SCI论文(www.lunwensci.com):
摘要:针对临近空间高超声速飞行器的探测需求,本文提出一种反高超声速目标跟踪制导雷达系统设计方案,并对系统中涉及的关键技术和相应瓶颈问题进行梳理,针对凝视探测、长时间积累、高速机动目标跟踪、高速机动目标轨迹预测等,本文基于子阵级数字波束形成、Keystone变换、交互多模型滤波、以及状态滤波结合知识辅助方法给出工程上的解决方案。
关键词:高超声速目标;跟踪制导雷达;目标检测;目标跟踪;轨迹预测
Research and Design on Key Technology ofAnti Hypersonic Target Tracking Radar
LIU Yang1,QIN Kun2,FANG Ming2,ZHAO Chunlei2,TIAN Gege2
(1.The Sixth Military Representative Ofce of the Naval Armament Department in Shanghai,Shanghai 200235;2.Shanghai Aerospace Electronic Technology Institute,Shanghai 201109)
【Abstract】:According to the detection requirements of near space hypersonic vehicle,this paper proposes a design scheme of anti hypersonic target tracking guidance radar system,and combs the key technologies and corresponding bottleneck problems involved in the system.For gaze detection,long-time accumulation,high-speed moving target tracking,high-speed maneuvering target trajectory prediction,this paper is based on subarray level digital beamforming Keystone transform,interactive multi modelfiltering and statefiltering are combined with knowledge aided method to give the engineering solution.
【Key words】:hypersonic target;tracking guidance radar;target detection;target tracking;trajectory prediction
0引言
临近空间高超声速飞行器飞行高度高、速度快、具有较强突防攻击能力,正成为世界各军事强国谋求空天优势、抢占临近空间战略制高点的重要武器[1]。一些军事强国已经研发成功X-51A、HTV-2、AHW等试验样机,并开展一系列飞行试验。随着科技发展,这类武器将是主宰未来战争成败的重要因素,将是我国国土安全面临的现实威胁。
临近空间高超声速飞行器具有一些不同于常规飞行器的特点:
(1)飞行高度集中在20~40km范围,飞行速度高达5~15Ma,机动能力强、打击距离远;
(2)雷达目标特性微弱,隐蔽性高且突防能力强;
(3)在临近空间飞行过程中,对电磁波吸收衰减能力很强。
临近空间高超声速飞行器的这些特点使得传统的跟踪制导雷达面临严重挑战[2]:
(1)高超声速飞行器高速度和大机动的优势将大大降低雷达发现概率和发现距离,导致系统探测性能急剧下降;
(2)发现目标、跟踪难度大。对超高声速目标,需要连续地稳定探测跟踪,若雷达系统数据更新率过长,将无法获得连续航迹,也就无法实现跟踪;
(3)高超声速飞行器包裹着等离子鞘套飞行,降低被探测发现的概率。
针对上述问题,本文探讨了反高超声速目标跟踪制导雷达系统设计,对系统总体架构、关键技术和难点及其解决途径进行分析。
1反高超声速目标跟踪制导雷达系统架构
