SCI论文(www.lunwensci.com):
摘要:为了满足物联网无线通信低能耗、远距离传输的要求,提出了基于无人机协作的物联网无线通信能耗控制方法。对该类物联网无线通信进行系统建模;对通信节点信号进行映射,获取通信节点对应的物理坐标位置,并求解全局网络非线性问题;利用通信节点能耗控制算法选择对应簇首节点,以此节点为基础设置能量消耗控制区,并抽取相应的节点数据,建立无人机能量回传节点集合,分析能耗控制区域的能量回传节点,完成物联网无线通信能耗控制。最后通过实验验证了所提方法的有效性。
关键词:无人机协作;物联网;通信能耗;无线通信;回传节点
Energy Consumption Control Method of Wireless Communication in Internet of Things Based on UAV Cooperation
XIAO Songquan
(Liaoning Post and Telecommunications Planning and Design Institute Co.,Ltd.,Shenyang Liaoning 110179)
【Abstract】:In order to meet the requirements of low energy consumption and long-distance transmission of wireless communication in the Internet of Things,an energy consumption control method of wireless communication in the Internet of Things based on UAV cooperation is proposed.Modeling the wireless Internet of Things communication system;Mapping the signals of communication nodes,obtaining the corresponding physical coordinate positions of communication nodes,and solving the global network nonlinear problem;Select the corresponding cluster head node by using the communication node energy consumption control algorithm,set the energy consumption control area based on this node,extract the corresponding node data,establish the UAV energy return node set,analyze the energy return nodes in the energy consumption control area,and complete the energy consumption control of the Internet of Things wireless communication.Finally,the effectiveness of the proposed method is verified by experiments.
【Key words】:UAV cooperation;Internet of Things;communication energy consumption;wireless communication;return node
0引言
无人机是物联网无线通信的空中接口,它能够有效地克服在能源有限情况下,在物联网无线通信领域中实现远程通讯的问题[1]。通过无人机在大规模物联网无线通信装置的上空进行采集,可以为非接触式无线通讯装置的提供通信资料。在这种大规模的大规模物联网无线通信中,利用无人机进行信息的收集,构成了一种新型的网络中间层[2]。在确保安全、有效的通讯条件下,如何有效地利用不同方法来降低大规模物联网无线通信能耗,以达到延长网络的生存周期的目的,是值得研究的课题。文献[3]提出了近地面空间应急物联网空地节点动态协同部署方法,以通信能耗和移动能耗为约束条件构建无人机路径规划函数,根据Gerschgorin圆盘定理求解得到最佳节点动态协同部署方案。然而,该方法没有考虑到通信过程中的物联网无线通信节点的能耗,从而使关键节点失去了其应有的功能,增加了物联网无线通信能耗。
为了实现物联网无线通信能耗控制,提出了基于无人机协作的物联网无线通信能耗控制方法,该方法通过建立UAV无人驾驶飞机(Unmanned Aerial Vehicle)的物联网无线通信能耗模型,在此基础上通过节点分簇实现了物联网无线通信能耗控制。
1基于UAV构建无线通信能耗模型
基于UAV构建无线通信能耗模型以UAV为移动基地,在无人机协作网络区域中移动[4],在此范围之内,由各无人机协同工作获得的数据由移动基地传送至监控中心。在建立的模型中,根据已知的信号空间和物理空间数据[5],将无人机协作所采集到的信号分成两组,其中,m个已知节点的信号强度可以用Q=[q1,q2,…,qm]来表示,而对应于各个信号节点矢量的物理坐标可以用ω(0,0)来表示。
在物联网无线通信能耗模型前,本文采用典型关联分析(Canonical CorrelationAnalysis,CCA)对信号空间数据和物理空间数据进行映射。该算法的其主要原理是对
取得对应两组基向量进行表示,即kQ∈Lq、kw∈Lp。对于映射后的数据表示为 其中,q和w表示样本均值使转换后数据间的关联性达到最大。通过CCA方法进行计算:
其中,q和w表示样本均值使转换后数据间的关联性达到最大。通过CCA方法进行计算:
根据公式(1)的计算结果,对映射后的数据

和

进行变换,此时获取的数据间的关联性达
到最大。
在确定数据间关联性的基础上,对物联网无线通信网
分别描述拓扑结构在信号空间与实体空间的相似度,公式中的矩阵元素X或Xwij可以由下列公式获得:络中的近邻节点定义后,利用
式中,tQ和tw的取值范围为信号空间的平均距离。由于该矩阵元素是由无人机协同节点的布局决定的,因此在物联网无线通信网络拓扑发生改变时,该矩阵元素也会发生相应的改变。
将全局网络非线性问题划分成m个局部线性子问题,并对其进行求解,得到结果的集合是所有的非线性问题的总和,最终的计算公式由CCA法得到:
利用上述公式将信号空间映射到物理空间,将数据映射和信号空间映射到物理空间,从而建立物联网无线通信能耗控制模型。
2实现通信节点能耗控制
在构建物联网无线通信能耗模型的基础上,设计基于无人机协作的通信节点能耗控制方法。
2.1簇首节点选择
假定物联网无线通信网络中的节点,在M×M的范围内随机分布,每一个节点都有自己的识别标志,并且在此基础上,各节点之间的能耗也是有限的。在正常工作状态下,无线通信网络的传输能耗是有代价的,但由于路由协议与传输能耗的相关性,通过传输、接收、等方式来产生,所以根据物联网无线通信能耗模型可知,除了接收和发送的能耗之外,也会有一些能耗来自放大器,这与传输距离有着很强的相关性。当发射放大器在发射距离l比给定发射距离l0小时,其自由能耗与发射功率有关;在发射距离l大于给定发射距离l0时,发射放大器与多路径能量消耗衰减定律有关。所以,在物联网无线通信要求传送wbits数据时,发送者的能耗值是:
式中:h表示传输路径;E1、E2分别表示发送和传输产生的能耗;λ1、λ2分别表示不同的能耗传输规律。因为发送者和接收者是不同的,所以发射距离l和接收者的能耗没有相关性。而给定的传输距离l0是分析能耗传输规律λ1、λ2的重要指标,其计算公式为:

