SCI论文(www.lunwensci.com):
摘要:随着机器人技术快速发展,企业对机器人技术人才要求提高,学生不但要系统掌握机器人基础理论知识,还要具备机器人应用技术创新能力。为了应对这种人才需求局面,高校机器人技术课程改革迫在眉睫。结合“机器人技术与应用”这门课程理论和实践性强的特点,提出理论知识为出发点、虚拟仿真为助力点、开发实践为检验点、六自由度关节型机械臂为主线的“三点一线”的课程改革探索,在层次上三点各有侧重,在授课内容上通过主线贯穿融合,强化理论知识的应用能力,激发学生学习兴趣,该教学模式能够为机器人工程专业的学生培养提供较好的支撑。
关键词:机器人技术;创新能力;人才培养;课程改革
目前,社会各领域对机器人技术人才的需求不断加大,国内高校陆续开设了机器人工程专业[1]。然而原有的课程对机器人技术人才培养针对性不强,课程体系不够系统,即使多年来一直开设了机器人技术课程,但是对学生的机器人理论知识和实践训练不能兼顾[2]。尤其是智能制造的兴起,机器人应用型人才供不应求[3],因此,作为地方高校,机器人工程专业的学生培养应更加注重知识运用能力、设计开发能力和技术创新能力。培养学生成为应用型技术人才关键在于课程改革,以适应新专业的培养目标。关于机器人技术人才的培养研究,学者们提出了很多有意义的思路。魏博等人提出建立机器人控制与交互创新平台,使得学生能够激发创新意识,培养创新思维[4]。吴东等人围绕实验教学、创客教学、竞赛教学和教学评价四个维度构建多维渐进式机器人课程实践教学体系[5]。朱齐丹等人开展了基于“理论引导-兴趣提升-科研实践”的机器人课程教学模式改革研究与实践,探索高素质创新人才培养模式[6]。雷静桃等人通过构建科研与教学共享实验平台,开展项目教学法,培养学生创新思维,训练学生实验技能[7]。这些课程改革在一定程度上提高了学生的培养质量,对于机器人工程专业的学生培养和课程改革有一定的借鉴意义。本文结合重庆邮电大学先进制造工程学院的机器人工程专业学生培养要求,在原有的机器人技术课程基础上,针对应用型人才培养特点,提出“三点一线”的课程改革模式,以理论知识为出发点、虚拟仿真为助力点、开发实践为检验点、六自由度关节型机械臂为主线,采用机械臂实际应用案例引入,经过理论、仿真和实践三步骤,将机械臂的制作成果作为检验学生的手段,该教学模式改革对机器人工程专业的学生创新能力培养方面具有积极意义。
一 机械臂理论知识讲授部分
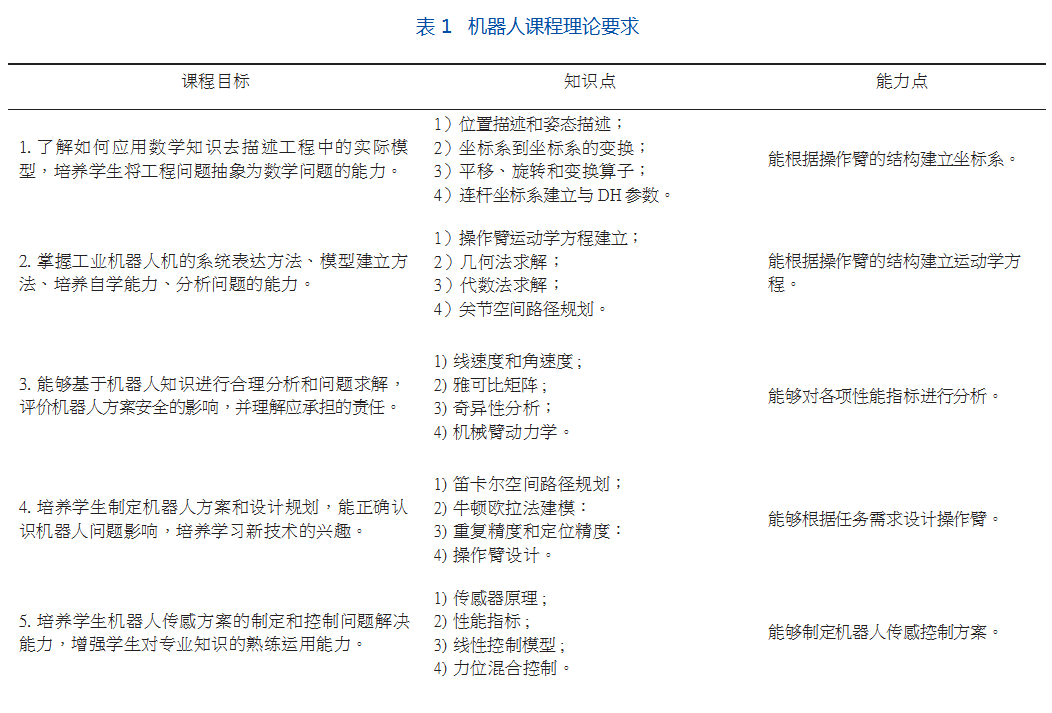
在“三点一线”的教学模式中,机器人基础理论作为学生最先掌握的知识,仅有通过系统的理论知识学习,学生才能深入理解机器人系统,透过机器人产品表面深入挖掘机器人运行机理。根据机器人技术课程将所要讲授的课程划分为五个部分,其中第一部分目标要求学生掌握机械臂的数学描述方法,讲授坐标系变换相关知识,培养根据操作臂的结构建立坐标系的能力。第二部分目标要求学生掌握机械臂的建模方法,讲授运动学建模相关知识,培养能根据操作臂的结构建立运动学方程的能力。第三部分目标要求学生掌握机械臂的分析方法,讲授速度分析相关知识,培养能够对各项性能指标进行分析的能力。第四部分目标要求学生掌握机械臂设计步骤,讲授路径规划相关知识,培养对新型机械臂的设计能力。第五部分目标要求学生掌握机械臂的控制方法,讲授传感器和控制理论相关知识,培养制定机器人传感控制方案能力。如表1所示五部分理论教学内容模块化设计,以及课程目标、知识点和能力点的提出,更加注重知识点的逻辑性和独立性,由浅入深便于学生掌握和学习。
二 机械臂虚拟仿真部分
传统的机器人课程以理论讲授为主,教学内容抽象,不便于学生理解掌握,在理论教学的基础上增加虚拟仿真方面的课程,一方面加深对理论知识的理解,另一方面培养了学生使用计算机软件辅助设计的技能。虚拟仿真可以助力学生从理论知识到实践过程的转变,在这方面的课程安排主要包括三部分内容,第一部分采用三维建模软件,绘制出六自由度机械臂的三维模型并装配,训练学生的绘图能力,在第二部分中将三维模型导入动力学仿真软件,添加约束并仿真分析,使学生更加深入了解机械臂的动力特性,最后设计PID控制器,对机械臂的运动进行仿真,分析响应时间、超调量和稳态误差等控制性能指标。通过仿真课程的学习,学生可以通过计算机软件来强化理论知识,分析机械臂实际问题,验证和展示自己的设计方案。
