SCI论文(www.lunwensci.com)
摘 要:本文展示了一个机器人系统中具有力反馈 (Haptic/Force Feedback) 功能的遥操作主手的开发。此主手具有七 自由度的串联结构,并集成了多个电机以提供力反馈。通过 ROS(Robot Operating System) 的 Rviz 仿真环境进行了运动学 验证。详述了算法开发过程,如运动学、雅克比矩阵、可操作性、正逆动力学。逆动力学计算的结果可以提供跟力控相关的 功能,如重力补偿。通过以上工作,此主手不仅可以作为遥操作的输入端,而且可以将外界的接触力反馈回主手,使其成为 一个双向遥操作仪器 (Bilateral Teleoperation Device)。因此它可以成为机器人遥操作场景下, 尤其是机器人辅助微创手术 RAMIS(Robot-assisted Minimally Invasive Surgery) 中重要的遥操作工具。
关键词:手术机器人,力反馈,双向遥操作,重力补偿,机器人辅助微创手术
Development of a 7-DOF Teleoperation Manipulator with Force-feedback
LIN Liyang, CHEN Jianxiao, SHI Guofeng, SHEN Luchen, CHEN Long (Shenzhen ROBO Medical Technology Co., Ltd., Shenzhen Guangdong 518118)
【Abstract】: This paper demonstrated the development of a teleoperated master hand with the function of Haptic/Force Feedback in a robot system . Designed with 7 degrees of freedom (DOF), this serial manipulator has multiple motors integrated to provide force-feedback. Rviz simulation environment in ROS(Robot Operating System) was utilized to verify the kinematics of this manipulator. Algorithms, such as kinematics, Jacobian matrix, manipulability, forward/inverse dynamics were detailed. The inverse dynamics can be used to achieve functionalities related with force- feedback, such as gravity compensation. With the above work, this manipulator can serve as the input in teleoperations, and provide haptics feedback, making it a Bilateral Teleoperation Device. Therefore, it can play an important role in robotic teleoperation, especially in Robot-assisted Minimally Invasive Surgery (RAMIS).
【Key words】: surgical robot;force feedback;gilateral teleoperation;gravity compensation;robot-assisted minimally invasive surgery (RAMIS)
引言
