, 还会更加复杂,以提升查找速度,这里不作详述。
3 候选环路侦测
首先计算 Ki 的词袋向量和 Ki 在协同可是图中所有 邻居间的相似度并保留最低得分 smin。然后查询识别数 据库并丢弃得分低于 smin 的所有关键帧。额外地,所有与 Ki 连接的关键帧的结果都会被丢弃。只有被侦测到 连续(在协同可视图中连接的关键帧)三个候选环路才 能被认定为真正的候选环路。如果有多个地方与 Ki 相 似,将存在多个候选环路。
4 计算相似变换阵
单目 SLAM 有 7 个自由度 :三个平移、三个旋转 和一个尺度因子。因此为了闭合环路,需要计算从当前 关键帧 Ki 到环路关键帧 Kl 的相似变换,以获得环路上 的累计误差。相似变换的计算也可作为环路的几何验证。
首先计算当前关键帧地图云点 ORB 特征与候选环 路关键帧的对应,此时,每个候选环路有了 3D 到 3D 的对应。然后对每个候选环路执行 RANSAC 迭代,通 过 Horn 方法尝试找到相似变换阵。如果找到存在足够 有效值的相似变换阵 Sil。先优化,再用其引导搜寻更 多的对应。然后再优化它,如果有充足的有效值来支撑 Sil,该候选环路 Kl 将被接纳。
5 环路融合
环路纠正的第一步是融合重复的地图云点并在协同 可视图中插入新的边以使环路能够连到一起而实现闭 合。首先,使用相似变换 Sil 纠正当前关键帧位姿 Tiw, 然后将这种纠正方法延伸到 Ki 所有的邻居关键帧上, 最终实现环路两边对齐。这个候选环路关键帧及其邻居 关键帧上能够看到的所有地图云点全部投影到当前关键 帧 Ki 上并在投影点周围较窄的范围里寻找匹配和邻居。 将所有匹配和相似变换 Sil 计算的有效值进行融合。涉 及融合的所有关键帧都将更新其在协同可视图里的边并 创建新边将环路两侧连接起来。
6 本征图优化

为了矫正环路,通过姿态图优化,将环路闭合误差沿着图的轨迹进行分散处理。为了计算简单,使用本征 图来代替协同可视图,如图 2 所示。本征图包含协同可 视图中的所有节点,但边的数量大幅缩减。因为关键帧 之间的关键信息得以保留,所以结果依然很精准。从第 一个关键帧开始,系统持续构建一个生长树,如图 2(d), 该生长树是协同可视图的子图,提供最少的边,但依然保持相同的连接关系。当一个新的关键帧插入时,它被加入到该生长树,并将其链接到与之共享地图云点树最多的那个关键帧上。当一个关键帧被剔除机制移除时,系统会更新与该关键帧有关系的链接。本征图包含生长树、在协同可视图中具有较高权值(θmin=150) 的边以及闭合环路的边,这些足以组成一个很强的相机姿态网。从实验结果可以看出,这个解决方案结果已经很精 准了,以致后续的全局光束平差优化很难在提升精度。
参考文献
[1] 王涛,胡事民,孙家广.基于颜色-空间特征的图像检索[J].软 件学报,2002(10):2031-2036.

可解释性是一个非常重要的标准。机器学习模型... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
