



摘 要 :探讨了扫地机器人导航系统中基于多传感器的避障问题。通过设计一套多传感器避障方案,结合多传感器数据融 合算法、避障路径规划算法,并考虑其他潜在影响因素,实现扫地机器人导航系统性能。
1 引言
1.1 研究背景
扫地机器人是一种常见的家居智能设备,通常被用 于自动完成室内的清扫任务。为了能安全地躲避障碍 物,扫地机器人需要对周围环境进行精确的感知,并规 划出合适的避障路径。从传感器角度考虑,红外线传感 器易受环境干扰,超声波的测距精度有限,激光传感器 成本较高, 双目视觉需要消耗大量的计算资源 [1]。针对 上述问题,有效的解决方案是采用深度摄像头作为外部 传感器进行扫地机器人的避障研究,提高机器人在室内 环境中的避障能力。这项研究具有重要的理论和实践价 值,将推动移动机器人技术的发展,并提升智能家居设 备的性能。
1.2 研究内容
本文研究基于多传感器的扫地机器人导航系统避障 问题。通过融合多种不同传感器的信息实现室内环境中 精确定位和导航,分析扫地机器人导航系统的避障需求, 重点研究基于多传感器的避障算法,通过对多传感器数据进行融合和处理,实现扫地机器人的避障功能。通过 在实际环境中搭建扫地机器人导航系统,并运行设计的 避障算法,对算法的性能进行实验验证。通过对比实验 结果,评估所提算法的准确性和可行性。
2 多传感器导航系统介绍
2.1 多传感器的种类与特点
多传感器在扫地机器人导航系统中扮演着核心角色。 通过采集多样化的环境信息,多传感器的融合可以显著提 升机器人的导航性能。视觉传感器是通过采集环境图像信 息实现对环境的感知,同时可以获取物体的位置和姿态 信息。激光雷达传感器通过发射激光束并记录其被目标 物体反射的时间和强度来获取目标物体的距离和形状信 息。还有其他一些传感器,如距离传感器和惯性测量单元 (Inertial Measurement Unit,简称 IMU),在机器人 导航中发挥着重要作用。距离传感器通过测量物体与机 器人之间的距离获取环境信息,常见的有超声波传感器 和红外线传感器 [2]。惯性测量单元则可以通过测量机器 人的加速度和角速度获取机器人的运动状态信息,对于机器人的姿态估计和运动控制具有重要意义。
综上所述,多传感器的种类和特点各异, 在扫地机 器人导航系统中互为补充。
2.2 多传感器的融合策略
多传感器融合将不同传感器提供的信息进行整合和 处理,从而获得更准确、可靠的环境感知结果。
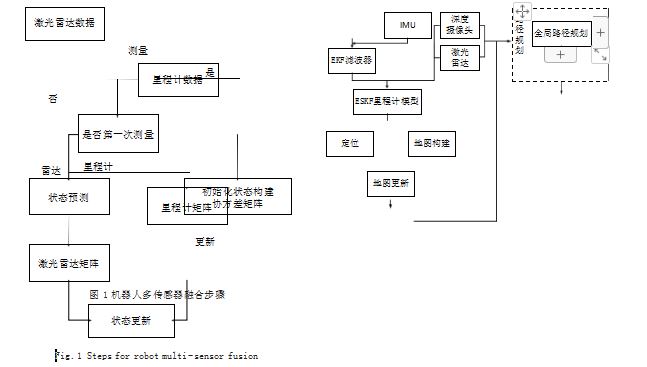
视觉传感器通过摄像头捕捉环境中的图像信息,识别颜色、形状、纹理等特征,从而提供丰富的环境信息。 激光雷达能够测量出扫地机器人周围环境的距离和方向 等信息 [3]。激光雷达发射激光束并接收反射回来的光信 号,通过对信号的分析和处理,得出环境的几何结构和 障碍物的位置。超声波传感器通过发射和接收超声波信 号测量物体与扫地机器人的距离 [4]。针对多传感器的数 据融合是将不同传感器的数据进行整合,通过误差状 态卡尔曼滤波器、校正和融合算法等手段,提高感知结 果的准确性和稳定性。机器人多传感器融合步骤如图 1 所示。
3 扫地机器人导航系统的避障需求
3.1 扫地机器人的工作环境分析
在进行扫地机器人导航系统的避障研究之前,需要 对其工作环境进行详细的分析。扫地机器人主要用于清 扫室内空间,如家庭、办公室、商店等,其工作环境多 为封闭的室内环境。室内环境与室外环境相比,具有一 定的特点和限制性因素。综合考虑障碍物形状和位置、 地形特征识别、照明情况适应等因素,设计一种基于多 传感器的避障方案,以提高扫地机器人的导航能力和避障性能。
3.2 多传感器避障方案设计
为了实现扫地机器人的高效导航和避障能力,本研 究方案结合了视觉传感器分析图像中的颜色、纹理和形 状等特征,识别出可能存在的障碍物。激光传感器通过 发射激光束,可以获得障碍物的距离和高度等信息。利 用激光扫描的数据,可以生成环境的地图,然后通过与 地图进行比对,判断扫地机器人是否会与障碍物发生碰 撞。超声波传感器发射超声波信号,并通过接收回波信 号计算与障碍物之间的距离。通过设置合适的阈值,实 现机器人对于近距离障碍物的有效检测和避让。
综合利用不同传感器的特点和信息,可以实现对复 杂环境中障碍物的准确检测和有效避让。基于多传感器 的地图构建和移动机器人导航方案避障设计如图 2 所示。
4 基于多传感器的避障算法研究
4.1 多传感器数据融合算法
多传感器数据融合是一种将来自不同传感器的数据 进行集成和处理的技术,迭代卡尔曼滤波器克服扩展卡 尔曼滤波线性化过程中对高阶的舍弃而造成的估计不准 确问题 [5]。“迭代”主要是指在量测更新过程中添加了 一步迭代,直到状态收敛。唯一的区别在于卡尔曼滤波 针对的是物体的运动状态,而误差状态卡尔曼滤波针对 的是物体运动状态的误差状态。迭代卡尔曼滤波将更新 问题变成优化问题。其中,涉及点的姿态变换。可以发现, 这个变换为将点Pilk+1 转变为Pi ,涉及的变换信息有两种, Rl(b) 和 Pl(b) 为雷达和 IMU 的姿态变换、 Rbk(bk)+1 和Pbk(b)1为帧 bk+1 和 bk 之间的姿态变换,如式(1)所示 :

