SCI论文(www.lunwensci.com):
摘要:本文展示了一个主从操作的连续体机器人(CR:Continuum Robot)系统的开发。此系统主要包括主手部分和CR从手部分。主手是具有六个自由度的串联式结构;从手的CR具有五个自由度,包括三个空间位置自由度、一个旋转自由度和一个夹钳开合自由度。着重阐述了主手的设计、从手端CR模块的设计和CR运动学算法的开发,并进行了主从控制的初期实验验证。通过这些功能的实现,该主从操作的柔性机器人将来可以成为经自然腔道手术(NOTES:Natural Orifice Transluminal Endoscopic Surgery)的重要工具。
关键词:医疗机器人;连续体机器人;主从控制;遥操作;经自然腔道手术(NOTES)
A Continuous Robot with Master-slave Operation
CHEN Jianxiao,SHEN Luchen,SHI Guofeng,LIN Liyang,FAN Keshun
(Shenzhen Robo Medical Technology Co.,Ltd.,Shenzhen Guangdong 518118)
【Abstract】:This paper demonstrated the development of a teleoperated Continuum Robot(CR)system.The system mainly consists of two parts:The master manipulator,and the slave manipulator(CR).The master manipulator is an articulated structure with 6 degrees of freedom(DOF),while the slave manipulator(CR)consists of 5-DOF,that is,3 translational DOF,1 rotational DOF,and 1 DOF for controlling open/close of forceps.The deign of master manipulator,slave manipulator(CR),and development of CR kinematics were illustrated in this paper.In the end,the master-slave control was validated by preliminary experiments.Through above work,the teleoperated CR can play a significant role in Natural Orifice Transluminal Endoscopic Surgery(NOTES)in the future.
【Key words】:medical robot;continuum robot;master-slave control;teleoperation;NOTES
0引言
随着机器人技术的大规模普及,各种形态的机器人都层出不穷。近年来,CR在工业界和学术界都受到越来越多的关注。跟传统的刚体关节式机器人相比,CR具有诸多优势[1]。因此,在各行各业中,CR的应用越来越广,用来完成传统刚体机器人无法完成的任务。
在各种手术机器人的场景下,CR的应用近年来尤其广泛。CR可以经人体自然腔道进入,完成一些刚性机器人无法完成的手术。人们在各种临床术式中都进行了CR应用的探索,如心血管介入,肺部和气管、消化道、泌尿、神经外科、耳鼻喉、肾结石、腹腔镜机器人(如达芬奇SP)等。
现在已经存在一些柔性机器人的技术,比如达芬奇的单孔腹腔镜SP,但是达芬奇SP只有末端是柔性的,并且尺寸偏大,没法进入很多细小腔道;Intuitive Surgical和Auris都有机器人化的支气管镜[2],但支气管镜是为活检建立一个通道,并没有末端的器械,因此需要的自由度并不是很高。本文目的是开发一个具有足够灵活性的带末端器械的细长CR,可以作为更多NOTES手术下的通用工具。在上述提到的各种基于CR的机器人系统中,核心部件是一个多自由度的柔性机械臂,及一个多自由度的主手,从而实现主从控制。位置的输入来源于主手端的控制[3],CR充当从手端,可以跟随医生的手部动作,完成手术。
本文将主要介绍以下几个方面的内容,首先简单介绍自研的主手,随后进行CR模块的分析和设计,再进行一些功能展示,最后进行整套系统的总结和展望。
1主手
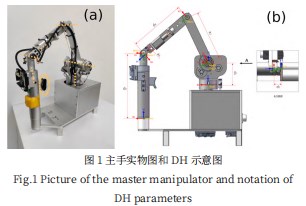
本文开发的主手实物图如图1所示,是一个具有六个自由度的串联式主手。本文的主手采用第4关节Wrist1处(如图1(b)所示)的Twrist1的位置为主手的位置输入。根据空间坐标变换的原理,从Tbase到Twrist1的坐标变换表示为:
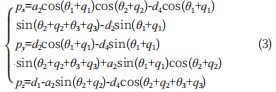