随着机器人技术的普及和通讯设施的发展,各行各 业中使用遥操作机器人的场景也越来越多 [1]。
近些年, 随着医疗器械行业的发展, 遥操作主手在 手术机器人领域的应用尤其广泛。越来越多的主手被开 发出来作为微创手术中的遥操作仪器 [2] ,配合完成机器 人辅助微创手术 RAMIS,带来诸多好处。
目前已经存在一些商用的带力反馈的主手,比如 3D Systems 的 Touch,也就是曾经的 Phantom Omni,Force Dimension 的 Omega 和 Sigma 系列;Novint 的 Falcon。
然而,现有的带力反馈的主手通常价格昂贵,而且上述 提到的产品都是国外的进口产品。因此自主开发带力反 馈的主手的另一个意义是实现高端医疗仪器国产化,提 升中国智造的实力。
本文将从以下几部分展示主手的开发,包括主手的 机械设计、仿真验证、算法开发、功能验证,最后进行 总结和展望。
1 机械设计和仿真
1.1 三维模型
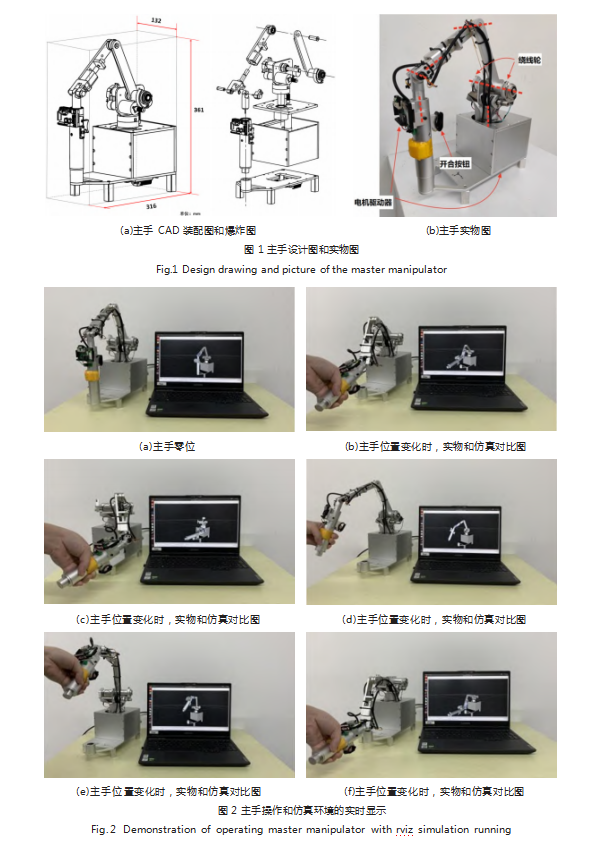
由于本文开发的力反馈主手目标场景是机器人手术,不需要高速的运动,因此串联式结构成为了选择。带来 的好处是工作空间更大且易于分析,运动学和动力学的 建模直观。设计的主手 CAD 模型如图 1(a)所示。
从图 1(b)中可以看到,主手有 7 个自由度,包 括 6 个旋转和 1 个夹钳开合。在下文的主从运动计算 中,使用的是第 4 关节处的位置。在第 4 关节位置确 定的情况下,主手握把依然可以转动,给使用者的手部 运动带来灵活性。前 3 个关节集成了电机,这三个电机 不仅可以提供编码器的读数来确定角度,也可以产生力 矩,提供力反馈;后 3 个关节没有主动力,由电位计读 取角度。主手的握把位置有一个开合按钮,也集成了电 机,不仅能够控制从手末端夹钳的开合,还能够反馈从 手端感应到的夹持力,使得主手操作者不仅拥有接触力 反馈还具有夹持力的感知。相比于很多只具有接触力感 知的主手来说,本文的主手拥有多一个维度的感知。如 此一来,医疗器械中的夹持力 ( 如缝针中的力 ) 在未来 可以被感知到。
1.2 运动仿真
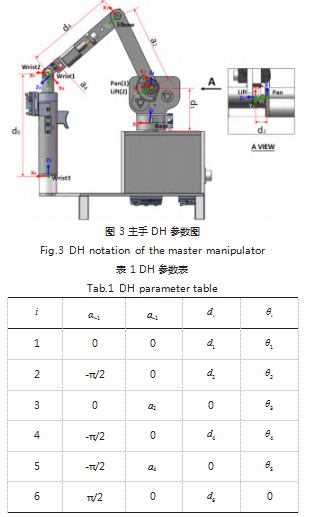
前一部分展示了主手的结构设计,本节将展示仿真 验证。这不仅给机器人提供了一个仿真环境,而且可以 验证主手的实时通讯是否通畅。这里采用机器人操作系 统 (Robot Operating System – ROS) 作为仿真和调试的 平台。ROS 可以读取 URDF 中所有关于机器人的信息, 并可以将机器人显示在 Rviz 的仿真环境里,如图 2(a) 所示。并且,在建立了通讯之后,各个关节的实时角度 信息都可以读取到 PC,并且发送到 ROS 相应的信息节 点 (Topic) 上, 在 Rviz 里面实时显示出来。如图 2(b)- 图 2(f) 所示,握住主手的握把随机变化几个位姿,在 Rviz 仿真下的主手位姿都跟真实的主手位姿一致。这 不仅验证了仿真环境的真实性,也说明得到的关节角度 信息是实时准确的。
2 算法开发
上面章节介绍了主手的设计和搭建。本章节介绍关 于主手的算法开发工作,包括运动学、动力学。运动学 可以提供主手的位置信息,在主从操作中可以作为从手 的位置输入。动力学 ( 包含正动力学和逆动力学 ) 可以 提供主手的运动和力 / 力矩之间的关系。
2.1 运动学和运动空间
2.1.1 DH 建模
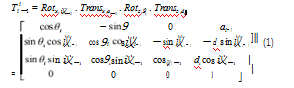
本文采用改进版 DH(Modifie DH)对主手进行运 动学建模 [3] ,用 4 个参数 αi-1 , ai-1 , di ,θi 表示相邻坐标 系的空间变换。如图 3 和表 1 所示展示了主手的坐标系 和 DH 参数。其中基坐标系 Base 所在处的坐标系被定义为 Tbase;6 个关节的名字分别为:Pan, Lift, Elbow, Wrist1. Wrist2. Wrist3; 相应的,在 6 个关节处的坐标 系被定义为 Tpan , Tlift , elbow(T), Twrist1 , Twrist2 , Twrist3;a1 , a2 , a4 , d ,,d4 , d6 为对应的 DH 参数。
