SCI论文(www.lunwensci.com):
摘要:本文展示了一种多自由度黏膜切开刀的开发,该切开刀具有4个自由度,包括三个空间位置自由度和一个刀头伸缩自由度,能够通过6自由度主手进行主从控制。着重阐述了切开刀的结构设计及运动学算法的开发,并通过主从控制进行切开刀的运动验证,以及切割效果的初期实验验证。通过实现以上功能,证明该切开刀能够在手术时对黏膜进行灵活地切割,进而能够作为经自然腔道手术(NOTES:Natural Orifce Transluminal Endoscopic Surgery)的核心工具。
关键词:连续体机器人;手术机器人;手术用电刀;黏膜下剥离;遥操作;经自然腔道手术
A Electrosurgical Knife Based on Continuum Robot
FAN Keshun,CHEN Jianxiao,SHI Guofeng,LIN Liyang,SHEN Luchen
(Shenzhen ROBO Medical Technology Co.,Ltd.,Shenzhen Guangdong 518118)
【Abstract】:This paper demonstrates the development of a robotic electrosurgical knife for submucosal dissection.This tool is designed with 4DOF,including 3 translational DOFs for the motion of the knife and 1 translational DOF for feeding the tip of the knife,and is capable of being teleoperated by a 6DOF master manipulator.Mechanical design,kinematics of this electrosurgical knife was illustrated,followed by preliminary experimental validations of the master-slave control and the cutting experiment of the knife.Through the above work,it can be seen that this electrosurgical knife is flexible and capable of performing cutting effectively.Therefore,it can play an important role in Natural Orifce Transluminal Endoscopic Surgery(NOTES)in the future.
【Key words】:continuum robot;surgical robot;electrosurgical knife;submucosal dissection;teleoperation;NOTES
0引言
随着外科手术技术的发展,常规外科手术的弊端,如伤口感染风险高、术后愈合期长、并发症多、伤口创面大等问题,已逐渐引起人们重视,因此微创外科手术在近期有了蓬勃的发展[1]。随着计算机和机器人技术逐渐成熟,微创手术又进一步发展出了单孔介入手术和经自然腔道内镜手术。尽管这两种手术进一步降低了手术对感染的切口创伤,但是其实际功能需求也对技术进步和创新提出了更高的要求。无论哪种微创手术形式,手术时都需要内窥镜及手术工具穿过单一狭窄的创口/通道达到病灶,并且医生根据实时图像,操作末端手术工具的灵活运动,实现切割、灼烧、缝合等操作。而连续体机器人(CR:Continuum Robot)由于其能够做到结构柔性、尺寸较小、运动高灵活性等特征,能够满足微创手术的需求,可以对狭窄腔道内深处位置的病灶进行更好的手术操作[2]。
