SCI论文(www.lunwensci.com)
摘要:本文展示了一套经自然腔道手术(NOTES:Natural Orifice Transluminal Endoscopic Surgery)的手术系统的开发。本系统主要包括一对遥操作主手,以及具有多个自由度的连续体结构的夹钳及黏膜切开刀。着重阐述了一对主手、末端连续体夹钳及连续体黏膜切开刀的机械结构,展示了主手和末端夹钳、切开刀之间的主从控制,运动学算法的验证以及在双通道内镜下夹取切割效果的实验验证,进而探究整套手术系统后续应用的可行性。
关键词:经自然腔道手术;遥操作;连续体机器人;主从控制;双通道内镜
A Teleoperated Dual-arm Surgical Robotic System
YUAN Chunmei,CHEN Long,SHI Guofeng,SHEN Luchen,CHEN Jianxiao
(Shenzhen ROBO Medical Technology Co.,Ltd.,Shenzhen Guangdong 518118)
【Abstract】:This paper demonstrates the development of a surgical system for Natural Orifce Transluminal Endoscopic Surgery(NOTES).The system mainly consists of three parts:A pair of master manipulators used for teleoperation,a roboticized forcep,and a roboticized electrosurgical knife,both are continuum robots with multi degrees-of-freedom(DOF)backbone structure.Mechanical designs of master manipulators,continuum backbone structure of forcep and electrosurgical knife were illustrated,followed by experimental validation of master-slave-control between master manipulators and slave instruments(in this case,forceps and electrosurgical knife).The kinematics andflexibility of the slave instrument were further proven by experiment conducted with dual-channel endoscope.Finally,applicability of this surgical system was discussed for future applications.
【Key words】:NOTES;teleoperation;continuum robot;master-slave-control;dual channel endoscope
0引言
近年来,随着机器人技术迅速发展,相关产品已逐步应用到各行各业中[1]。而医疗行业中,消化内镜手术,心血管介入[2],外科手术等由于其手术难度高,对医生的操作手法和技巧的要求很高,同时培训时间周期很长,因而此类手术对机器人技术有着迫切的需求。同时,随着人们对术后康复要求的日益提高,微创手术由于其创口小、恢复快等优势,逐步得到了越来越多的引用,因此微创手术机器人是未来手术发展的趋势。
在不同手术场景下,微创手术机器人中CR(CR:Continuum Robot)技术的应用日益广泛,常见的MIS(Minimal Invasive Surgery)会在腹腔开孔,有明显创伤[3];同时刚性器械无法进入很多部位,限制了其应用范围,比如呼吸道、消化道、泌尿科等。相较而言,CR可以经人体自然腔道进入,完成一些刚性机器人无法完成的手术。人们在各种临床术式中都进行了CR应用的探索。如肺部和气管、消化道、泌尿、腹腔镜机器人(如达芬奇SP)等。