根据上述分析,得出接收hbits数据时,物联网无线通信网络需要消耗的传输传输能耗的表达式为:
通过对以上计算,得出了物联网无线通信网络在接收和发送数据时的能耗。比较各节点的剩余能耗与平均能耗,如果各节点的剩余能耗大于平均能耗,那么将该节点划分为簇首节点的候选节点,并用CH_G来表示候选簇首节点集。在候选节点集合中,各节点生成的随机数各不相同,当随机数超过阈值时,将其作为簇首。将该阈值定义为E(w),其数值范围如下:
式中,p用来表示簇头数目与总节点数目的比率,r用来表示传输次数,CH_G用来表示1/p次候选簇头的集合,g用来表示候选节点集合[6,7]
2.2确定无人机数据回传节点集
为了精确地定位到无人机回传生成信息的节点,并了解其位置,设定前置能耗控制区域,如图1所示。
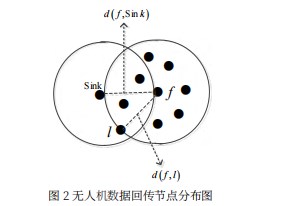
图1中,簇首节点f为圆心,G(f)为每个簇首节点的前置能耗控制区域,l为与簇首节点距离最近节点的欧式距离集合中节点,和距离簇首节点最远的节点之间的距离。以图1所示的前置能耗控制区域为基础,对无人机数据回传节点的具体路由行为进行分析。无人机数据回传节点分布如图2所示:
设C(f)表示每个簇首节点f所对应无人机数据回传节点集合,当d(f,l)<d(f,Sin k)时,其中,d为不同节点之间的距离。C(f)内所有节点均为正常节点;当d(f,l)=d(f,Sin k)时,则C(f)=∅,此时所有的正常节点会把数据传输到簇首节点中;当d(f,l)>d(f,Sin k)时,此时所有的正常节点会把数据传输给Sink节点。
2.3无人机数据回传节点集计算节点能耗
结合最终确定的前置能耗控制区域和C(f)中的节点位置,计算无人机数据回传节点能耗:
式中,Tf(l)用于表示附属簇首节点集合。根据公式(8)的计算结果,完成前置能耗控制区域中无人机数据回传节点能耗的计算,实现对通信节点能耗控制。
3实验与分析
为了验证本文提出的基于无人机协作的物联网无线通信能耗控制方法的合理性,在MATLAB平台上设计以下对比实验。
3.1实验环境与参数设置
此次实验计算环境为Intel(R)Core(TM)i9-6700,CPU运行速度为8.6GHz,内存16GB。选择通信节点覆盖面积为3000m×3000m,参数设置如表1所示。
3.2实验结果与分析
在表1设置的参数支持下,分别采用文献[3]基于旋翼无人机近地面空间应急物联网节点动态协同部署方法和所研究方法的性能进行对比分析,RBP指标描述了系统主机在单位时间内所具备的能耗电子量协调能力,根据惯有应用经验来判断,RBP指标数值越大,系统主机在单位时间内所具备的能耗电子量协调能力也就越强,具体实验结果如表2所示。
分析表2中数据可知,实验组RBP指标在前两个单位时长内呈现连续上升的数值变化趋势,而在每一个单位时长中,数值保持不变,从第三个单位时长开始,这种上升变化趋势得到了明显促进,且平均上升量也开始逐渐增大,整个实验过程中的最大数值结果达到74.43%。对照组RBP指标在四个单位时长内,除第三个单位时长外,数值处于增长状态,最大数值结果达到71.03%。
通过上述分析结果可知,使用提出的基于无人机协作的物联网无线通信能耗控制方法,能耗控制性能更好。
4结语
UAV与物联网无线通信技术相融合,可以快速地进行数据的收集与分配,使数据的传送速度大大加快。本文以无人机协作为基础,建立了一个物联网无线通信能耗模型,并通过设计通信节点能耗控制方法,实现了低能耗的物联网无线通信数据传输。在未来UAV与物联网无线通信技术的不断革新过程中,所提方法也应该与时俱进,以提高方法的适应力,扩大传播范围。
参考文献
[1]杨鼎成,刘伟东,肖霖,等.基于无人机的区域环境监测物联网系统[J].现代电子技术,2019,42(1):19-23.
[2]王巍,赵继军,彭力,等.基于UAV的移动物联网远距离通信节能策略研究[J].电子学报,2018,46(12):2914-2922.
[3]王巍,彭力,赵继军,等.基于旋翼无人机近地面空间应急物联网节点动态协同部署[J].自动化学报,2021,47(8):2002-2015.
[4]易丹.基于物联网架构的植保无人机通信系统设计[J].农机化研究,2020,42(11):215-218+223.
[5]付澍,杨祥月,张海君,等.物联网数据收集中无人机路径智能规划[J].通信学报,2021,42(2):124-133.
[6]东方,吴媚,朱文捷,等.物联网环境下面向能耗优化的无人机飞行规划[J].东南大学学报(自然科学版),2020,50(3):555-562.
[7]何建华,赵辉,徐晓斌,等.基于改进双层LT码的天基物联网数据收集方法[J].北京邮电大学学报,2020,43(6):118-125.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/41903.html