SCI论文(www.lunwensci.com)
摘 要 :无论高等院校的师生还是智能工厂的数字化工程师,在利用软件 Process Simulate 完成机器人工作站的虚实联 调时往往会消耗大量的时间,结果还不理想,因为其用到的方法是传统的创建多个机器人子程序,或是创建一个机器人程序在 程序中用到大量的等待信号去完成物理属性的机器人工作站与软件内机器人工作站的数字孪生同步运行,此方法能够实现物理 属性的机器人工作站与软件内机器人工作站的同步运行即虚实联调,但是效率低同时对项目实施者要求也非常高,因此利用传 统的方法完成机器人工作站的虚实联调会困难重重,效果还不理想。为了节省数字孪生项目中机器人工作站与软件间的虚实联 调的完成时间和降低项目完成难度,作者通过在数字孪生实验室的大量实验研究,最终通过在真实机器人控制器中编写机器人 程序读取机器人各轴位置数据,借助 Profinet 通讯完成机器人与 PS 软件间的实时位置数据交互,进而较快地完成虚实联调项 目。通过与传统的方法做对比测试,作者创建的方法使项目完成的效率得到显著提高,同时降低了项目完成难度。基于以上对 比测试,作者研究的方法在以后数字孪生项目中会得到很好地推广,并慢慢会取代传统的方法。
Research on VirtualRealJointDebuggingbetweenABBRobots and Process Simulate
CUI Jiuhao
(Shandong Rhein-Koster Intelligent Technology Co.,Ltd, Digital R&D Department, Zibo Shandong 255000)
【Abstract】:Both teachers and students in higher education institutions and digital engineers in intelligent factories often consume a lot of time when using the software Process Simulate to complete virtual and real debugging of robot workstations, and the results are not ideal because the traditional method used is to create multiple robot subprograms, or create a robot program that uses a large number of waiting signals to complete the digital twin operation of the physical attribute robot workstation and the software's robot workstation. This method can achieve synchronous operation of the physical attribute robot workstation and the software's robot workstation, that is, virtual real debugging. However, the efficiency is low and the requirements for project implementers are also very high. Therefore, using traditional methods to complete virtual real joint debugging of robot workstations will be difficult and the effect is not ideal. In order to save the completion time of virtual and real debugging between robot workstations and software in the digital twin project and reduce the difficulty of project completion, the author conducted extensive experimental research in the digital twin laboratory. Finally, by writing a robot program in a real robot controller to read the position data of each axis of the robot and human, the real-time position data interaction between the robot and PS software was completed using Profinet communication, and then quickly complete the virtual and real joint debugging project. Through comparative testing