三、 机械臂开发实践部分
前面的理论教学以老师讲解为主,虚拟仿真部分以学生自学为主,而到了开发实践环节要注重以学生创新能力为主。本阶段的课程要求如表 3 所示, 老师在初始阶段基于应用发布几个主要创新方向, 包括机械臂分拣,机械臂装配和机械臂搬运三个方向,然后学生根据自己的兴趣组队来完成,通过结构设计,硬件电路搭建和软件程序开发等过程,最终完成课程任务要求。本部分最后还包括 PPT 展示, 实物展示和设计报告环节,学生通过 PPT 的讲解锻炼了语言表达能力,通过实物展示锻炼了动手操作能力,通过设计报告撰写锻炼了问题的总结能力。
四 一体化考核方式
机器人技术课程主要讲授臂式机器人的知识,“三点一线”式课程改革模式,以六自由度机械臂应用实例引入,启发学生学习兴趣,课程的理论、仿真和实践部分教学内容都与机械臂密切相关,互不重叠,逻辑清晰,便于学生理解和掌握。本课程的考核成绩按照机械臂理论知识30%,机械臂虚拟仿真30%,机械臂开发实践40%的比例构成。其中理论知识考核采用传统的闭卷答题方式,包括选择题、简答题和计算题等。而虚拟仿真采用上机操作考核形式,主要依据学生软件使用熟练度和仿真结果的正确性来评分。通过前两个阶段学习,学生应该具备了初级的机械臂理论设计和分析能力,最后通过实践环节来检验学生机器人技术开发能力,主要依据作品的创新性,功能的实现度和问题分析的充分性来进行考核。
五结束语
本文结合重庆邮电大学先进制造工程学院的机器人工程专业要求,在原有的机器人技术课程基础上,以应用型人才培养为目标,以理论知识为出发点、虚拟仿真为助力点和开发实践为提升点,以六自由度关节型机械臂为主线,提出“三点一线”的机器人课程改革模式。详细地对机器人技术课程的理论知识要求,虚拟仿真要求和开发实践研究进行设计,通过这种探索性的课程改革,以期望激发学生学习机器人技术的兴趣,夯实机器人系统理论知识,培养机器人技术创新能力。
参考文献
[1]吴文强,朱大昌,江帆,陈从桂,刘镇章.机器人工程专业创新型人才培养方案探索[J].高教学刊,2017(15):43-45.
[2]温玉春.机器人课程教学现状及策略探究[J].工业设计,2017(02):151.
[3]王斌.智能制造背景下地方本科院校应用型人才培养对策[J].教育理论与实践,2018,38(18):9-11.
[4]魏博,邓聪颖,赵杰,张毅.基于机器人控制与交互平台的本科生创新能力培养研究[J].西部素质教育,2018,4(02):66.
[5]吴东,张立敏,张强,孔艺权,彭增焰,曾绍庚.多维渐进式机器人课程实践教学体系构建[J].计算机教育,2018(03):151-154.
[6]朱齐丹.基于“理论引导-兴趣提升-科研实践”的机器人课程教学模式改革研究[C].AEIC Academic Exchange Information Centre(China):International Conference on Humanities and Social Science Research,2018:4.
[7]雷静桃,刘亮,张海洪.“机器人学”课程教学改革与实践[J].实验室研究与探索,2013,32(05):179-182+190.
[8]魏博,赵杰,邓聪颖.浅谈高校机器人教育现状、改革与实践[J].教育现代化,2018,5(06):77-78.
[9]王照信.浅谈数控技术和工业机器人技术的比对学习[J].教育现代化,2018,5(10):160-161+176.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/7271.html