针对连续体机器人的性能要求,目前已有一些产品问世,比如达芬奇的腹腔镜SP,但是其从动端只有末端是柔性的,且尺寸大,无法进入很多细小腔道。而同时人们也在各类临床术式中进行连续体机器人的探索,如心血管介入[3]、泌尿科[4]、耳鼻喉科、消化道等领域,尽管已经有许多成熟理论对连续体机器人进行建模及控制,但是仍然存在建模偏差,运动迟滞,往返空程,变刚度问题等技术难点需要进一步探究和解决。目前消化道领域暂无成熟的连续体机器人应用,常见的内镜下手术如内镜黏膜下剥离术(ESD)、内镜黏膜下切除术(EMR),均采用手动手术的方式,包括利用手动黏膜切开刀和内镜运动的配合。该方式存在诸多不足之处,如手术难度高且时间较长,对医生训练及操作要求高,切开刀的操作需要额外一名护士协助,同时手术时出血等并发症多。针对消化临床手术的痛点,本文设计开发了一款多自由度连续体黏膜切开刀,能够作为NOTES手术的通用工具。其中,多自由度黏膜切开刀位置的输入来自于多自由度主手端,通过主从控制使该切开刀完成各姿态运动[5],同时配合脚踏控制切开刀的电路导通,实现病灶的切割和止血,完成手术。
本文将首先介绍连续体黏膜切开刀结构的机械结构,随后进行运动学算法及功能展示,最后进行整套结构的总结及展望。
1机械设计
本文选用线驱动(Tendon-driven)的方式驱动连续体切开刀[6]。尽管线驱动不是连续体机器人唯一的驱动方式,但是其他驱动形式或多或少都存在一些局限性以至于无法应用在手术机器人场景中。例如磁驱动需要庞大的外部磁场发生器,气压驱动需要庞大的气压系统,同心管驱动尽管可以做得很小,但无法做到足够细长,因此以上驱动方式均不适合此类场景。同时CR还分为单段(Single-segment)和多段(Multi-segment)[7],多段CR尽管可以有更高的自由度,但是需要更多地驱动拉线及更复杂的驱动单元,结合切开刀的实际运动空间大小,很难做到足够细小[8]。在线数量的选择时,为了实现2个自由度的偏摆,理论上3根线即可实现,但是考虑到对称的结构能够使运动学建模更加直观,4根线仍然是多数系统的首选。综上所述,本文设计的连续体切开刀采用了单节,4根线线驱动结构形式。
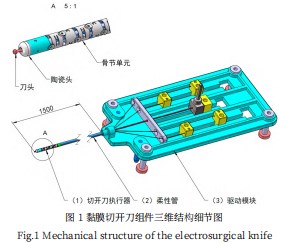
本文的黏膜切开刀如图1所示,整个结构分为三部分:切开刀执行器;柔性管;驱动模块。
(1)第一部分切开刀执行器是手术中和患者交互的部分,外径2.6mm,长度25mm。切开刀执行器中的刀头能够相对陶瓷头运动,伸出时进行病灶的切割或止血,缩进时可以避免误伤其他黏膜位置。陶瓷头固定在一个蛇骨结构上,蛇骨中的各个骨节单元通过铆接固定在一起,每组相邻骨节单元之间能够进行相对摆动,摆动角达到30°。蛇骨结构的驱动通过4根球头钢丝绳完成,均匀分布在蛇骨内侧4个方向上,球头卡在蛇骨端部,钢丝绳另一端通过驱动盒的驱动滑块拉动,进而带动整个切开刀刀头两个方向的偏摆,实现内镜视野下的灵活运动。同时刀头通过弹簧管和驱动钢丝连接,能够保证蛇骨段足够小的刚性,进而能够保证足够的灵活性。
(2)第二部分柔性管为外径2.6mm的聚四氟乙烯管,上述4根球头钢丝绳以及刀头的驱动钢丝均在穿出蛇骨后,包裹着聚四氟乙烯管进入外套管中,聚四氟乙烯管能够显著减小钢丝绳之间的摩擦,同时避免钢丝绳互相搅乱。柔性管的一端和蛇骨结构相连,另一端固定在驱动模块上。
(3)第三部分驱动模块除了和柔性管的固定,同时4根球头钢丝绳分别穿过引线槽上的对应小孔,再穿过对应侧边滑块后,通过铝套进行限位固定。此外,中心的驱动钢丝穿过引线槽后,在先穿过导电柱后,再穿过中间滑块,分别完成固定。
除了结构本身,考虑到高频发生器连接后,切开刀执行器对黏膜的意外灼烧伤害,应当对蛇骨,弹簧管及驱动钢丝的前段进行绝缘处理,保护人体。此外刀头应该进行抗氧化处理,避免在放电切割中迅速氧化,切割能力下降,影响手术效率。在实际操作中,先将高频发生器和导电柱之间用专用接口相连,通过多自由度主手控制驱动单元的运动,进而带动各个滑块的运动,控制钢丝绳的拉紧和放松,实现刀头伸缩及蛇骨两个自由度弯曲的功能,此外驱动单元具有整体前后移动的功能,能够带动切开刀完成前后进给,而脚踏能够控制高频发生器的电路导通,进一步控制刀头的放电时机,顺利完成病灶的切除。
2运动学算法
