SCI论文(www.lunwensci.com):
摘要:行星齿轮箱复杂的结构和多分量特性会导致其振动信号和频谱异常复杂,而传统的信号处理方法依赖专业人士进行故障特征解释,为此,提出一种全程自动化的故障诊断架构。首先针对故障诊断过程中参数设置对诊断结果影响较大的问题,提出了一种在变分模态分解的基础上建立峭度峰值自适应多敏感分量协同提取特征的自动变分模态分解方法,对行星齿轮箱综合实验平台采集的振动信号进行自适应分解,提取并创建包含部分冗余信息的标准化故障特征向量;然后基于标准化故障特征向量采用卷积神经网络进行训练与智能识别。实验结果表明:提出的方法能够充分发挥变分模态分解与卷积神经网络的优势,训练完成后可以在无需人工设置任何参数的条件下实现行星齿轮箱自动化智能诊断,对太阳轮典型故障的识别准确率可达98.33%。
关键词:行星齿轮箱;变分模态分解;特征提取;自动化诊断;卷积神经网络
Research on Intelligent Fault Diagnosis Method of Planetary Gearbox Based on A-VMD and CNN
Lu Fengqing1, 2, Yue Xia1, 2, Wang Yadong1, 2, Weng Runting1, 2, Zhang Chunliang1, 2※
( 1. School of Mechanical and Electrical Engineering, Guangzhou University, Guangzhou 510006, China;
2. Guangzhou Key Laboratory of Mechanical and Electrical Equipment Condition Monitoring and Control, Guangzhou 510006, China)
Abstract: The complex structure and multi-component characteristics of planetary gearboxes lead to extremely complex vibration signals and spectrum, while the traditional signal processing methods rely on professionals to interpret the fault characteristics, so a whole-process automatic fault diagnosis architecture was proposed. Firstly, aiming at the problem that the parameter setting has great influence on the diagnosis results, a new method based on variational mode decomposition(VMD) was proposed. The automatic variational mode decomposition (A-VMD) method of kurtosis peak adaptive multi-sensitive component cooperative feature extraction was established, and A-VMD was used to decompose the vibration signals collected by the planetary gearbox comprehensive experimental platform . The standardized fault feature vectors containing partial redundant information were extracted and created . Then, convolutional neural networks(CNN) were used for training and intelligent recognition based on standardized fault feature vectors . The experimental results show that the method can give full play to the advantages of VMD and CNN. After training, the automatic intelligent diagnosis of planetary gearbox can be realized without setting any parameters manually, and the recognition accuracy of typical faults of solar wheel can reach 98.33%.
Key words: planetary gear box; variational modal decomposition; feature extraction; automatic diagnosis; convolutional neural network
0引言
行星齿轮箱以承载力大、传递平稳、高效率等特点成为风力发电机的核心传动系统[1]。然而,齿轮箱内部结构和受力情况极为复杂,且是在变工况、变载荷的情况下运行,加之齿轮箱高速级的齿轮和轴承润滑环境较差,更提高了齿轮箱故障发生的概率[2]。因此,对行星齿轮箱的状态进行监测以及故障诊断具有重要意义。
在行星齿轮箱故障诊断中,广泛应用的信号分解方法有小波分析,经验模态分解等。小波变换作为一种时频分析方法,在时域和频域内都具有良好的局部化特性,已被广泛用于行星齿轮箱的故障特征提取[3-8]。但由于小波分解不是自适应的,分解后的各个分量失去了本身的物理意义。针对小波变换的局限性,自适应EMD时频分析方法被应用于行星齿轮箱故障特征提取,去噪及特征提取精度得到一定的改善[9],但存在模态混叠现象以及停止条件缺陷等问题,从而限制了其性能。郑近德等[10]改进的方法EEMD减少了模态混合问题,但白噪声的选择仍然是一个大挑战。
2014年,Dragomiretskiy等[11]提出了一种新的信号处理方法-变分模态分解(VariationalModeDecomposition,VMD)。该方法是一种新的时频分析方法,能够将多分量信号一次性分解成多个单分量调幅调频信号,避免了迭代过程中遇到的端点效应和虚假分量问题。因此,VMD较EMD、EEMD能有效避免模态混叠、过包络、欠包络、边界效应等问题。近些年来,VMD算法在行星齿轮箱故障诊断中得到广泛应用[12-16],例如VikasSharma[17]用VMD算法通过寻找瞬态的峰值对信号进行分解,成功诊断了不同程度的行星齿轮箱故障。但是该方法也存在着不足,例如VMD的分解模数K和惩罚因子都需要依据经验设定,若参数选择不准确,则影响分解性能。
基于时频域分析的信号处理方法一般存在分辨率受限、模态混叠、依赖研究者丰富的专业知识等问题,不适合普通用户使用。随着人工智能的发展,基于深度学习理论的自适应特征提取方法因其所选择的特征适合于被测信号而成为新的研究热点。卷积神经网络由于具有较好的模式识别优势,被广泛应用于故障诊断领域,如Chen等[18]为了实现对齿轮退化状态的监测,提出一种基于奇异谱分解(SSD)与卷积神经网络(ConvolutionalNeuralNetworks,CNN)的齿轮退化状态识别方法。Qiao等[19]为研究不同噪声和载荷下轴承故障诊断问题,提出了一种基于卷积神经网络(CNN)和长短时记忆神经网络(LSTM)的双输入模型。
综上所述,在对行星齿轮箱进行故障诊断时,关键是能够提取反映被监测对象的特征。本文为了实现行星齿轮箱的自动化诊断,建立自动变分模态分解模型(Au‐tomaticVariationalModeDecomposition,A-VMD)对分解后包络信号中的故障特征信息进行自动化提取,创建更全面的故障特征信息,并与卷积神经网络相结合建立从特征提取到智能识别的自动化诊断模型,实现行星齿轮箱故障诊断的全程自动化。
1理论研究
1.1VMD参数优化算法
分解模数K的取值对信号的分解效果影响较大。因此,本文提出一种基于最优峭度峰值确定分解模数的算法对分解参数K进行全局寻优,进而获取与实际信号较为匹配的分解模数K。对任意信号自适应确定分解模数K的算法步骤如下。
(1)设定VMD参数中K的搜索范围。
(2)确定自适应参数。将信号分解后的敏感分量的峭度值ku作为适应度值。对于给定信号x(t),其分解后的峭度值代入下式:
ku=