其中,Δt=tt-tt-1. tt 和 tt-1 是 IMU 的时间戳, Q 是 w 的协方差矩阵。这里只是借用误差状态向量 δx 的递推 公式, 其中, ESKF 的卡尔曼增益方程和状态更新方程 如式(2)所示 :
其中, Hk,j 是f ( − xbk(bk)+1 田δx) 的雅可比矩阵。对问题进行优化求解。在每次迭代中,都会找到新的匹配边和匹 配面,进一步最小化度量误差,然后计算新的Hk,j, Jk,j 和 Kk,j。这就是迭代的卡尔曼滤波和常规的卡尔曼滤波 的区别之处。当迭代终止的时候,假定终止下标为 n, 可以算出协方差更新方程,如式(3)所示 :
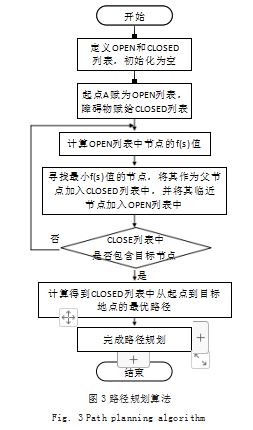
这样,就可以进行迭代卡尔曼滤波的下一次迭代计 算。其中式 (1)、式 (2)、式 (3) 就是 ESKF 的五个方程组。 4.2 避障路径规划算法在决策算法中,基于融合后的数据和路径规划结 果,做出实时的避障决策。这些决策包括调整机器人的速度、方向和避让动作等,以避免与障碍物碰撞 [6]。决 策算法需要考虑到机器人和环境的动态变化,路径规划 算法流程如图 3 所示。通过实时的决策,机器人可以快 速响应环境变化,保持安全性和高效性。

扫地机器人导航是机器人利用传感器获取环境信息 后,实现按照规避障碍物且移动路径最优的要求自主移 动,最终到达指定目标点的过程。A* 算法是在 Dijkstra 算法框架基础上结合贪心算法实现的一种路径规划方 法。该算法搜索节点时,定义了一个启发函数 h(n), 该 函数给出每个节点从该节点到目标点的最小代价的估 值。采用不同的启发函数的 A* 算法效果不同,也就形 成了很多种在 A* 算法基础上改进的算法。当 h(n)=0 时, A* 退化成 Dijkstra 算法。总的来说, A* 算法搜索 效率高于 Dijkstra 算法,因此,使用 A* 算法作为全局 路径规划算法。A* 算法的伪代码如表 1 所示。
在伪代码中, g(n) 表示当前对从起始状态到节点 n 的累计代价的最佳估计, h(n) 表示从节点 n 到目标状态 的估计最低代价(即目标代价),从开始状态到目标状 态通过节点 n 的估计代价最少是f(n)=g(n)+h(n),路径 搜索策略是 :以最小的代价f(n)=g(n)+h(n) 扩展节点, 更新节点 n 的所有未扩展邻居 m 的累积成本 g(m), 从开 始状态开始,已扩展的节点的成本保证最低。Cnm 表示 当前节点 n 与邻居节点 m 间边的代价,本文的代码采用 网格坐标的欧式距离计算。局部路径规划算法利用当前 环境信息,结合全局路径完成避障和运动控制 [7]。

