SCI论文(www.lunwensci.com)
摘 要 :随着智能制造业的快速发展,数字孪生物流工厂是物流业数字化转型和智能化升级的必然趋势,而孪生物流工厂 中的 AGV 路径规划是关键环节。为了解决物流工厂中动态环境变化下的 AGV 路径规划问题,本文首先通过使用数字孪生技 术、三维可视化技术构建工厂环境孪生空间,结合改进遗传算法对物流运输过程中的路径进行择优规划,执行运输任务,实现 物流工厂过程可视化与运输的高效化。针对动态变化的复杂车间环境问题,建立孪生的智慧物流工厂,通过虚拟空间仿真技术 实时捕捉工厂设备运输状态及受障碍物干扰状况,结合避障算法及时调整能够规避不可预测障碍的可行最优路径。研究结果表 明,通过将嵌入避障算法的改进遗传算法和数字孪生仿真技术相结合的方法,能够缩短运输路径,减少运输时间,提升运输效 率,使工厂作业更具高效性,可以促进物流制造业更加智能化和服务化发展。
AGV Path Planning Method Based on Improved Genetic Algorithm for Twin Plants
WANG Lulu1.2
(1.College of Computer and Information Engineering, Shanghai Polytechnic University, Shanghai 201209;
2. Shanghai Institute of Computing Technology Co., Ltd., Shanghai 200040)
【Abstract】:With the rapid development of intelligent manufacturing, digital twin logistics factories are an inevitable trend for digital transformation and intelligent upgrading of the logistics industry, and AGV path planning in twin logistics factories is a key link. In order to solve the problem of AGV path planning under dynamic environmental changes in logistics factories, this paper first constructs a factory environment twin space by using digital twin technology and 3D visualization technology, and combines improved genetic algorithms to carry out optimal planning of paths in the logistics transportation process and perform transportation tasks, so as to realize the visualization of logistics factory processes and the efficiency oftransportation. To address the problem of dynamically changing complex workshop environment, the twin smart logistics factory is established to capture the transportation status of factory equipment and the interference condition by obstacles in real time through virtual space simulation technology, and