with traditional methods, the method created by the author significantly improves the efficiency of project completion while reducing the difficulty of project completion. Based on the above comparative tests, the method researched by the author will be well promoted in future digital twin projects and will gradually replace traditional methods.
【Key words】:digital twins;virtual and real joint debugging;ABB robots;Process Simulate、
0 引言
生产设备的虚拟调试 / 虚实联调解决方案,是数字 孪生技术的典型应用场景, 借助 Process Simulate 软 件和西门子博途软件可将设备的机械、自动化、电气系 统的仿真技术结合,打造智能生产线的数字孪生体 [1], 实现在虚拟环境中对智能设备进行全方位的仿真和监 控,助力企业缩短设计和调试周期,降低人力、物力的 损耗和浪费 [2],提升质量和灵活性。现以 ABB 机器人 工作站与 Process Simulate 之间的虚实联调为例详细 讲解。
1 机器人工作站的虚实联调
在智能工厂中实现机器人与 Process Simulate 之 间的虚实联调,首先需对机器人进行通讯编程,其次在 博途中进行 PLC 程序的编写,进而实现两者间的数据交 互,最终在 Process Simulate 软件中进行通讯设置 [3]。 1.1 ABB 机器人通讯程序的编写实现机器人工作站与 PS 之间的虚实联调,首先将 机器人各轴数据传输给 PLC,然后 PLC 通过 OPC UA 通讯完成与 PS 之间的数据传输,最终完成 PS 与机器 人工作站间的数据传输。机器人通讯程序编写如下 :
PROC main()
!Set pndo18;
chushihua;
ENDPR
PROC chushihua()
IDelete intno1;
CONNECT intno1 WITH information;
ITimer 0.1.intno1;
ENDPROC
TRAP information
jpos10 := CJointT();
reg6{1} :=jpos10.robax.rax_1;
reg6{2} :=jpos10.robax.rax_2;
reg6{3} :=jpos10.robax.rax_3;
reg6{4} :=jpos10.robax.rax_4;
reg6{5} :=jpos10.robax.rax_5;
reg6{6} :=jpos10.robax.rax_6;
A1 := Round(reg6{1}*10);
A2 := Round(reg6{2}*10);
A3 := Round(reg6{3}*10);
A4 := Round(reg6{4}*10);
A5 := Round(reg6{5}*10);
A6 := Round(reg6{6}*10);
IF A1 < 0 THEN
Set pndo18;
A1 := Abs(A1);
ELSEIF A1 >= 0 THEN
Reset pndo18;
ENDIF
IF A2 < 0 THEN
Set pndo19;
A2 := Abs(A2);
ELSEIF A2 >= 0 THEN
Reset pndo19;
ENDIF
IF A3 < 0 THEN
Set pndo20;
A3 := Abs(A3);
ELSEIF A3 >= 0 THEN
Reset pndo20;
ENDIF
IF A4 < 0 THEN
Set pndo21;
A4 := Abs(A4);
ELSEIF A4 >= 0 THEN
Reset pndo21;
ENDIF
IF A5 < 0 THEN
Set pndo22;
A5 := Abs(A5);
ELSEIF A5 >= 0 THEN
Reset pndo22;
ENDIF
IF A6 < 0 THEN
Set pndo23;
A6 := Abs(A6);
ELSEIF A6 >= 0 THEN
Reset pndo23;
ENDIF
SetGO out1. A1;
SetGO out2. A2;
SetGO out3. A3;
SetGO out4. A4;
SetGO out5. A5;
SetGO out6. A6;
ENDTRAP
1.2 西门子博途程序的编写
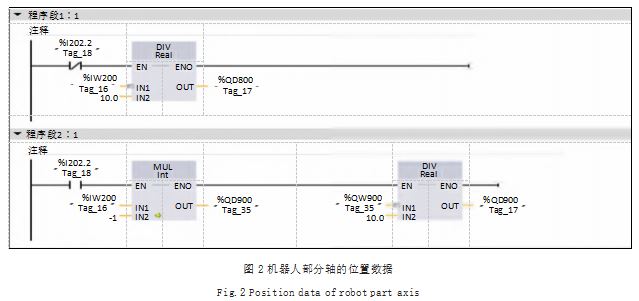
通过编写机器人程序可将机器人各轴的位置数据传 输给外部 PLC,因此借助西门子博途软件进行编程接 收 ABB 机器人发送的位置数据,首先在博途软件中安 装 ABB 机器人的 GSD 文件,其次对机器人的 DI/DO 进行地址分配, 最后根据机器人组数据的地址确定 PLC 端的接收地址,进而完成数据传输。如图 1 所示为机器 人的 DI/DO 地址分配,如图 2 所示为机器人部分轴的 位置数据。
