SCI论文(www.lunwensci.com):
摘要:无人天车智能路径规划系统能高效接收智能无人天车系统和库管系统信息,自动规划天车作业的行走路径,有效解决了无人天车运行路径僵硬、运行轨迹无法模拟人工操作轨迹、程式化痕迹明显等问题,提高了天车作业效率,减少了事故安全隐患。无人天车智能路径规划系统配置方法及内容主要作用是针对不同的库区和不同的天车能够快速修改程序参数,提高开发效率,并利于用户后期维护和使用。具体配置内容包括:库区配置、天车配置、相关设备配置、障碍物配置。
关键词:无人天车;路径规划;系统配置
Configuration Method and Content of Intelligent Path Planning System for Unmanned Crane
ZHOU Zhidong,LI Zhiliang
(Tangshan Iron and Steel Group Co.,Ltd.,Tangshan Hebei 063000)
【Abstract】:The intelligent path planning system of unmanned crane can efficiently receive the information of intelligent unmanned crane system and warehouse management system,automatically plan the travel path of crown block operation,effectively solve the problems of rigid operation path of unmanned crane,unable to simulate manual operation track,obvious programmed trace and so on,improve the operation efficiency of crown block and reduce the potential safety hazards of accidents.The main function of the configuration method and content of the intelligent path planning system of unmanned crane is to quickly modify the program parameters for different reservoir areas and different crown blocks,improve the development efficiency,and facilitate the later maintenance and use of users.The specific configuration contents include:Reservoir area configuration,crown block configuration,relevant equipment configuration and obstacle configuration.
【Key words】:unmanned crane;path planning;configuration
0引言
随着技术的发展,用户对无人天车提出了更高需求,主要集中在天车自动运行时,天车运行轨迹无法模拟人工操作轨迹,程式化痕迹明显,起升和下降的作业效率低于人工操作。这些问题不仅制约了无人天车技术的可持续发展,也造成了很大一部分客户驻足观望,对于技术的发展产生了不良影响。
为解决上述问题,开发了无人天车智能路径规划系统。系统主要应用在冷轧库和热轧库环境下,服务于天车无人化运行。系统不仅能够规划库区区域、垛位使用、相关设备鞍座状态、安全行走通道、障碍物避让区域等信息,还可以依据现场实际信息对库区进行配置、对天车进行配置、对相关设备进行配置等。
1总体思路