to adjust the feasible optimal path that can avoid unpredictable obstacles in a timely manner by combining with obstacle avoidance algorithms. The research results show that by combining the improved genetic algorithm embedded in the obstacle avoidance algorithm and the digital twin simulation technology, it can shorten the transportation path, reduce the transportation time, improve the transportation efficiency and make the factory operation more efficient, which can promote the development of a more intelligent and service-oriented logistics manufacturing industry.
【Key words】: digital twin technology;logistics factory;path planning improved;genetic algorithm;obstacle avoidance algorithm
0 引言
在工业 4.0 的时代大背景下,物流工厂的智能制造 化 [1] 转型已经迫在眉睫,而物流工厂中 AGV 路径规划是数字孪生 [2] 物流工厂的重要环节。20 世纪 50 年代, 国外研发了首台 AGV,在制造业生产、仓储物流、服务 业等领域的应用相当广泛, 但是随着 AGV 应用伴随而来的路径规划的问题也逐渐产生。关于 AGV 路径规划 问题的研究,国内外专家取得了一定的研究成果。由于 国外是最早应用 AGV 的,关于 AGV 路径规划的研究入 手的也比较早。20 世纪 70 年代,Peter 等人 [3] 在研究 路径问题后首次提出 A* 算法, A* 算法主要是针对静态 障碍物环境下的路径规划算法。在 2017 年 Zhang Y 等 人 [4] 提出了对 A* 算法规划路径上不必要节点的删除模 型,实现了对路径长度和拐弯次数的优化 ;国内学者刘 庆元等 [5] 为了改变传统遗传算法存在的缺陷问题,利 用蚁群算法和遗传算法结合来解决机器人的路径规划难 题 ;孙毛毛等为了解决多 AGV 在动态不稳环境下的无 碰撞路径规划和系统效率提升的问题,提出了基于时间 窗的 AGV 无碰撞路径规划方法 [6] ;周加权等针对传统 遗传算法局部寻优精度不高,搜索时间较长的问题,提 出了在遗传算法的基础上加入模拟退火算法的新的改 进型的遗传算法 [7] ;张丹露等为了有效降低物流配送距 离,提高效率,降低成本,利用改进的蚁群算法解决现 代物流运输路径规划方面的车辆调度问题 [8]。
目前,针对 AGV 路径规划算法的研究已经相对比 较成熟,但现有的方法对于动态环境下路径问题的处理 还不太成熟。随着数字孪生仿真技术的发展和车间数据 以及经验的累积,融入算法和模型来解决扰动环境下的 路径问题是值得深入研究的方向。在这样的背景下,数 字孪生技术的提出和发展为解决动态环境下的 AGV 路 径问题提供了新思路。现阶段已经有将数字孪生技术应 用于物流规划领域的研究 :C.K.M.Lee 等 [9] 提出了一 个面向智能机器人仓库的信息系统模型来实现工作流数据收集和过程监控,并制定了 3 种冲突避免策略来解 决移动机器人路径冲突问题。由此可见,目前数字孪生 技术在物流工厂已经有实践性的研究。但是,数字孪生 工厂的建模主要依赖于数据,如果不能实时获取数据就 造成孪生模型与真实运输环境不匹配,对于路径的规划 也就不准确,这是目前需要考虑的问题。