反高超声速目标跟踪制导雷达系统可采用如图1所示的“数字化高集成有源阵面+高性能计算”的设计架构,硬件和软件均采用开放式结构,按照原理功能划分由天线分系统、数据传输分系统、信号处理分系统、频率源分系统及显示控制分系统等组成,并且通过射频前端等资源的共用与复用,使雷达同时具备电子侦察、搜索、跟踪、识别及制导等功能。
天线阵面接收目标回波,经T/R组件低噪放大、混频器混频滤波后得到中频信号,并传输至数字处理板卡,完成模数转换及直接数字下变频,得到数字基带信号,再由光纤传输至信号处理组合。基带数据先利用校正系数做通道校正处理,再进行自适应波束形成,最后在每个波束内完成目标探测、距离和角度信息测量等处理,实时处理不同任务的不同波形。在雷达工作模式下,信号处理器生成的点迹数据送给数据处理器,由数据处理模块完成目标航迹处理。
2关键技术
雷达在探测高超声速目标时会出现三跨问题,即“跨波束”“跨距离单元”“跨多普勒单元”,造成雷达探测性能急剧下降。另外,该类目标横向机动范围大,机动模式复杂,传统基于固定模型的跟踪滤波算法基本失效,导致雷达系统很难对其进行稳定跟踪。针对三跨问题,探测制导雷达可采用凝视探测模式和基于快速Keystone变换的高速高机动目标检测技术实现凝视相参积累,采用交互多模型(IMM)算法,通过利用多个运动模型实时拟合实际运动,实现稳定跟踪。
2.1凝视探测
为解决“跨波束”问题,可采用凝视探测模式,利用数字阵列波束控制灵活的特点,发射单个宽波束覆盖所指定的探测视场,接收时则形成多个不同指向的窄波束覆盖该视场,一旦有目标进入即可被探测、定位和跟踪,达到对不同目标和环境的匹配,最大限度发挥探测效能。
对于大规模相控阵,受硬件成本和运算时间成本限制,工程上往往采用子阵级DBF技术,先对子阵内的各阵元通道做模拟合成,再在子阵级对各数字通道进行加权合成。为同时形成多个接收波束,阵元级模拟加权一般直接将波束指向多波束的中心方向,加权向量由该方向对应的M×1维阵列导向矢量给出(M为阵元数),即
wele=a(θ0,φ0)
其中,(θ0,φ0)为多波束中心指向的俯仰角和方位角;子阵级数字加权进一步调整各波束的指向,若指向(θn,φn)的第n个波束对应的理想阵元级加权向量为wref(θn,φn),则其对应的Msub×1维子阵级数字加权向量(Msub为子阵数)为
其中,T=T0wele为Msub×M维子阵变换矩阵,T0为同尺寸的子阵形成矩阵,若第m个阵元属于第l个子阵,则T0的第l行、第m列元素为1,否则为0。
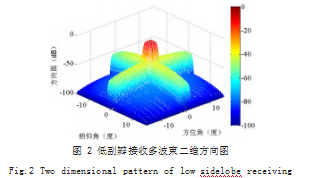
如图2所示给出了基于子阵级DBF技术的多接收波束方向图,其中,阵元数为125×125的均匀矩形阵列被划分为625个5×5单元的子阵,9个接收波束的中心指向阵面法向、理想方向图副瓣水平为-35dB。
可以看到,通过子阵级DBF技术可以灵活地同时形成多个接收波束,实现指定视场的凝视探测。
2.2长时相参积累技术
高速目标检测的主要难点在于:在波束驻留时间内,由于目标具有较高的速度和加速度,导致目前回波复包络存在越距离单元走动现象。
对于匀速直线运动或者加速度不大的高速目标,可以通过Keystone变换或Radon-Fourier变换的方法解决“跨距离单元”问题[3]。具体而言,目标基频回波可写为:
其中,A和p(t)分别为信号幅度和包络,tm=mTr和=t−mTr分别为慢时间和快时间,Tr为脉冲重复周期,R(tm)表示目标在tm时刻的距离。将回波变换至频域,得
其中,P(f)为p(t)的频谱。对于近似匀速运动的目标而言,有R(tm)≈R0+vtm,从而匹配滤波后的频域信号可表示为
其中,=A⋅exp(−j 4πfc R0 c)。为了消除波形的平移,可以定义一个虚拟时间τm,使得fcτm=(fc+f)tm,从而在f-τm平面内等相位线是平行的。Keystone变换即可实现上述尺度变换。而实际应用中,常用Chirp-Z变换快速实现Keystone变换和Radon-Fourier变换等处理。
如图3所示给出了速度为15Ma的高超声速目标的距离-慢时间谱和距离-多普勒谱(信噪比为15dB),在32个脉冲的观测时间内,目标从1000距离单元开始走动了约4个距离单元,在多普勒维也呈现出明显的扩散。如图4所示则给出了基于Keystone变换校正后的距离-慢时间谱和距离-多普勒谱,显然,目标回波的距离走动得到校正,在距离-多普勒谱中也可以获得精确的目标信息。
2.3高速机动目标跟踪