注:在本文的主手中 d1=0.061.θ1=0.0017044.d2=0.0142. θ2=-1.1304.a2=0.135.θ3=0.27648.d4=0.1528.θ4=π,a4=-0.005. θ5=-2.4248.d6=-0.178.其中,长度和角度的单位是米和弧度。
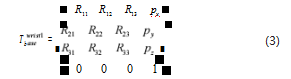
当用改进版的 DH 建模, 在连杆零位的时候,从第 i-1 坐标系到第 i 坐标系可以表示成如公式(1)所示:
从公式(1)可以看出来,从 i − 1 坐标系到 i 坐标 系的空间变化由以下四步顺序组成:(1)沿着前一个坐标系 x 的旋转;(2)沿着前一个坐标系 x 的平移;(3) 沿着本坐标系 z 的旋转;(4)沿着本坐标系 z 的平移。 本文的主手采用第 4 关节 wrist1 处的 Twrist1 的位置为主手 的位置输入。考虑到关节角度 q1 , q2 , q3 , q4 ,从 Tbase 到 Twrist1 的坐标变换如公式(2)所示:
最终从基坐标系到第 4 关节 Wrist1 坐标系的变换矩 阵可表示如公式(3)所示:
是属于 SE(3) 空间的一个坐标变换 [4]。
第 4 关节原点相对于基座标原点的笛卡尔空间坐标 可表示为 ■px py pz ■T ,其中
px = a2 cos(θ1 + q1 ) cos(θ2 + q2 ) − d4 cos(θ1 + q1 ) sin(θ2 + q2 +θ3 + q3 ) − d2 sin(θ1 + q1 )
py = a2 cos(θ1 + q1 ) − d4 cos(θ1 + q1 ) sin(θ2 + q2 +θ3 + q3 ) + a2 sin(θ1 + q1 ) cos(θ2 + q2 )
pz = d1 − a2 sin(θ2 + q2 ) − d4 cos(θ2 + q2 +θ3 + q3 )
2.1.2 可操作性
对于本文的主手,在零位时(如图 3 所示),关节 Wrist1 处计算雅克比矩阵的线速度分量,得到如公式(4) 所示:
Awrist 1 = Jwristv1 (Jwristv1 )T 。所以, 条件数(Condition Num- ber)的计算如公式(5)所示:
从公式(5) 看出, 条件数在一个合理的数值, 说 明此操作点不会有发生奇点的风险,不会影响主手操作。
2.2 动力学
对于机械臂这种关节式的多连杆系统,动力学的公
式通常可以写成如公式(6)所示 [5]:
其中, q 是拉格朗日力学中的广义坐标,在这里也 就是关节的角度;M(q) 是惯量矩阵,通常是一个正定 的对称矩阵;C(q, q.)q. 这一项表征的是离心力和科里奥利力;g(q) 是势能的梯度,当这个势能是重力势能的情 况下,这一项描述的就是重力带来的影响;τ 是广义力, 在本文的场景下, τ 就是各关节的力矩。
对于动力学, 根据应用的不同, 又可以分成两种情 况,即正动力学和逆动力学。正动力学关心的是在已知 力(力矩)的情况下,机械臂如何运动,通常在基于动 力学的运动仿真中会用到;逆动力学关心的是用什么样 的力(力矩)可以达到想要的运动,通常会在运动控制 中使用 [5]。
考虑一个简单的应用场景:对主手进行主动重力补 偿。在工业机器人或协作机器人中,当进行拖拽的时候 可以激活重力补偿,使拖动更容易。本文主手的潜在用 途是手术机器人中的遥操作仪器,重力补偿可以使医生 操作主手的负荷大大降低,尤其是长时间的手术中,可 以减少疲劳。当只考虑静态下的重力补偿的时候,速度 和加速度为 0.各关节需要施加的力矩可以描述为如公式(7)所示:
g(q) = τ (7)
公式(7)可以看成是公式(6)的一个特殊情况, 也就是..和q. 都为 0.考虑到本文中的主手是作为遥操 作仪器在机器人手术中使用,而手术中人手的运动通常 非常缓慢,所以q..和q. 为 0 也是一个合理的假设。