随着手术机器人的日渐发展,遥操作主手的应用也日益广泛,用以配合完成机器人辅助微创手术RAMIS(Robot-assisted Minimally Invasive Surgery),进而能带来诸多好处:比如减小医生的疲劳,操作简单自然,消除医生手部抖动,提高手术的安全性、精确性、灵活性,调节运动比例缩放,减小对有害射线的暴露,进行远程手术等[4]。因此,遥操作主手是微创手术机器人系统中至关重要的一部分。
本文将开发1套内镜下手术系统,包括1对主手,1套黏膜切开刀及1套连续体夹钳结构。本文将从主手的结构设计及仿真验证,连续体夹钳及切开刀的结构组成,整套系统的联动控制算法以及功能展示几个方面进行介绍,并最后进行此类手术系统的总结和展望。
1主手设计
1.1机械设计
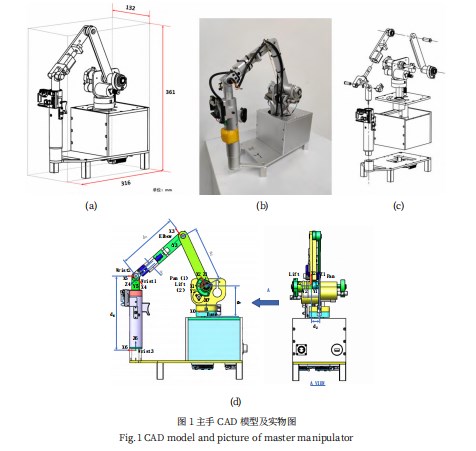
带有力反馈功能的主手一般有串联式和并联式两种构型,各有其优劣势。并联式机器人的优点是惯量小,机器人单位重量的功率输出高,能实现较高的负载能力和刚度,通常用在需要快速运动的场景下经常见到并联机器人的身影,但缺点是工作空间较小并且难于进行运动分析,运动学和动力学的建模都相对复杂[5]。由于本文开发的力反馈主手目标场景是微创机器人手术,不需要高速的运动或较高的负载,因此选择串联式构型,工作空间更大且易于分析,运动学和动力学的建模直观。设计的主手CAD模型如图1(a)所示。
从实物图可以看到,主手有7个自由度,包括3个位置关节,3个姿态关节和1个夹钳开合。在下文的主从运动计算中,使用的是第4关节处的位置。在第4关节位置确定的情况下,主手握把依然可以转动,具备一定的灵活性。前3个关节集成了电机,可以产生力矩,提供力反馈;后3个关节由电位计读取角度。主手的握把位置有一个开合按钮,也集成了电机,不仅能够控制从手末端夹钳的开合,还能够反馈从手端感应到的夹持力,使得操作者不仅拥有接触力反馈还具有夹持力的感知。相比于一般主手来说,本文的主手多一维度的感知。
除了一只具备力反馈的串联式主手,另一只主手由于是控制连续体黏膜切开刀,不需要力反馈功能,因此在该主手的基础上,各关节位置由电机变更为电位计,实现6个关节自由度转动,包括位置的3个自由度和姿态的3个自由度,将整个主手进行了简化,同时保证了控制功能,医生在握住该主手后,能够进行黏膜切开刀的运动控制。
1.2电气设计
主手的电气硬件布局如图2所示。每一块EPOS2驱动器都由24V直流电源供电。PC和EPOS2驱动器之间采用USB Gateway的方式进行通讯:PC通过CAN转USB模块和其中一块EPOS2驱动器实现通讯;每块EPOS2驱动器之间通过CAN总线方式进行通讯。这样PC发送的命令就可以通过CAN总线传递到每一块EPOS2驱动器上,EPOS2驱动器再根据收到的命令对电机进行驱动或者发送读取的信号返回至PC。PC端负责运行主手的主从控制程序,进行运动学、动力学计算以实现位置控制和力反馈。
1.3运动仿真
本文采用机器人操作系统(Robot Operating System–ROS)作为仿真和调试的平台。ROS是一个开源的机器人操作系统,拥有各种机器人相关的函数库。在ROS中,Rviz通常被用来作为仿真可视化的工具。按照章节2.1中的设计,可以在SolidWorks中导出一个URDF(Unified Robot Description Format)文件。ROS可以读取URDF中所有关于机器人的信息,并可以将机器人显示在Rviz的仿真环境里,如图3所示(其中图3(a)为主手零位;图3(b-f)为随机变化主手位置时,主手实物照和仿真对比照)。并且,在建立了图2的通讯之后,各个关节的实时角度信息都可以读取到PC,并且发送到ROS相应的信息节点(Topic)上,在Rviz里面实时显示出来。如图3(b-f)所示,握住主手的握把随机变化几个位姿,在Rviz仿真下的主手位姿都跟真实的主手位姿一致。这不仅验证了仿真环境的真实性,也说明得到的关节角度信息是实时准确的,从而验证了图2中的通讯是精确和实时的。