本文为了解 决 AGV 在动态环境下的最优路径问题,通过使用数字 孪生技术构建物流工厂孪生的虚拟空间,结合改进遗传 算法的路径规划方法,将所构建的模型与改进的遗传算 法相结合,嵌入避障算法,仿真并规划出 AGV 小车在 运输时的最优路径,应用于物流工厂运输作业,将提升 运输效率,减少运输故障。除此之外,鉴于物流工厂中 运输环境复杂,在 AGV 小车运输过程中会偶然出现不 可预测的障碍物阻碍运输,为了快速应对动态变化的运 输环境,提高运输效率,通过建立物流工厂车间动态三 维虚拟模型 [10],实现物流车间与虚拟空间的实时映射, 利用虚拟空间和嵌入避障算法的改进遗传算法在遇到 障碍物时快速调整运输路径,以实现物流工程运输效 率更高,数字孪生技术 [11] 以及三维可视化技术在物流 工厂领域的更加广泛应用,促进制造业智能化和服务化 发展。
1 方法
1.1 数字孪生物流工厂 AGV 路径规划系统架构
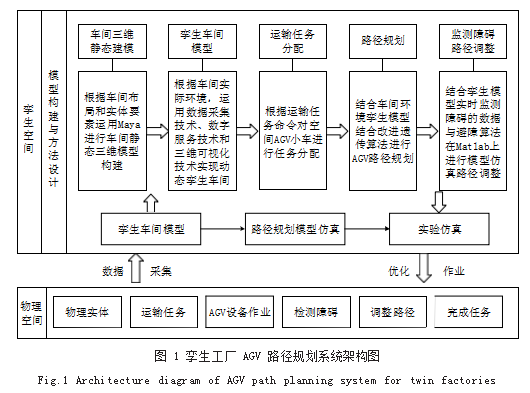
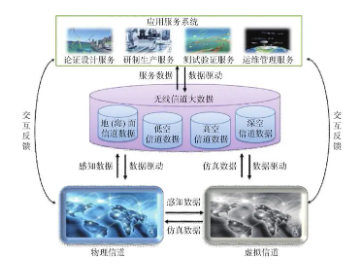
随着智能制造时代的到来,数字孪生技术也日趋成 熟,然而, 由于复杂的车间环境, AGV 路径的规划 [12] 仍有待改进。不可预测的动态车间环境是影响 AGV 路 径规划的重要因素之一,本文通过数字孪生技术、三维动态建模技术 [13] 以及数据服务技术 [14] 实现虚拟数字孪 生车间与真实车间实时动态数据传输 [15],及时更新车 间环境状态,为 AGV 路径规划算法提供实时的数据基 础。整个系统架构分为物理空间和虚拟空间两部分,使 用数字孪生技术和数据服务技术建立与物理空间在时 态、相态和状态上完全一致的虚拟空间,虚拟空间通 过 MQTT 数据协议从物理空间中获得抽象数据,依次 向 AGV 发送数据命令,通过遗传算法和避障算法改进 AGV 路径, 虚拟空间进行仿真模拟 [16],当寻找到有效 路径时,将路径传输至物理空间进行实施,实现有效提 升物流车间运输效率,其具体的孪生工厂 AGV 路径规 划系统架构如图 1 所示。
1.2 数字孪生物流工厂构建
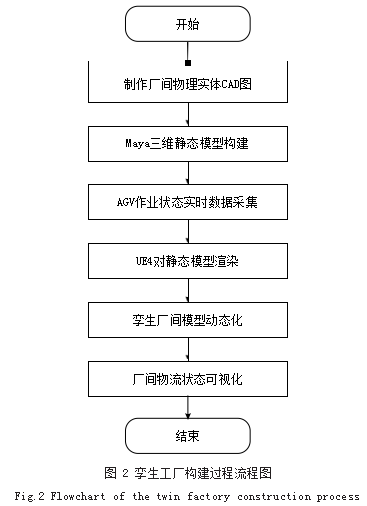
数字孪生虚拟车间 [17] 的构建,需要用到三维动态 建模技术、数据服务技术以及三维可视化技术。数字孪 生工厂构建过程流程图如图 2 所示。
1.2.1 数字孪生物流工厂中静态模型构建
首先, 对物理实体 AGV、输送机、堆垛机等物流 设备部件及仓库场景进行手工拍照计算建模物体的物理 信息绘制 CAD 图,之后在 Maya 根据 CAD 文件进行 物理实体模型的构建 [18],模型构建完成后,在 3D 引擎中根据具体工厂设备位置的 CAD 布局图将物理实体 模型摆放,固定位置的建筑和设备直接放置在搭建好的 4 层楼体内,至此就构造出物流工厂车间静态的三维模 型,后期再通过渲染形成孪生虚拟空间,孪生车间模型 图如图 3 所示。
1.2.2 数字孪生物流工厂中的数据服务技术与模型动态化
构建动态化的数字孪生物流工厂模型需要数据服务 技术、数据采集技术以及渲染技术。当物流工厂车间物 流过程中设备状态发生变化时,通过数据接口和 PLC 控 制采集器向物理实体空间采集物流运输状态信息实时数 据 [19], 虚拟空间与物理空间通过 MQTT 协议进行通信传 输, 紧接着再使用 UE4 引擎对孪生厂间三维模型实时渲 染,每个孪生场景的楼层光源,根据物理时间,一定程度 上实现动态光源展示,实现昼夜交替,设备部件状态、位 置动态展示,至此与物流工厂时态、动态、形态上完全一 致的孪生工厂构建完成。客户端可以通过点击孪生模型设 备界面获取物流状态位置信息及 AGV 运输任务状态。
1.3 基于改进遗传算法和避障算法的 AGV 路径规划