无人天车智能路径规划系统通过工业以太网与智能无人天车系统、库管系统进行数据交换。系统基于Oracle数据库,使用高级汇编语言实现向面向用户的开放式人机接口的功能转化。通过实时的数据采集,能够及时、准确、动态的反馈现场实际设备的当前状态,能够高效接收智能无人天车系统和库管系统信息,自动规划冷轧库或热轧库天车自动作业的行走路径,实时反馈自动运行的天车状态。有效解决了冷轧库和热轧库无人天车运行路径僵硬的问题,解决了天车运行轨迹无法模拟人工操作轨迹,程式化痕迹明显等问题,提高了天车作业效率,减少了事故安全隐患。
无人天车智能路径规划系统配置方法及内容主要作用是针对不同的库区和不同的天车能够快速修改程序参数,提高开发效率,并利于用户后期维护和使用。具体配置内容包括:库区配置、天车配置、相关设备配置、障碍物配置。
2库区配置
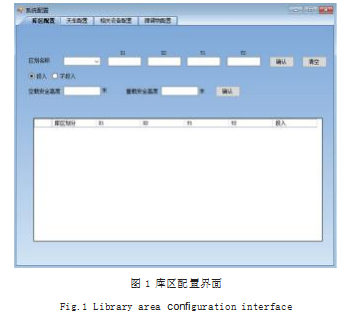
库区配置界面分为两部分,上半部分为配置数据填写界面,下半部分为库区配置显示界面,如图1所示。
区划名称后下拉菜单可以选择整个库区内已命名的区域,并在后面填写区域范围,X1为大车方向最小坐标值,X2为大车方向最大坐标值,Y1为小车方向最小坐标值,Y2为小车方向最大坐标值,点击确认后,可将填写数据写入到数据库中,并显示在下方dataGridView中。投入与不投入可以选择当前区域是否投入使用,当选择投入时天车可生成至此区域的工单,当选择不投入时此区域默认为码放的都是二层卷,不可用。
空载安全高度表示天车空载时主钩提升的安全高度,重载安全高度表示天车吊着钢卷时主钩提升的安全高度。
界面下方的dataGridView内显示库区划分情况和是否投入的情况。
3天车配置
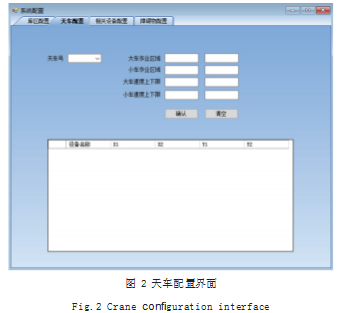
天车配置界面分为两部分,上半部分为配置数据填写界面,下半部分为天车配置显示界面,如图2所示。
天车号后下拉菜单可以选择整个库区内已存在的天车,并在后面填写大车作业区域范围、小车作业区域范围、大车速度上下限、小车速度上下限,点击确认后,可将填写数据写入到数据库中,并显示在下方dataGridView中。
界面下方的dataGridView内显示库区划分情况和是否投入的情况。
4相关设备配置
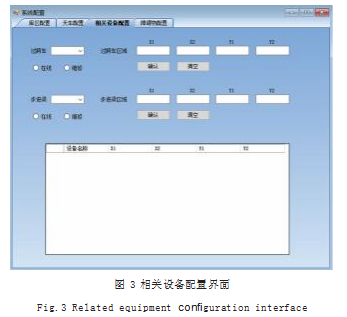
相关设备配置界面分为两部分,上半部分为过跨车和步进梁的配置数据填写界面,下半部分为相关设备配置显示界面,如图3所示。
过跨车后下拉菜单可以选择不同的过跨车,并在后面填写过跨车作业区域范围,X1为大车方向最小坐标值,X2为大车方向最大坐标值,Y1为小车方向最小坐标值,Y2为小车方向最大坐标值,点击确认后,可将填写数据写入到数据库中,并显示在下方dataGridView中。在线与维修可以选择当前过跨车是否投入使用,当选择在线时过跨车可生成工单与天车交互,当选择维修时此过跨车不可用。
步进梁后下拉菜单可以选择不同的步进梁,并在后面填写步进梁作业区域范围,X1为大车方向最小坐标值,X2为大车方向最大坐标值,Y1为小车方向最小坐标值,Y2为小车方向最大坐标值,点击确认后,可将填写数据写入到数据库中,并显示在下方dataGridView中。在线与维修可以选择当前步进梁是否投入使用,当选择在线时步进梁可生成工单与天车交互,当选择维修时此步进梁不可用。界面下方的dataGridView内显示过跨车和步进梁的作业区域情况。
5障碍物配置
障碍物配置界面分为两部分,上半部分为障碍物配置数据填写界面,下半部分为障碍物配置显示界面,如图4所示。
障碍物后下拉菜单可以选择不同的障碍物,并在后面填写障碍物等效矩形区域,X1为大车方向最小坐标值,X2为大车方向最大坐标值,Y1为小车方向最小坐标值,Y2为小车方向最大坐标值,点击确认后,可将填写数据写入到数据库中,并显示在下方dataGridView中。
界面下方的dataGridView内显示障碍物等效矩形的坐标。
6结论
通过对无人天车智能路径规划系统的功能参数进行合理归类,形成配置文件,针对库区配置、天车配置、相关设备配置、障碍物配置进行资源参数配置,从而优化系统运行参数,同时增加了系统的可移植性和扩展性,从而提高了系统开发效率,并方便用户的后期维护和使用。
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/36634.html