2.1主手运动学
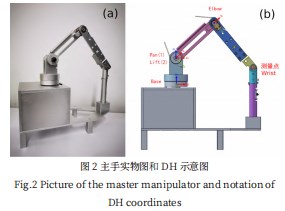
本文中将使用6自由度主手对黏膜切开刀进行主从控制演示。其机械结构和运动学建模如图2所示。其中前3个自由度配置有电位计用于读取关节信息,可用于计算测量点的运动学位置。后3个自由度没有配置电位计,其关节角度不用于计算运动学,但是可以提供人手操作时的舒适性和灵活性。在主手握把处安装有一个按钮用于激活黏膜切开刀的主从控制和刀头伸缩。
本文采用改进版DH建模法对主手进行运动学建模。根据坐标变换原理,测量点坐标系Twrist相对于Tbase的坐标变换可表示为如式(1)所示:

最终从基坐标到测量点坐标的变换矩阵可表示为如式(2)所示:
Twrist是属于SE(3)空间的一个坐标变换。其中位置向量[px,py,pz]T将作为主从控制中的位置输入。
如图2(a)所示为主手实物图;如图2(b)所示为主手DH坐标系示意图,其中基坐标系Base所在处的坐标系被定义为Tbase;前3个关节的名字分别为:Pan,Lift,Elbow,测量点处的坐标系命名为Wrist;相应的,每个坐标系的变换矩阵定义为Tpan,Tlift,Telbow,Twrist。
2.2柔性臂运动学
本文使用基于线长的常曲率(Constant Curvature)模型[9]来描述CR的运动学。
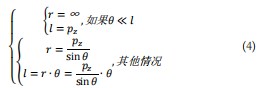
对于常曲率模型CR的逆运动学求解,可以分成两个部分:(1)CR几何部分的求解(图3(a)、图3(b)),解决从笛卡尔空间到CR圆弧几何参数的映射;(2)拉线部分的求解(图3(c)、图3(d)),解决从CR几何参数到拉线长度的映射。
对于第(1)部分几何求解(图3(a,b)),从[9]中得到CR末端笛卡尔空间位置和CR圆弧几何参数的关系如式(3)所示:
其中,向量pd是期望的笛卡尔空间位置,由主手输入,并由公式(2)计算得出。
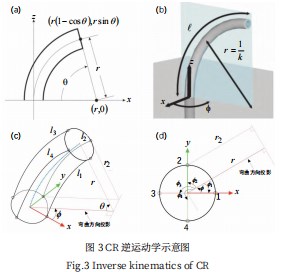
从公式(3),线长l可以计算如式(4)所示:
在上述公式(4)中,当θ≪l,CR的形状几乎是一条直线,从而线长l几乎就是pz的值,这时候的圆弧半径几乎是无穷大,不过因为需要的值是l而不是r,所以此时让r=∞,不影响逆运动学的结果。
图3(a)是当旋转角ϕ为零时,CR在xz平面内的弯曲;图3(b)是当旋转角ϕ不为零时,CR曲线的示意图,其中的参数包括线长l、曲率k、半径r=l/k(图3(a)、图3(b)来自于[9]);图3(c)是四根线驱动的CR的圆弧弯曲示意图和各参数示意图:蓝色虚线的圆弧是长度为l的CR中心线,l1~l4为驱动线的长度,ϕ为圆弧沿着+z方向的旋转角度,表征圆弧的空间位置,θ为圆弧角度,r为圆弧半径,并且l=θ·r;图3(d)是沿着z轴负方向对xy平面的俯视图,其中弯曲方向的投影就是图3(c)中蓝色虚线即圆弧中心线在xy平面内的投影。其中,图3(a)、图3(b)用来求解逆运动学的几何学部分,图3(c)、图3(d)用来求解逆运动学的线长部分。
以上的公式(3)到公式(4)求解了CR逆运动学的第一部分,即圆弧几何部分。下面进行逆运动学第二部分的求解,也就是拉线部分的求解(图3(c)、图3(d))。
结合[9]及公式(4),可以得到如式(5)所示的线长公式:
由公式(5)计算出来的结果就是CR逆运动学的结果,驱动结构会利用这个结果来驱动线长。
3功能展示
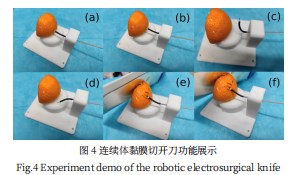
在完成主手和切开刀执行器的系统开发之后,通过主从映射系数的设置,可以建立起主从控制,通过主手控制黏膜切开刀的摆动,前后移动及刀头的伸缩运动。为验证本文所开发的黏膜切开刀的运动性能及切割效果,在此展示一个联调试验:将切开刀穿过双通道内窥镜的小工具通道,通过主手控制其运动,进行刀头伸缩,摆动,及在踩动脚踏对橙子表皮进行放电切割测试,完成切割后将刀头收回。以上动作的完成验证了黏膜切开刀具有:灵活摆动自由度、刀头伸缩自由度、前后进给自由度、准确的主从控制及良好的绝缘性,从而证明了自研的主从控制柔性连续体切开刀的功能。