在孪生运输工厂中,货物运输是不可或缺的环节, 然而影响运输效率的关键因素是 AGV 车辆的运输效率。 在路径选择中将改进遗传算法与虚拟空间仿真相结合, 对 AGV 运输路径进行规划。通过将孪生模型实时监测 障碍的数据与嵌入避障算法相结合,在 Matlab 上进行 模型仿真, 对遇到障碍物的 AGV 小车进行路径调整, 保证 AGV 正常运作,提升物流工厂运输效率。
1.3.1 改进遗传算法的厂间 AGV 路径规划
遗传算法 [20] 是受达尔文生物进化论影响的一系列 搜索算法,经过模仿自然选择和遗传原理的进程仿真出 来的计算模型,可以克服传统搜索和优化算法遇到的一 些障碍,通过模拟自然进化进程搜索优化各种问题的解 决方案。本文通过在传统遗传算法中加入避障算法,优 化 AGV 运输路径。修改后遗传算法在孪生工厂 AGV 路径规划中的算法流程图如图 4 所示。
(1) AGV 路径问题模型分析。针对 AGV 路径这一 对象,结合数学思想,将孪生的厂间小车路径问题抽 象,通过必要的运输结点及避免碰撞最优化路径约束条 件,对路径问题模型进行分析。
(2) AGV 路径初始化。对于路径问题模型进行浮 点数编码转化为计算机可解决的问题,然后通过解码转 化为实际的路径问题。编码路径问题后,车间运输线上 的许多路径(遗传算法中的染色体)由许多节点(遗传 算法中的基因)组成,多条路径组成初始种群。
(3)障碍检测与适应度计算。在实际物流车间运输 过程中,会有部分障碍物在不可预测的地方出现,阻碍 AGV 小车正常行驶,因此传统遗传算法获取的初始种 群中可能存在不能通行的路径,根据这种状况,在获取 初始种群的过程中加入 VFH 避障算法(又称向量场直 方图算法),以此排除不可行路径。
(4)轮盘选择法 [21]。本文使用轮盘选择法初步寻 找出最优的厂间 AGV 运输路径方案并保留。
(5)交叉变异操作。首先 AGV 路径的起始点和终 止点是固定的,所选路径中的其他节点进行单点交叉, 得到一个新的 AGV 路径。对种群中的路径进行判断是 否需要变异操作,如果需要,则进行变异,用其他等位 节点(基因)替换需要变异的节点(基因)从而产生新 的路径(染色体),并形成新的种群。
(6) 重复第(3)、(4)、(5) 步流程, 遗传终止, 得到 AGV 最优路径。
1.3.2 嵌入避障算法的种群初始化
物流厂间地图环境是路径规划的基础,通过构建 栅格地图 [22] 来构建物理厂间的静态部分,其中起始栅格和终止栅格分别代表 AGV 小车路径的起始点和终止 点,黑色栅格中的代表障碍物,白色栅格表示可通行栅 格。在传统遗传算法中获取初始种群是随机选取任意栅 格,由于物流厂间环境的动态变化,在部分位置不可预 测的会出现一些障碍物,阻碍小车运输,在这种情况 下,通过嵌入 VFH 避障算法 [23] 改进初始种群的获取, 以便于直接排除不可行的路径,避免发生无法预测的碰 撞。VFH 避障算法将 AGV 车的运行环境分解为一系列 栅格,每个栅格在地图上有一个累积值,表明障碍物存 在的可信度越高,障碍物存在的概率就越高,在种群初 始化过程中,排除对存在障碍物可能性高的栅格进行搜 索。首先,将栅格为障碍物的栅格的信任度取值为 1. 可以运输的栅格的信任度取值为 0.选取运输路径的起 始位置和终止位置 ;其次, AGV 小车从起点开始运输, 每次向上运行,就对栅格的信度进行判断,若信度为 0. 则为可行, 并将可通行点纳入可通行路径节点集合 中,若信度为 1.则表示此栅格为障碍物栅格,不可通 行,排除此栅格,继续向前搜索,直到搜索至重点,即 搜索结束,将可通行路径节点集合中的基因节点进行连 接即可形成染色体(路径),通过重复以上操作寻找多 条染色体即可组成初始种群。
1.3.3 适应度计算
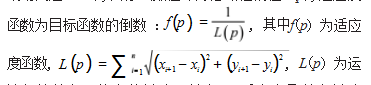
遗传算法对于个体的优劣判定的基本依据就是适应度 函数值 [24],一般适应度函数 [25] 取目标函数值的倒数,当目 标函数值愈大时,适应度函数值 [26] 愈小,个体就越优秀, 就愈能呈现遗传算法中“优胜劣汰”的思想。在 AGV 路径
规划问题 [27] 中,目标函数值即为总路程的值L(p),适应度函数为目标函数的倒数 :