2切开刀及柔性臂设计
本文选用线驱动(Tendon-driven)的方式驱动连续体结构。尽管线驱动不是连续体机器人唯一的驱动方式,但是其他驱动形式都存在一些局限性,以至于无法应用在手术机器人场景中。例如磁驱动需要庞大的外部磁场发生器,同心管驱动尽管可以做的很小,但无法做到足够细长。因此,线驱动仍然是多数系统的首选[6]。综上所述,本文设计的连续体结构采用了单节,4根线线驱动结构形式。
2.1黏膜切开刀
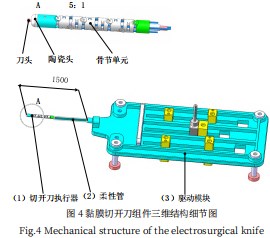
本文的黏膜切开刀如图4所示,整个结构分为三部分:(1)切开刀执行器;(2)柔性管;(3)驱动模块。
第一部分切开刀执行器是手术中和患者交互的部分。切开刀执行器中的刀头能够相对陶瓷头运动,伸出时进行病灶的切割或止血,缩进时可以避免误伤其他黏膜位置。陶瓷头固定在一个蛇骨结构上,蛇骨中的各个骨节单元通过铆接固定在一起,每组相邻骨节单元之间能够进行相对摆动。蛇骨结构的驱动通过4根球头钢丝绳完成,均匀分布在蛇骨内侧4个方向上,进而带动整个切开刀刀头两个方向的偏摆,实现内镜视野下的灵活运动。
第二部分柔性管为聚四氟乙烯管,上述4根钢丝绳在穿出蛇骨后,包裹着聚四氟乙烯管进入外套管中,聚四氟乙烯管能够显著减小钢丝绳之间的摩擦。柔性管的一端和蛇骨结构相连,另一端固定在驱动模块上。
第三部分驱动模块根球头钢丝绳分别穿过引线槽上的对应小孔,通过铝套进行限位固定。此外,中心的驱动钢丝穿过引线槽后,在先穿过导电柱后,再穿过中间滑块,分别完成固定,进行导电。
在操作中,通过主手控制驱动单元的运动,控制钢丝绳的拉紧和放松,实现刀头伸缩及蛇骨两个自由度弯曲的功能,此外驱动单元能够带动切开刀完成前后进给,而脚踏能够控制高频发生器的电路导通,进一步控制刀头的放电时机,顺利完成病灶的切除。
2.2柔性臂夹钳
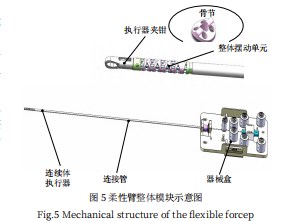
本文的柔性臂夹钳整体结构设计如图5所示(柔性臂整体结构:连续体执行器,连接管,器械盒;连续体执行器的细节:执行器夹钳,整体摆动单元,单个骨节。)分为三部分:(1)连续体执行器;(2)连接管;(3)器械盒。
第一部分连续体执行器是在手术区域与患者交互的部分。执行器夹钳由两片钳口组成,拉紧不同钢丝绳达到钳口开合的效果。整体摆动单元由骨节单元组成,骨节中心孔用于通过控制钳口开合的两根钢丝绳;中心孔周围均匀分布四个小孔,用于穿过控制偏摆的四根钢丝绳。第二部分连接管为同步旋转弹簧管,上述6根钢丝绳,在依次穿过所有骨节后穿入连接管内。连接管能传递扭矩以实现同步旋转。连接管的一端与连续体执行体相连,另一端与第三部分(即器械盒)连接。在柔性臂夹钳使用过程中,6根钢丝绳从同步旋转弹簧管末端穿出,通过抱紧座正反周向转动,进而末端骨节实现偏摆,夹钳开合。钢丝绳抱紧座底部连接驱动单元上的控制电机。此设计能够在快速拆装的同时,实现位置的精确传递。
3运动学算法
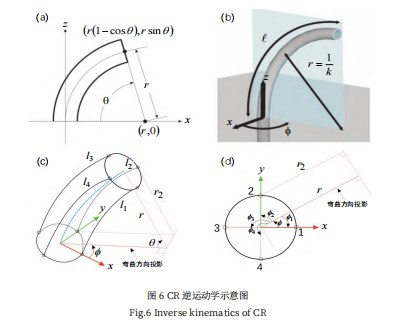
对于常曲率模型CR的逆运动学求解,可以分成两个部分:(1)CR几何部分的求解(如图6(a)和图6(b)所示),解决从CR笛卡尔空间到CR圆弧几何参数的映射;(2)拉线部分的求解(如图6(c)和图6(d)所示),解决从CR几何参数到驱动端拉线长度的映射。
图6(a)是当旋转角ϕ为零时,CR在xz平面内的弯曲;图6(b)是当旋转角ϕ不为零时,CR曲线的示意图,其中的参数包括线长l、曲率k、半径r=1/k;图6(c)是4根线驱动的CR的圆弧弯曲示意图和各参数示意图:蓝色虚线的圆弧是长度为l的CR中心线,l1~l4为驱动线的长度,ϕ为圆弧沿着+z方向的旋转角度,表征圆弧的空间位姿,θ为圆弧角度,r为圆弧半径,并且l=rθ;图6(d)是沿着z轴负方向对xy平面的俯视图,其中弯曲方向的投影就是图6(c)中蓝色虚线即圆弧中心线在xy平面内的投影。其中,图6(a)和图6(b)用来求解逆运动学的几何学部分,图6(c)和图6(d)用来求解逆运动学的线长部分。