2.3 软件框架
如图 4 所示为主从控制程序运行期间的 ROS 框架, 两台主手分别发布相应的角度关节信息给柔性臂夹钳 / 切开刀,从而实现主手对柔性臂的主从控制。整套主手 的控制程序依据此逻辑进行编写,通过 C++ 语言,进 行角度关节信息的处理及逻辑运算,进而发送位置信号 和姿态信号指令给从动端,完成主从控制。
3 功能验证
在前一部分,列出了动力学的公式并提到了逆动 力学中的一个特殊情况,即重力补偿。本文将在实验 中验证重力补偿的效果。对于主手各个连杆的质量和 质心,可以由 SolidWorks 建模中的理论计算而来,这 个信息也包含在了导出的 URDF 文件中。电机的力矩 / 电流可以控制,加上关节的角度可以由编码器 / 电位 计实时测量,因此公式(7)需要的所有信息都已经具 备,可以用来计算重力补偿所需要的扭矩。由于串联式 机器人有一些已经成熟的函数库去描述机器人的运动学 和 动 力 学, 本 文 采 用 RBDL(Rigid Body Dynamics Library) [6] 来辅助进行逆动力学的计算。当主手的参 数准确的时候,比如主手连杆的惯量准确、电机力矩准 确,激活重力补偿可以让主手悬停在想要的位置而不会 落下。经过实验验证,重力补偿功能可以成功。在实际 的机器人辅助微创手术中,激活重力补偿可以减小医生 长时间操作的疲劳,从而增加手术的安全性。
4 结论
鉴于主从操作的广泛应用,本文成功开发出了一个 七自由度的串联式遥操作主手。完成了机械设计和仿 真,运动学和动力学算法的应用开发,成功完成了初步 的重力补偿功能验证,证明了自研主手的可行性。未来 可以有几个工作可以更加完善这个主手。首先,可以测 量主手末端或肘部的位置,从而实验验证主手的位置精 度,并且可以通过标定来改善位置精度,弥补机加工的 带来的尺寸误差。其次,可以使用力传感器测量力反馈 的精度,从而保证使用者的力反馈体验。最后,这个主 手可以和手术机器人的从手联系起来,实现真正的主从 控制的实验验证。
参考文献
[1] SHEN Y,GUO D J,LONG F,et al.Robots Under COVID-19 Pandemic:A Comprehensive Survey[J].Quality Control,Transactions,2021.9(1):1590-1615.
[2] TAYLOR R H,MENCIASSI A,FICHTINGER G,et al . Medical Robotics and Computer-Integrated Surgery[M]. Heidelberg:Cham:Springer International Publishing,2016: 1657-1684.
[3] CRAIG J J.Introduction to Robotics:Mechanics and Control[M].3/E.India:Pearson Education,2009.
[4] LYNCH K M,PARK F C .Modern Robotics[M].New York:Cambridge University Press,2017.
[5] SPONG M W,HUTCHINSON S,VIDYASAGAR M.Robot Modeling and Control[J].IEEE Control Systems Magazine, 2006.26(6):113-115.
[6] FELIS M L .RBDL:An Efficient Rigid-body Dynamics Library Using Recursive Algorithms[J].Autonomous Robots, 2017.41:495-511.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/53208.html