(xi-

)4 (1)
式中:xi为原始信号经Hilbert变换后的包络。
找出分解后IMF的最大峭度值,即适应度函数为
max{ku} ={ku1,ku2,…,kuj} (2)
式中:kuj为分解模数为u时,第j个IMF的峭度值;ku为分解模数为u时的峭度最大值。
(3)求出峭度最大值的峰值。
Pn=max{k1,k2,…,ku}n≥0(3)
式中:n为峰值个数。
将峰值pn作为寻优过程中的适应度值,目标是寻得全局最优峰值,从而得到最优分解模数。
(4)保存峭度最大值峰值及其所对应的分解模数k。
(5)根据pn确定K值,当n=0时,说明峭度最大值没有峰值,故取k=10,当n=1时,最优峰值为p1,同时得到最优分解模数k。
(6)当步骤4所得的k≤3,且n>1时,最优峰值更新为p2,得到分解模数k,更新最优k值。
1.2基于A-VMD的故障特征提取与创建
A-VMD模型的故障特征提取与创建过程主要分为5个步骤:自适应确定分解模数K、VMD分解、敏感分量选取、包络谱解调、故障特征向量构建。流程如图1所示。

图1A-VMD故障特征提取与创建模型
(1)分解模数K的确定:根据所提出的VMD参数优化算法确定分解模数K,并对信号进行自适应分解。
(2)敏感分量的选取:在对行星齿轮箱进行诊断过程中,故障特征提取还需要对VMD分解所得到的敏感分量进行解调分析。常用的解调方法是选择一个包含最多故障相关成分的敏感子带进行进一步分析,然而大量存在于其他子带的故障相关分量被忽略。因此,本文提出根据峭度值选择故障特征信息明显的多个敏感分量提取包含部分冗余信息的故障特征。
(3)故障特征向量构建:为了保障卷积网络输入的一致性,首先每个敏感分量中均按诊断需求提取n个故障特征频率的幅值作为特征。同时根据预设的敏感分量冗余度m,每个样本均提取统一的m×n个故障特征,共同构成故障特征向量。m和n均为网络训练前通过分析确定的常量,故障识别过程中无需进行设置。
1.3卷积神经网络
卷积神经网络由于在模式识别上有较大的优势,已被广泛应用于故障诊断研究领域。在以往的行星齿轮箱故障诊断识别中,很多学者会截取振动时域图像或者将分解后的所有敏感分量的全部数据点输入卷积神经网络模型中进行训练。然而,数据截取过多时会导致信息冗余,且数据训练时间过长;若数据截取过少又不能涵盖所有信息,导致信息缺失。因此,在保证故障振动信号尽可能丰富的情况下提取数据样本点成为数据预处理的关键。本研究中所提出的A-VMD模型正好解决了此问题,卷积神经网络网络一般含有多层,其中,隐含的卷积层与池化层是卷积神经网络特征提取功能的核心模块,其结构如图2所示。图中,小长形代表特征图,特征图存在于卷积神经网络的每一层中,输入的特征图经过卷积滤波器可得到一个特征图,且每个特征图含有多个神经元。