对于第(1)部分几何求解(图6(a)和图6(b)),CR末端笛卡尔空间位置和CR圆弧几何参数的关系如式(1)所示:
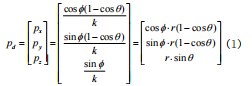
其中,向量pd是期望的笛卡尔空间位置,由主手输入得到。根据公式(1),首先可以得到图6(c)中相对于基坐标系z轴的旋转角ϕ的值如式(2)所示:

接下来需要计算r(1-cosθ)的值,计算公式如式(3)所示:

在上述公式(8)中,当θ<<l,CR的形状几乎是一条直线,从而线长l几乎就是pz的值,这时候的圆弧半径几乎是无穷大,不过因为需要的值是l而不是r,所以此时让r=w,不影响逆运动学的结果。
以上的公式(1)到(8)求解了CR逆运动学的第一部分,即圆弧几何部分。下面进行逆运动学第二部分的求解,也就是拉线部分的求解(图6(c)和图6(d))。
从图6(d)可以得到CR中心圆弧的长度r和每根拉

由公式(12)计算出来的结果就是CR逆运动学的结果,驱动结构会利用此结果来驱动线长。
4功能展示
在完成一套主手,连续体柔性臂及黏膜切开刀的设计开发后,通过主从映射系数的设置确认,可以在ROS平台上建立起主从控制。
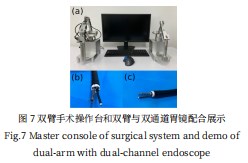
如图7所示通过力反馈主手控制柔性臂的运动,控制夹钳开合,上下左右摆动及前后伸缩,同时通过无动力主手控制黏膜切开刀的刀头伸缩,整体伸缩及上下左右摆动。同时柔性臂和黏膜切开刀能够穿过双通道内镜,在胃镜末端进行各姿态的运动,模拟手术场景下的运动,柔性臂夹钳进行病变组织的夹取提拉,切开刀通过高频发生器放电进行切割,两者配合完成相应微创手术操作。
5结论
本文开发了一套手术系统,包括一个力反馈主手,一个无动力主手,一种连续体柔性臂夹钳,一种连续体黏膜切开刀,其中两两完成主从控制,实现2个主手对2个柔性器械的控制,包括各姿态的运动,病变组织的夹取提拉及放电切割。该手术系统未来将能够替代原有的ESD手术方式,由医生远程操作代替手持胃镜持续操作,缩短医生的培训时间,同时减小医生手术时的负荷感,进而将内科手术外科化。后续将逐步完善该系统,通过离体实验,动物实验逐步优化改进,最终完成产品化,推向市场,解决临床医生的痛点,为更多患者带来福音。
参考文献
[1]王建辰.变刚度单孔手术机器人系统设计方法及主从控制策略研究[D].天津:天津大学,2017.
[2]CAMARILLO D B,CARLSON C R,SALISBURY J K.Configuration Tracking for Continuum Manipulators With Coupled Tendon Drive[J].IEEE Transactions on Robotics,2009,25(4):798-808.
[3]ALATORRE D,AXINTE D,RABANI A.Continuum Robot Proprioception:The Ionic Liquid Approach[J].IEEE Transactions on Robotics,2021,99:1-10.
[4]曹燕飞.变刚度微创介入手术连续体机器人研究[D].南京:南京航空航天大学,2019.
[5]冯原.内窥镜机器人驱动单元研究[D].哈尔滨:哈尔滨工业大学,2008.
[6]ROBERTJ.WEBSTER III,JONES B A.Design and Kinematic Modeling of Constant Curvature Continuum Robots:A Review[J].The International Journal of Robotics Research,2010,29(13):1661-1683.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/51296.html