前四个关节角度可以表示为q1,q2,q3,q4,遵循改进版DH(Modified DH)的建模方法[4],最终从基坐标系到第4关节Wrist1坐标系的变换矩阵可表示为:
(a)主手实物图,其中六根虚直线标记出来的是旋转自由度,椭圆虚线圈出来的是开合按钮(b)主手DH参数示意图,其中基坐标系Base所在处的坐标系被定义为Tbase;六个关节的名字分别为:Pan,Lift,Elbow,Wrist1,Wrist2,Wrist3;相应的,在六个关节处的
坐标系被定义为
T是属于SE(3)空间的一个坐标变换。其中位置向量[px,py,pz]T将作为主从控制中的位置输入,计算公式如式(3)所示:
2连续体柔性臂模块
2.1机械设计
本文选取线驱动(Tendon-driven)的方式驱动CR。
线驱动并不是连续体机器人的唯一驱动方式,比如存在磁驱动的CR,但是磁驱动需要庞大的外部磁场发生器,并且产生的力相对有限,因此常用在驱动连续体导管,而不是手术执行器械;还有气压驱动的CR,但是气压系统过于庞大,因此通常出现在类似于象鼻子的仿生CR上;还有基于记忆合金材料的同心管CR,利用材料的弯曲作为自身形变的来源,不需要额外的驱动元件,所以可以做的非常细小,但是此类CR无法做得太长,此外柔性臂在行进中会处于弯曲状态,无法承受太大的力;目前还存在线驱+磁驱的混合驱动(Hybrid Actuation)的CR,但存在与磁驱动类似的问题:需要外部的磁场发生器。基于各类驱动的利弊,本文选取了线驱动的方式。除了驱动方式,CR还有单段(Single-segment)和多段(Multi-segment)的区别,多段CR能够有更高的自由度和灵活性[5],但需要更多的驱动线和更复杂的驱动单元,很难做的细小。近年来,随着CR研究的井喷,甚至出现了长度可伸缩的CR,但同样地,这种CR很难做得细小。对于线驱动方式,有研究者开发了非直线布局的方式,例如螺旋绕线,但是其力学建模复杂,并且在临床上的实用意义尚不明朗。对于单段CR而言,为了实现想要的自由度,尽管理论上三根线就能实现CR的随意偏摆[5],但四根线的布局仍是多数系统的首选,因为对称的结构使运动学的建模也更加直观。考虑到上述各种系统的利弊,本文设计的CR是一个单节、定长度的连续体,由四根线控制柔性臂的运动。
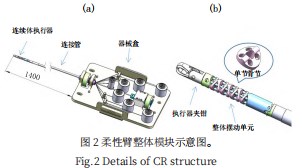
图2(a)是柔性臂整体结构图:连续体执行器,连接管,器械盒;图2(b)是连续体执行器的细节图,包括执行器夹钳,整体摆动单元和单个骨节示意图。本文的柔性臂整体结构设计如图2所示,分为三部分:(1)连续体执行器;(2)连接管;(3)器械盒。
第一部分连续体执行器是在手术区域与患者交互的部分,外径3.5mm,长度26mm。执行器夹钳部分由两片钳口组成,两根钢丝绳固定在钳口两侧,通过拉紧不同钢丝绳,达到钳口张开和闭合的效果。钳口最大张开角度可达90°,能够夹取最大厚度约4mm的病变组织。钳头为鼠齿状,有益于夹取带粘液的组织,防止滑脱。整体摆动单元由7个3D打印的塑料骨节单元组成,每个骨节中间有一个中心孔,用于通过控制钳口开合的两根钢丝绳;中心孔周围均匀分布四个小孔,用于穿过控制偏摆的4根钢丝绳(图2(b))。每根钢丝绳外侧套有聚四氟乙烯管,能够显著减小钢丝绳之间的摩擦力。
第二部分连接管为外径为3.3mm的同步旋转弹簧管,上述提到的共6根包裹着钢丝绳的聚四氟乙烯管,在依次穿过所有骨节后穿入连接管内。连接管能传递扭矩以实现同步旋转,用于控制柔性臂钳头姿态。第二部分连接管的一端与第一部分连续体执行体相连,另一端与第三部分(即器械盒)连接。在柔性臂夹钳使用过程中,可以旋转钳头的开口方向以达到最优夹取位置。6根钢丝绳从同步旋转弹簧管末端穿出,依次连接到6个对应的钢丝绳抱紧座上。通过抱紧座正反周向转动,钢丝绳实现伸长或缩短,进而末端骨节实现偏摆,夹钳实现开合。同时器械盒侧面有简易卡扣用于装配到驱动单元上,易于拆装。钢丝绳抱紧座底部有连接件连接驱动单元上的控制电机。此设计能够在快速拆装的同时,实现扭矩和位置的精确传递。
2.2柔性臂运动学
CR的形态多种多样,运动学模型也随之不同。即使是对于线驱动的CR,运动学也有不同模型。比如有基于线长的运动学模型[5,6],有根据Cosserat Rod理论,基于拉力的运动学模型,还有研究者提出了结合动力学的运动学模型以描述CR瞬态的位置。本文的CR用在手术机器人的场景下,速度相对比较慢,可以当做静态或准静态来对待;并且本文的线驱动是用钢丝,弹性极低,轴向耐拉;基于以上考量,本文使用基于线长的常曲率(Constant Curvature)模型[5]来描述CR的运动学。
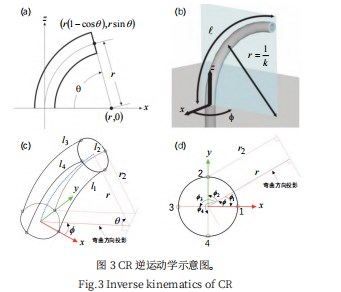
对于常曲率模型CR的逆运动学求解,可以分成两个部分:(1)CR几何部分的求解(如图3(a)、图3(b)所示),解决从笛卡尔空间到CR圆弧几何参数的映射;(2)拉线部分的求解(如图3(c)、图3(d)所示),解决从CR几何参数到拉线长度的映射。