为运输起始节点至终点的总路程长度,而适应度函数为总路 程的倒数。
1.3.4 轮盘赌选择
在遗传算法中,通过选择的方式将优秀的个体遗传 至下一代,选择方式多种多样,本文采用的是轮盘赌选 择法,轮盘赌选择法是各个个体被选中的概率值与其适 应度函数的比值,然后在 [0.1] 内产生一个均匀分布的随 机数,若此随机数比值小,则该个体即可被选择。具体 的步骤如下 :首先,先计算种群中各个个体的适应度f, 然后计算每个个体在总体中所占的比率 P=f/f 总,计算每 个个体累积概率,在轮盘中做下标记,在 0-1 闭区间中随机生成一个数 r,对比 r 与 P, r 在 P 之内,则该个体 将被选择,重复以上操作获取多个个体,形成新的种群。
2 仿真实验与分析
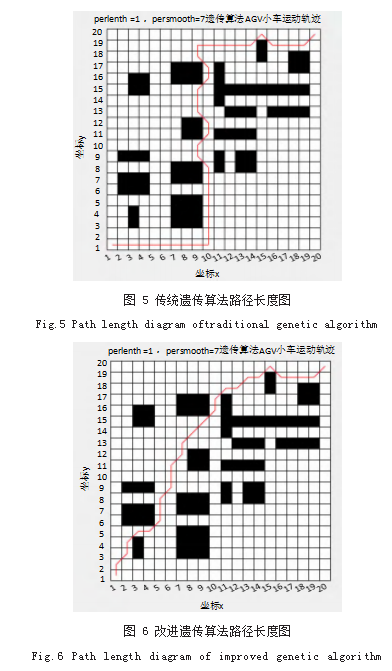
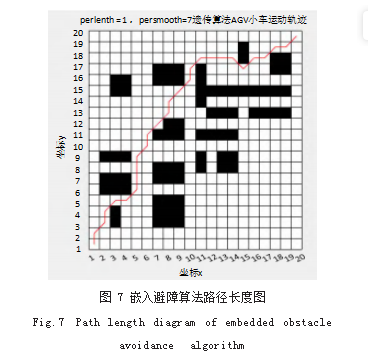
遗传算法中交叉概率和变异概率选取定值,一般 而言,交叉概率在 [0.9.0.97] 随机取值,变异概率在 [0.001.0.1] 随机取值。在过去的遗传算法中,交叉概率 选取值为 0.8. 将变异概率选取为 0.01. 通过嵌入避障 算法的遗传算法使交叉概率的值为 0.65.变异概率的 值设置为 0.1.使用 Matlab 进行数据仿真,通过对比 得到的实验结果如图 5- 图 7 所示。
经过将传统遗传算法、改进后遗传算法以及嵌入避 障算法的路径图进行对比,明显可以看出改进后的遗传 算法路径更加顺畅且短,通过数字孪生车间按此路径进 行仿真也可以得到此路径耗时更少,在实际运输过程中 也可以提高运输效率。在遇到干扰的障碍物时数字孪生 技术结合嵌入避障算法规划的路径可以及时规避障碍迅速调整路径方案, 调整后的路径相较改进算法更加顺畅 且短,运输效率更高。
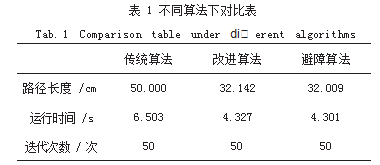
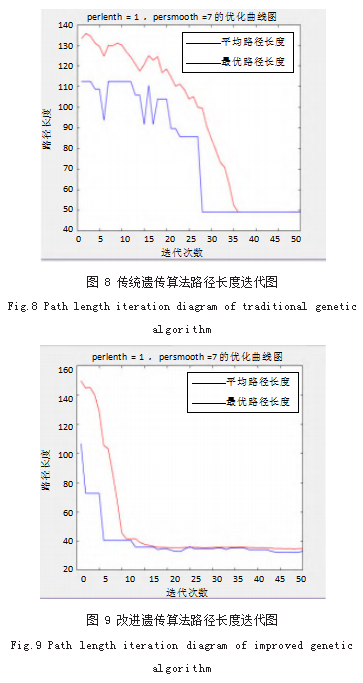
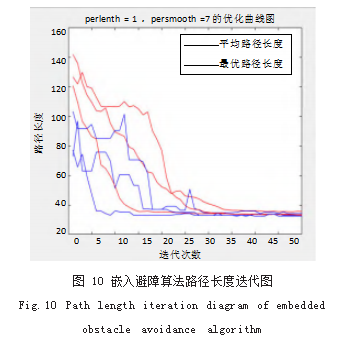
如图 8- 图 10 所示,经过对比发现,改进的遗传算 法从第 10 次迭代之后就趋于稳定,而传统遗传算法从 第 35 次迭代后才区域稳定, 可见路径长度可顺滑程度 都有所提升。如表 1 所示,改进遗传算法与传统遗传算 法相比路径缩短了 35.7%,运输时间减少了 33.461%, 由此可见,通过改进遗传算法规划的 AGV 小车运输路 径可以提升厂间 AGV 小车的运输效率。通过遗传算法 和避障算法获得 AGV 小车的最优路径之后,厂间的静 态三维模型通过对厂间小车数量和状态等接口信息进行 数据采集,通过发布路径执行命令进行仿真模拟,当货 物输送量较大时,直接通过孪生的虚拟厂间对 AGV 小 车货物的运输路径进行仿真, 如遇到障碍及时调整路径 方案,按最优路径进行执行,节省运输时间冗余,提升 运输效率,增加企业的效力。
3 结论
本文通过建立物流工厂车间的数字孪生厂间 [28] 虚 拟空间模型,实时采集车间小车作业状态,在 AGV 小 车路径规划中结合了改进的遗传算法和避障算法, 使用 Matlab 进行仿真实验,实验研究发现孪生工厂结合改进的遗传算法规划出的路径更优、更高效、更能节约成 本。通过传统遗传算法和改进遗传算法对比实验,获取 AGV 小车的最优路径,并通过孪生虚拟空间进行时态、 相态和状态上的高度仿真模拟 AGV 输送路径,及时规 避运输障碍和路径的不合理性,然后在物理厂间进行任 务输送,提升厂间的输送效率,避免输送故障。总而言 之,该方法的应用有助于帮助企业直击物流设备运营状 态,及时规避运输障碍,提升运营效率,增强企业收益 与核心竞争力。
参考文献
[1] 曾纯.智能制造中国化[J].中国工业和信息化,2022.8(01):2. [2] 王爱民.面向智能生产管控的数字孪生技术[J].人工智能, 2021.8(02):12-20.