1.3 Process Simulate 位置数据链接
通过以上机器人端的通讯程序编写和西门子 1500 PLC 程序编写,经过调试后机器人端可与 PLC 之间实 现位置数据的交互。同时为实现外部 PLC 与 PS 软件间 的通讯, 则需在 Process Simulate 软件中进行位置数 据的链接,链接完成后可实现软件中机器人位置数据与外部 PLC 间的数据交互,进而实现机器人工作站的虚 实联调。我们以机器人 1 轴为例进行讲解, 2-6 轴方法 同理,1 轴具体链接如图 3 位置数据链接所示。
2 Process Simulate 与 PLC 间的 OPC UA 通讯
2.1 激活通讯通道
2.1.1 PLC 端激活 OPC UA 通道
智能工厂完成数字孪生项目时,需要特定的通讯方 式,大部分工程项目用到 OPC UA 通讯或是 OPC DA 通 讯,西门子 1500 系列的 PLC 支持 OPC UA 通讯 [4],无 需借助第三方软件即可实现。如果 PLC 是西门子 300、 400、1200 系列的则需借助第三方软件方可完成通讯, 我们以西门子 1500 PLC 为例进行讲解。具体设置如图 4 激活 OPC UA 服务器、图 5 运行系统许可证所示。
2.1.2 PS 端激活 OPC UA 通道
在博途 PLC 中激活 OPC UA 通道和运行系统许可证后, 外部 PLC 与 Process Simulate 之间的通讯设置已完 成 50%, 还需在 Process Simulate 软件中进行 OPC UA 通道的设置, 具体设置步骤 :打开 Process Simulate 软 件,点击文件→选项→ PLC →外部连接→连接设置→ 添加→ OPC UA →创建外部连接→输入外部连接的名称 ABB(注 :信号查看器中外部连接选择 ABB)。
2.2 信号创建与映射
在开发完成智能工厂的数字孪生项目时,需完成 1~6 轴的位置数据创建, 在信号查看器中会自动创建系统所需要的实数型(REAL)数据信号,用于系统和外部 PLC 的信息交互,信息交互信号有 BOOL 型、INT 型、 REAL 型等 [4], 在 ABB 机器人与 Process Simulate 软 件实现虚实联调时,只需要获取 1~6 轴的位置数据和法 兰盘执行机构的控制信号即可完成机器人工作站的虚拟 调试,完成信号创建后需对信号进行映射方可完成智能 工厂自动化设备虚拟调试 / 虚实联调。创建的信号 / 映射如图 6 所示。
3 Process Simulate 软件
随着数字化技术的蔓延与发展,Process Simulate 软件的优势更加凸显,软件不但能够提前验证机械设计 的可靠性和稳定性,还能借助博途软件进行自动化程序 的编写,提前验证自动化工艺流程的准确性和可行性。 在没有真实物理属性的设备下,提前将自动化程序编写 完成,大大提高编程效率 [5]。同时,软件可通过三种通 讯方式 PLC Advanced、OPC UA 、OPC DA 实现智能 产线的虚拟调试、虚实联调,并实时监控自动化设备的 运行状态。
在本研究中 Process Simulate 软件主要通过创建 OPC UA 通道,实现软件中机器人与外部 PLC 之间的 通讯,进而获取外部 PLC 中的位置数据,同时与法兰 盘执行元器件的控制信号进行交互,进而实现 ABB 机 器人与 Process Simulate 软件的信号交互, 快速完成 机器人工作站与 Process Simulate 的虚实联调, 本研 究比传统虚实联调的方法优势体现在以下几方面 :
(1)真实机器人的运行路径与 Process Simulate 软 件中机器人运行的路径几乎完全同步,误差在 ±0.2°, 即虚实联调更加准确 ;(2)完成项目的效率更高、更快 ; (3)项目实施更加的便捷方便 ;(4)对项目实施者的能 力要求变低,使得更多的工程技术人员、学校师生参与其中,增加其项目实施的自信心。
4 结语
综上所述,本研究主要阐述了在机器人虚实联调项 目实施时遇到的困难,针对这些困难作者进行了大量研 究和测试,最终得出机器人虚实联调项目实施的最优方 案,使数字孪生虚实联调项目实施难度降低,进而对数 字孪生技术有进阶的推广。希望对与该软件有关的企事 业工程技术人员、高校自动化及相关专业的师生在数字 孪生技术方面的快速提高有所帮助,进而提高项目完成 的效率。
参考文献
[1] 高建华,刘永涛.西门子数字化制造工艺过程仿真:Process Simulate基础应用[M].北京:清华大学出版社,2020.
[2] 西门子工业软件公司.工业4.0实战:装备制造业数字化之道 [M].北京:机械工业出版社,2016.
[3] 崔久好.基于Process Simulate自动化离线编程的应用[J]. 工业控制计机,2022.35(9):62-63+66.
[4] 崔久好.基于Process Simulate在物料智能分拣系统中的应 用[J].中阿科技论坛(中英文),2022(2):108-112.
[5] 崔久好.Process Simulate在综合实训系统设计中的应用 [J].工业控制计算机,2023.36(6):57-59.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/67589.html