4.3 算法效能评估与优化
在本研究中,通过实验对基于多传感器的扫地机器 人导航系统的避障算法进行了效能评估与优化。并对经过改进和优化后的算法进行了实验评估。多传感器融合 移动机器人导航误差结果如表 2 所示,可以看出,改 进后的算法在各种不同场景下都表现出了更好的避障性 能。其避障成功率有所提高,并且在避障速度和路径准 确性方面也获得了显著的提高。
各传感器优势互补,提高导航的精度。先通过 Kitti 数据集进行研究,以实验室实测数据作为支撑进行测试, 规划出整体轨迹误差如图 4 所示,验证导航的精确性和 效率。
从实验数据来看,针对扫地机器人的路径规划如图 4(a) 和图 4(b) 所示, 图 4(a) 为单传感器工作效果图, 方向单一,图 4(b) 为多传感器的协同工作效果图,融 合不同传感器在低纹理环境下和特征丰富环境下扫地机 器人的导航误差越来越小 , 构建出的地图比较准确,如 图 4(c) 和图 4(d) 所示,在导航过程中,从同一起点出 发,碰见障碍物,它们处理的效果、决策能力,在误差 控制范围内,扫地机器人的导航效果越来越准确。
5 实验与验证
5.1 实验环境与设备
为了验证多传感器扫地机器人导航系统的避障性 能,搭建了一个模拟家庭室内场景的实验环境,设计了 不同形状和大小的障碍物,模拟实际情况下扫地机器人 导航时可能遇到的各种挑战。
在实验中,将多个传感器安装在扫地机器人的底盘 上,通过激光雷达传感器获取环境的地图信息,并将其 与摄像头捕获的图像数据进行融合。同时,超声波传感 器负责检测机器人前方和周围的障碍物。所有传感器获 取的数据将被传输到机器人的控制系统,从而实现智能 的避障功能。基于传感器定位的机器人控制系统示意图 如图 5 所示。
除了传感器,还选用一台高性能的电脑作为实验设 备,用于控制扫地机器人并处理传感器数据。该电脑配 备了强大的处理器和大容量内存,以满足实时导航系统 的计算需求。为了验证多传感器扫地机器人导航系统的 避障性能,合理设计了实验环境,并选用多种传感器和 高性能电脑作为实验设备。

5.2 数据处理与结果分析
从多个传感器中获取了大量的数据,对这些数据进 行预处理,包括去噪、滤波等操作 [8],以消除数据中的 随机误差和噪声。对处理后的数据进行特征提取和数据 分析。针对不同传感器提供的数据,设计相应的特征提 取方法。在得到特征之后,将其与机器人的运动状态进 行关联,以进一步分析数据。利用统计分析的方法, 构 建了相关模型,对数据进行建模和预测。根据数据处理 和结果分析的结果, 对扫地机器人导航系统避障的性能进 行评估和验证。通过与人工标注的正确路径进行比较, 评 估系统的准确性和可靠性。此外,还对系统的实时性和 稳定性进行了测试,并得到了相应的结果和结论。基于单一传感器和多传感器路径规划比较如图 6 所示。

从图 6 得知,单一传感器在路径规划上具有单向性, 多传感器在选择路径上具有可选择性,从同一个出发点 出发,多传感器在临界点会做出判断,提高扫地机器人 的导航避障效率。
6 结语
本研究以基于多传感器的扫地机器人导航系统避障 为主题,进行深入的实验研究和分析。通过对传感器选 择与配置、数据融合与处理、路径规划算法和导航控制 系统的优化与改进,成功地提高了机器人的导航精度和 稳定性,使其在复杂环境下能够更加有效地避障导航。 在本研究中仍存在一些不足之处, 虽然能够通过多传感器获取丰富的环境信息,但在遇到复杂、动态的障碍物时, 仍然存在一定的识别和定位误差。未来的研究方向包括 提高传感器的精确度,完善数据融合算法,改进避障策 略,引入新的传感器和技术,以实现更高水平的导航性能。
参考文献
[1] 王大方.基于深度强化学习的机器人导航研究[D].北京:中国 矿业大学,2019.
[2] 袁茂鸿,王姝,林心如.基于超声波传感器的扫地机器人避障 技术研究[J].南方农机,2021,52(10):100-101.
[3] 杨建峰.基于多传感器的自动洗地清洁机器人的研究[D].南 京:南京农业大学,2019.
[4] 陈旭凤,赵彦伟,胡雪花,等.基于多传感器融合的服务机器人 避障系统[J].科技风,2023(11):7-9.
[5] 郑道岭.基于多传感器的移动机器人地图构建方法研究[D]. 南宁:广西大学,2019.
[6] 沈梦珠.基于回溯法的扫地机器人全区域覆盖规划算法研究 [D].武汉:华中科技大学,2018.
[7] 朱佳文.基于视觉的机器人室内定位与导航方法研究[D].大 连:大连理工大学,2020.
[8] 叶嘉永.基于3D ToF的扫地机器人低矮障碍物识别与避障 [D].广州:华南理工大学,2023.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!

可解释性是一个非常重要的标准。机器学习模型... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