图3(a)是当旋转角ϕ为零时,CR在xz平面内的弯曲;图3(b)是当旋转角ϕ不为零时,CR曲线的示意图,其中的参数包括线长l、曲率k、半径r=l/k(图3(a)、图3(b)来自于文献[5]中的图3);图3(c))是四根线驱动的CR的圆弧弯曲示意图和各参数示意图:蓝色虚线的圆弧是长度为l的CR中心线,l1~l4为驱动线的长度,ϕ为圆弧沿着+z方向的旋转角度,表征圆弧的空间位姿,θ为圆弧角度,r为圆弧半径,并且l=θr;图3(d)是沿着z轴负方向对xy平面的俯视图,其中弯曲方向的投影就是图3(c)中蓝色虚线即圆弧中心线在xy平面内的投影。其中,图3(a)、图3(b)用来求解逆运动学的几何学部分,图3(c)、图3(d)用来求解逆运动学的线长部分。
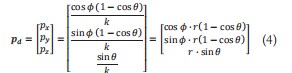
对于第(1)部分几何求解(图3(a)、图3(b)),从文献[5]中的公式(3)得到CR末端笛卡尔空间位置和CR圆弧几何参数的关系是:
其中,向量pd是期望的笛卡尔空间位置,由主手输入,并由公式(3)计算得出。
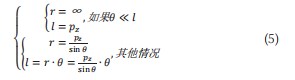
从公式(4)可以计算如下:
在上述公式(5)可知,当θ≪l,CR的形状几乎是一条直线,从而线长l几乎就是pz的值,这时候的圆弧半径几乎是无穷大,不过因为需要的值是l而不是r,所以此时让r=∞,不影响逆运动学的结果。
以上的公式(4)到公式(5)求解了CR逆运动学的
第一部分,即圆弧几何部分。下面进行逆运动学第二部分的求解,也就是拉线部分的求解(图3(c)、图3(d))。
结合文献[5]及公式(5),可以得到如下的线长公式:
由公式(6)计算出来的结果就是CR逆运动学的结果,驱动结构会利用这个结果来驱动线长。
3功能展示
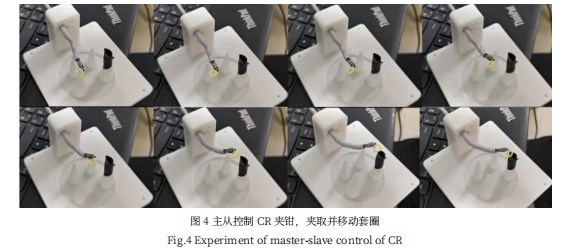
在完成主手和从手CR系统开发之后,通过设置合适的主从映射系数,可以建立起主从控制,通过主手控制末端执行器的偏摆,夹钳开合等运动。为了验证文中所开发的主从控制系统的可靠性,在此展示一个联调实验以证明各个功能模块的性能。具体实验如下:通过主手操控CR,在训练器中夹取一个套圈,将套圈从一个锥形柱移到另一个锥形柱。如图4所示展示了成功完成夹取套圈实验的一系列截图,从一个锥形柱夹取套圈,并且准确移动到另一个锥形柱,然后放下套圈。这些动作的完成验证了夹钳拥有:灵活的偏摆自由度、夹钳开合自由度、准确的主从控制、准确的CR逆运动学。从而初步验证了自研的主从操作CR的功能。
4结论
本文开发了一种主从操作的连续体机器人,并进行了功能展示。通过合理的机械设计和运动学算法的开发,可以实现连续体机器人末端的上下左右偏摆和夹钳的开合功能,并且实现了简单的手术模拟操作,证明了自研系统的可行性和潜力。
将来可以通过几项工作来完善这个系统。首先,可以丰富手术的器具,比如可以开发基于连续体机器人的电刀、止血钳、持针钳等,从而丰富潜在的术式;其次,可以继续深入研究连续体机器人的设计、驱动方式、加工方式等,从而进一步减小机器人的尺寸、增加自由度、提升灵活性;最后,可以深入研究连续体的建模和感知,比如运动学和静力学建模、外力感知,从而让手术更高效、更安全。
参考文献
[1]Ian D Walker.Continuous Backbone"Continuum"Robot Manipulators[J].International Scholarly Research Notices,2013.
[2]REISENAUER J,SIMOFF M J,PRITCHETT M A,et al.Ion:Technology and Techniques for Shape-sensing Robotic-assisted Bronchoscopy[J].The Annals of Thoracic Surgery,2022,113(1):308–315.
[3]TAYLOR R H.Medical Robotics and Computer-Integrated Surgery[J].Springer Handbook of Robotics,2016:1657–1684.
[4]CRAIG J J.Introduction to Robotics:Mechanics and Control,3/E[M].Pearson Education India,2009.
[5]Robert J Webster,Bryan A Jones.Design and Kinematic Modeling of Constant Curvature Continuum Robots:A Review[J].The International Journal of Robotics Research,2010,29(13):1661-1683.
[6]RAO P,PEYRON Q,LILGE S,et al.How to Model Tendon-Driven Continuum Robots and Benchmark Modelling Performance[J].Frontiers in Robotics and AI,2021,7:1-20.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/46807.html