目标运动状态建模是高速高机动目标跟踪的关键,当跟踪滤波中采用的运动模型和目标实际模型不匹配时,会导致跟踪滤波器性能严重下降,甚至失效。为解决该问题,可采用多模型交互逼近以及基于空气动力学的临近空间助推-滑翔弹道模拟方法,通过引入残差反馈信息,根据线性均方误差算法求出各个模型交互的最优权,提高模型预测的准确性,改善目标的跟踪性能。
交互多模型(IMM)算法依靠由输入交互、非线性滤波、模型概率更新、输出综合等步骤构成的迭代实现状态估计,具体而言:
2.3.1状态估计的输入交互
记从模型i向模型j的转移概率为tr,交互后第j个滤波器在k时刻的输入为:
其中,

为模型概率向量,Xˆj(k−1|k−1)(j=1,2,…,N)为第j个滤波器在k-1时刻的输出。进一步定义

、

,则状态误差协方差矩阵可写为:
2.3.2非线性滤波
将状态向量

及其误差协方差矩阵Poj(k−1|k−1)、传感器在k时刻的量测向量Z(k)一起输入第j个滤波器,可基于非线性卡尔曼滤、粒子滤波(PF)、概率数据关联(PDA)、或概率假设密度(PFD)等算法进行滤波,得到第j个滤波器在k时刻的输出为Xˆj(k|k)和Pj(k|k)。
2.3.3模型概率更新
若模型j在k时刻的新息为S,并假设其服从正态分布,则模型j的可能性可表示为:
从而模型j的概率可更新为:
2.3.4状态估计的输出交互
利用各滤波器在k时刻的输出和其对应的模型概率得到k时刻的交互式输出为:
其中,,。
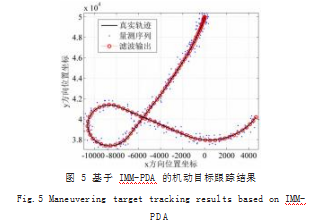
如图5所示以二维情形为例给出了基于上述方法的高速机动目标跟踪结果。可以得到,即便目标的运动轨迹极不规则、呈现出复杂机动状态,上述方法仍能稳定跟踪目标。
2.4高速机动目标跟踪
要提高轨迹预测精度,其根本在于充分挖掘量测数据、目标特性、作战样式等情报中的有效信息,结合预测模型和算法推断目标运动的确定性规律,对目标未来的轨迹进行合理外推。随着飞行器的机动性不断增强、机动样式更加复杂,仅通过跟踪滤波和状态外推进行轨迹预测的可靠性显著降低。然而,一方面,再入段飞行环境恶劣,目标的状态参数变化受到限;另一方面,实际作战环境下,可以粗略判断敌方的作战意图,目标动态也因此并非无迹可寻。因此,本系统拟采用基于状态滤波和知识辅助的方法进行高速机动目标长期轨迹预测。具体而言,整个预测过程依靠状态滤波和模型修正、控制规律辨识和作战意图分析两类技术手段如下所示。
2.4.1状态估计的输出交互
为尽可能降低模型失配导致的状态估计性能下降,本系统采用基于IMM框架的跟踪滤波算法,通过模型交互和概率更新对目标的真实模型进行逼近。同时为保证预测精度,IMM框架下的模型集维度也必然显著增加,从而导致运算量的大幅提高。为解决该问题,可以采用基于混合结构的IMM算法,模型集中的固定成分完成真实模型的粗略描述,可变成分则随着IMM的迭代过程与目标状态参数进行自适应优化,以最大限度提升模型描述的准确性,实现精确的状态估计和可靠的预测模型修正。
2.4.2控制规律辨识和作战意图分析
高速机动目标作为作战单元,其运动轨迹受作战任务约束;在对抗场景下,兵力部署、飞行环境等情报信息也可以作为辅助知识,用于分析目标可能的飞行路径和机动模式。因此,实时感知战场态势、推断敌方作战意图,并结合基于深度学习、智能博弈等技术将其转化为有助于修正预测模型的信息,从而有效提升轨迹预测的可靠性。
基于以上技术,可以延长轨迹预测的有效时间跨度、改善预测精度,从而为武器系统赢得更充足的反应时间、提升其拦截能力。
3结语
临近空间高超声速飞行器是当前对空防御面临的重要威胁,其高速机动特性使得基于传统架构和处理方法的雷达探测性能大打折扣。本文基于先进的反高超声速目标跟踪制导雷达系统架构设计,从目标探测、检测、跟踪、预测等多个方面探讨了临近空间目标防御的有效技术途径。研究内容可为高超声速武器的探测预警和反导拦截系统提供设计参考和理论指导。
参考文献
[1]王鹏飞,王光明,蒋坤,等.临近空间高超声速飞行器发展及关键技术研究[J].飞航导弹,2019(8):22-28+34.
[2]易芳.高超声速飞行器分时拦截信息处理问题研究[D].哈尔滨:哈尔滨工业大学,2015.
[3]李小龙.高速机动目标长时间相参积累算法研究[D].成都:电子科技大学,2017.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/37925.html