图2一般CNN结构示意图
2基于A-VMD与CNN的故障诊断方法
基于A-VMD和CNN的故障诊断方法如图3所示。将采集的振动信号通过A-VMD模型提取出具有标准化的特征信息,并将样本数据分为训练集和测试集。首先通过训练样本CNN网络进行训练,并保存训练好的网络模型,现场诊断时直接采用训练好的网络对A-VMD提取的故障特征向量进行分类。
2.1基于A-VMD和CNN的网络结构
在行星齿轮箱故障诊断识别中,保证故障振动信号

图3基于A-VMD和CNN的故障诊断流程
尽可能丰富的情况下提取数据样本点成为数据预处理的关键。A-VMD模型将原始振动信号进行预处理,提取出尽量丰富的故障特征信息再输入网络中进行训练,大大减少了训练时间。如图4所示为A-VMD和CNN的网络结构图。图中,振动信号经过参数自适应的VMD算法分解后,选取多分量进行故障特征提取,将提取后的故障特征向量进行重构,产生样本数据,然后通过卷积神经网络的输入层输入,经过两层池化层和卷积层对特征进行提取,最后由平均池化层和Softmax完成对故障类型和故障程度的分类。
2.2训练网络模型
通过A-VMD模型获取故障特征点以生成样本数据后,从全部训练样本数据中抽取一部分数据进行网络模型的训练,使网络的输出值逐步逼近真实值,每进行一次训练便更新网络模型的偏置以及权重,直到网络参数的误差达到预先设定的迭代次数。结束训练后,网络的结构、参数以及训练时的超参数即为训练的结果,有了这些结果便可依据相应的行星齿轮箱振动信号的情况预测出行星齿轮箱的故障状态。根据故障类

图4A-VMD和CNN网络结构
型搭建的网络模型的各层类别,维度和参数数目如表1所示。

表1故障分类网络模型参数
3实验及结果分析
3.1实验平台
为了验证所提出的行星齿轮箱故障诊断方法在平稳工况下的有效性,本研究采用了SpectraQuest行星齿轮箱故障综合实验平台进行了实验,如图5所示。
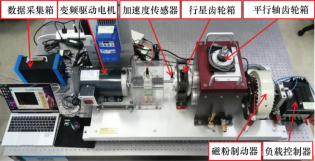
图5行星齿轮箱故障综合实验平台
试验台由变速驱动电机、扭力传感器和编码器、一级行星齿轮箱、平行轴齿轮箱、磁粉制动器、变频驱动控制器、负载控制器和数据采集箱组成。行星齿轮箱输入轴的转速由转速表测量,振动信号由安装在行星齿轮箱上的加速度传感器测量。行星变速箱参数如表2所示。

表2行星齿轮箱参数
在实验中,为了模拟行星齿轮箱各种工作状态,采集4种不同损伤情况下太阳齿轮的振动信号数据。4种损伤状态分别为齿根裂纹、齿面磨损、断齿、齿面剥落,如图6所示。电机输入轴转速固定为1800r/min,磁粉制动器的负载固定为25.6N⋅m,采样频率设置为12800Hz。其中每个样本的采样时间为2s,样本时域信号采样点共25600个。
3.2诊断结果及分析
通过对所提故障诊断模型对齿轮不同故障类型以及不同故障程度的数据集进行多次重复测试。故障分类模

