摘要:目前压电执行器在实际工程应用中普遍存在磁滞现象,而磁滞导致的非线性问题给压电执行器的精密控制带来了较大困难;非线性问题的出现给控制器设计带来了巨大的挑战,尤其对于微行程操纵等实验而言更是如此。针对以上问题,以往的各种控制办法没有体现其高效性和灵活性。实验提出了一种新颖的神经网络(Neural Network,NN)与PID组合控制,有效补偿了压电执行器中磁滞的非线性缺陷。在解决PID参数整定过程过于繁杂的问题中,神经网络模型在实际控制起到了优化参数的功能。通过NN和PID的有效组合,压电执行器在运动跟踪过程中表现出了更高的智能化程度和自适应性。仿真结果表明,基于NN的PID组合控制方案可以快速、高效和准确地实现压电执行器的精密运动控制效果。
关键词:Neural Network,NN,PID,压电执行器,仿真,磁滞
0引言
目前,精确的微小行程操作吸引了各个领域的兴趣,例如原子力显微镜[1]和生物细胞微观人工操作[2]等。由于具备快速响应速度和高精度的优势,压电陶瓷执行器[3](PZT)已用于许多应用中,例如生物细胞微注射[4]等。这项研究的目的是解决压电陶瓷的磁滞特性所带来的非线性问题,从而实现压电执行器的精确运动控制。
当前的研究旨在实现微型压电执行器的准确位置跟踪。但是,通过对压电执行器进行开环测试,本实验遇到了一个巨大的挑战:PZT中存在固有的磁滞,这表明系统中存在非线性[5]部分。对存在磁滞效应的系统实现精确控制无疑是一项艰巨的工作;事实证明,许多传统的线性控制技术对此问题的解决都失去了效果。
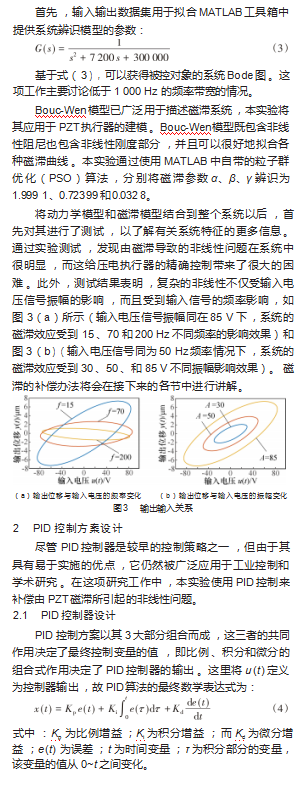
为了实现控制器设计,本实验需要对被控对象进行系统建模;在本实验中,压电驱动的执行器可由Bouc-Wen磁滞模型级联的二阶动力学模型表示[6]。在控制器设计过程中,本实验还需要继续完成系统动力学模型识别和磁滞模型参数识别。在过去的国内外研究中,许多方法已被用来解决由磁滞导致的非线性控制问题,例如滑模控制[7-8]、模型预测控制[9]等。这些方法的应用虽在一定程度上有效地抑制了磁滞现象;但是,基于此类方法的控制器设计过程通常比较耗时,并且补偿精度受已建立模型的准确性的限制。
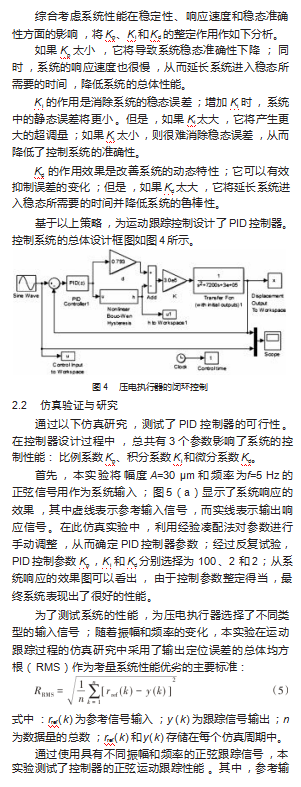
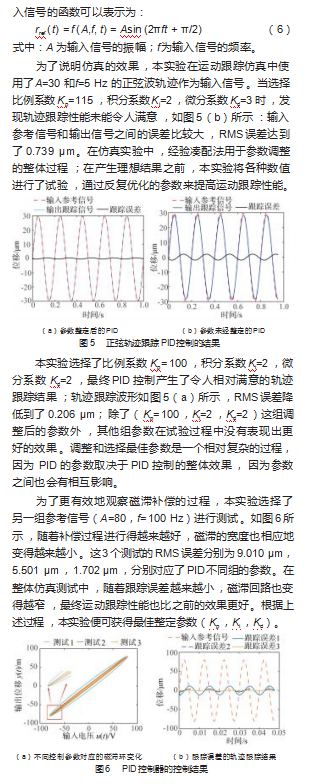
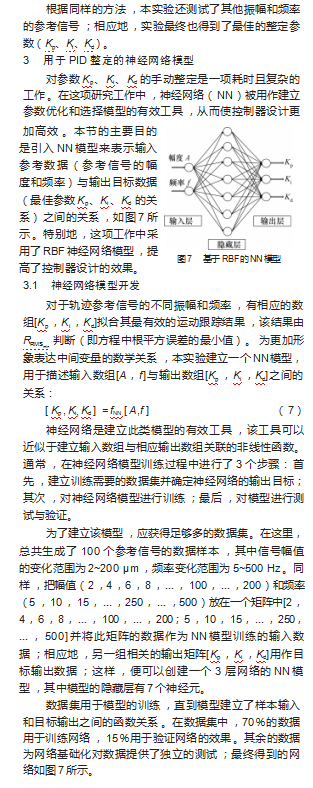
PID控制是一种简单而强大的控制策略,因为它可通过提供反馈信息来解决外部干扰问题和时间延迟等问题[10-11]。在PID算法实现中,比例、积分和微分系数的参数整定是一个比较耗时的过程;经验凑配法通常用于PID参数的整定[12],但是它需要某些先前的经验才能以反复试验的方式方可获得最佳值。为了克服此类问题,在本实验引入了神经网络(Neural Network,NN)方法,以优化PID控制器的控制参数整定的过程,这大大提高了参数整定过程的智能化程度和控制系统的自适应性[13-15]。
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/81399.html