[3] HART P E,NILSSON N J,RAPHAEL B.A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J].IEEE Transactions on Systems Science & Cybernetics,1972.4(2):28-29.
[4] ZHANG Lian-chao,LIU Wei-ran,CHENG Jiang-feng,et al.Just-in-time material distribution method for satellite assembly digital twin shop-floor[J].Computer Integrated Manufacturing Systems,2020.26(11):2897-2914.
[5] 刘庆元.基于蚁群算法和遗传算法融合的移动机器人路径规 划问题研究[J].湖北农机化,2017.39(05):70.
[6] 孙毛毛,匡兵.基于时间窗的AGV动态避碰路径规划方法[J]. 计算机应用研究,2022.39(01):54-58.
[7] 周加全.基于改进遗传算法路径规划问题的研究[J].微型电 脑应用,2021.37(11):1-3+8.
[8] 张丹露,黄向红 .基于改进蚁群算法的物流路径优化研 究— 以河南省物流网络为例[J].河南工业大学学报(社会科学 版),2021.37(02):56-60+96.
[9] LEE C K M,LIN B,NG K K H,et al.Smart Robotic Mobile Fulfillment System with Dynamic Conflict-free Strategies Considering Cyber-physical Integration[J]. Advanced Engineering Informatics,2019.42:1-12.
[10] 王水龙,汪锦熙.构建三维动态企业战略绩效评价模型研究 [J].经营与管理,2017.35(12):62-65.
[11] 朱惠斌.国内外数字孪生技术研究进展与实践展望[J].信息 通信技术,2022.16(05):75-80.
[12] 陈洋,林其岳,邓志华,等.AGV路径规划算法研究进展[J].机 电技术,2022.46(05):39-43.
[13] 朱庆,张利国,丁雨淋,等.从实景三维建模到数字孪生建模 [J].测绘学报,2022.51(06):1040-1049.
[14] 李源.大数据及云服务技术在信用风险管控领域应用的现状与问题[J].财经界,2018.63(14):40-41.
[15] 黄晓斌,张兴旺.网络动态数据挖掘模式及其关键技术[J]. 图书情报工作,2015.59(10):21-28+47.
[16] 马志广,霍红果,王生旭,等.数字孪生技术在牵引变电所二 次系统仿真模拟中的应用[J].科技与创新,2022.9(21):179-181. [17] 陶飞,张萌,程江峰,等.数字孪生车间—一种未来车间运 行新模式[J].计算机集成制造系统,2017.23(01):1-9.
[18] 孟琳,古平.指挥控制系统设备实体模型构建[J].科技创新 与应用,2022.12(13):8-13.
[19] 周帅昌,刘丽兰,高增桂.数字孪生车间的模型与数据采集 优化[J].工业控制计算机,2021.34(12):14-16.
[20] 张铮,柯子鹏,周嘉政,等.基于改进多目标自适应遗传算法 的机器人路径规划[J/OL].西安理工大学学报,2022.45(04):1-11. [21] 陈雯祎,李琪.一种基于轮盘赌选择的改进遗传算法[J].福 建电脑,2016.32(05):50-51.
[22] 刘安睿劼,王耀力.基于轮式机器人的实时3D栅格地图构建[J].计算机工程与应用,2020.56(13):164-171.
[23] 周俊,庄宇辉,严华.基于记忆矩阵A~*引导域的VFH算法改 进策略[J].四川大学学报(自然科学版),2020.57(04):704-710. [24] 玄登影,王福林,高敏慧,等.一种改进适应度函数的遗传算 法[J].数学的实践与认识,2015.45(16):232-238.
[25] 刘英.遗传算法中适应度函数的研究[J].兰州工业高等专科 学校学报,2006.14(03):1-4.
[26] Leske Mike,Bottacini Francesca,Afli Haithem, et al.BiGAMi:Bi-Objective Genetic Algorithm Fitness Function for Feature Selection on Microbiome Datasets[J].Methods and Protocols,2022.5(3).
[27] 辛钢,宋少忠,张慧,等.基于改进遗传算法的路径规划问题 应用[J].吉林大学学报(信息科学版),2022.40(06):946-953. [28] 姜浩,范志鹏.数字孪生在智慧工厂中的应用探讨及案例分 析[J].现代信息科技,2022.6(12):146-149+155.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/62133.html