图4(a)展示了连续体黏膜切开刀伸出时的自然状态;图4(b)展示了连续体黏膜切开刀刀头伸出时的状态;图4(c)和图4(d)展示了连续体粘膜切开刀在不同方向的摆动;图4(e)和图4(f)展示了连续体粘膜切开刀对橙子表皮的放电切割效果。
4结论
本文开发了一种主从操作的连续体黏膜切开刀,并进行功能展示。通过机械结构的设计及运动学算法的开发,实现切开刀的摆动,前后运动及刀头的伸缩,并且实现了对橙子表皮的放电切割,证明了自研系统的可行性及潜在价值。将来可以针对这款自动化手术器械进行完善,例如进行离题和动物实验验证其安全性和有效性,同时可以调研市场,确认将其改为手动形式的可行性及市场价值。此外,可以延续该设计思路,开发止血夹,持针钳等其他手术工具,丰富手术的术式,减少医生的操作难度。最后,可以深入研究连续体机器人的建模和误差补偿算法,从而进一步提高控制精度,让手术更高效,更安全。
参考文献
[1]曹燕飞.变刚度微创介入手术连续体机器人研究[D].南京:南京航空航天大学机械电子工程系,2019.
[2]ATALLAH S,SANCHEZ A,BIANCHI E,et al.Envisioning the Future of Colorectal Surgery:Preclinical Assessment and Detailed Description of an Endoluminal Robotic System(ColubrisMX ELS)[J].Techniques in Coloproctology,2021,25(09):1199-1207.
[3]CHAUTEMS C,TONAZZINI A,FLOREANO D,et al.A Variable Stiffness Catheter Controlled with an External Magnetic Field[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).Vancouver:IEEE,2017:181-186.
[4]BURGNER-KAHRS J,RUCKER D C,CHOSET H.Continuum Robots for Medical Applications:A Survey[J].IEEE Transactions on Robotics,2015,31(6):1261-1280.
[5]林华杰.一种连续体并联抓取机器人的设计与研究[D].北京:北京交通大学机械设计及理论系,2019.
[6]杨凯盛.模块化绳索驱动仿生机器人臂刚度特性研究[D].北京:中国科学院大学机械制造及其自动化系,2020.
[7]RAO P,PEYRON Q,LILGE S,et al.How to Model Tendon-Driven Continuum Robots and Benchmark Modelling Performance[J].Frontiers in Robotics and AI,2021,07:630245.
[8]AMANOV E,NGUYEN T D,BURGNER-KAHRS J.Tendon-Driven Continuum Robots with Extensible Sections—A Model-based Evaluation of Path-following Motions[J].The International Journal of Robotics Research,2019,40(01):7-23.
[9]WEBSTER R J,JoONES B A.Design and Kinematic Modeling of Constant Curvature Continuum Robots:A Review[J].The International Journal of Robotics Research,2010,29(2):1661–1683.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/49941.html