(a)齿根裂纹(b)齿面磨损

(c)断齿(d)齿面剥落图6太阳轮故障类型
型中,采用准确率、误报率和漏报率对模型诊断结果进行评估,如表3所示。
表3A-VMD和CNN模型故障类型诊断结果评估

为了对本文所提故障诊断模型的测试结果进行更为详细地分析,本文引入混淆矩阵对诊断结果进行定量分析。通过混淆矩阵可得到该齿轮类型的确诊、误判的具体情况。图7所示为平稳工况下齿轮故障分类混淆矩阵,每一类故障样本个数为72个。从图中可以得到,该模型对该数据集的综合识别率高98.33%,其中,对正常与故障的识别率为99.72%,对断齿故障的识别准确率为

图7齿轮诊断多类型故障混淆矩阵
94.44%,对齿面磨损故障和齿面剥落故障识别率为100%。断齿故障中有1个漏判为正常齿轮,有3个被误判齿根裂纹故障。由此可以看出,该模型识别准确率较高。
4结束语
(1)针对行星齿轮箱诊断过程中,VMD分解的参数设置对诊断结果影响较大的问题,提出了一种基于峭度峰值的参数自适应寻优算法确定K值,并结合峭度选择多个敏感分量提取故障特征的自动化诊断方法A-VMD;A-VMD不仅实现了参数设置的自适应处理,还获取了更加全面的故障特征信息。
(2)通过A-VMD模型提取并创建包含部分冗余信息标准化故障特征向量,不仅提取了更加全面的故障特征信息,创建了结构一致的特征向量数据集,且更加方便与神经网络的结合。
(3)将不同故障类型的齿轮故障数据输入A-VMD和CNN诊断模型中进行自动化识别。实验结果表明,通过A-VMD和CNN诊断模型能够充分发挥VMD和CNN的优势,实现了无需人工干预诊断便可以对行星齿轮箱进行自动化智能诊断,且对太阳轮典型故障的识别率能达到98.33%。
参考文献:
[1] KHAZAEE M, AHMADI H, OMID M, et al. Feature-level fusion based on wavelet transform and artificial neural network for fault diagnosis of planetary gearbox using acoustic and vibration sig ‐ nals[J]. Insight: Non-Destructive Testing and Condition Monitor ‐ ing , 2013,55(6):323-329.
[2] 陈雪峰, 郭艳婕, 许才彬,等 . 风电装备故障诊断与健康监测研 究综述[J]. 中国机械工程, 2020, 31(2):15.
[3] GUO Junchao,SHI Zhanqun,LI Haiyang,et al. Early Fault Diagno ‐ sis for Planetary Gearbox Based Wavelet Packet Energy and Modulation Signal Bispectrum Analysis[J]. Sensors, 2018, 18(9): 2908.
[4] 祝文颖, 冯志鹏 . 基于改进经验小波变换的行星齿轮箱故障 诊断[J]. 仪器仪表学报, 2016, 37(10):9.
[5] KONG Yun, WANG Tianyang, CHU Fulei. Meshing frequency modulation assisted empirical wavelet transform for fault diagno ‐ sis of wind turbine planetary ring gear[J]. Renewable Energy, 2019, 132.
[6] YI Qin, MAO Yongfang, TANG Baoping, et al. M-band
flexible wavelet transform and its application to the fault diagnosis of planetary gear transmission systems[J]. Mechanical systems and signal processing, 2019, 134(Dec. 1):106298. 1- 106298.26.
[7] 刘清清, 杨江天, 尹子栋 . 基于双树复小波分解的风机齿轮箱故障诊断[J]. 北京交通大学学报, 2018, 42(4):121- 125.
[8] SHI Xianjiang, YI Cao, WANG Zhenmeng, et al. Fault diagnosis of planetary gear based on wavelet real modulation zooming and
resonance demodulation[C]// 2017 IEEE International Confer‐ ence on Information and Automation (ICIA). IEEE, 2017.
[9] LI Lin, JIHongbing. Signal feature extraction based on an im ‐ proved EMD method[J].Measurement,2009, 42(5):796-803.
[10] 郑近德, 程军圣, 杨宇 . 改进的 EEMD算法及其应用研究[J]. 振动与冲击, 2013, 32(21):7.
[11] DragomiretskiyK, Zosso D. Variational Mode Decomposition[J]. IEEE Transactions on Signal Processing, 2014, 62(3):531-544.
[12] LI Yangbo, LI Guoyan, YU Wei, et al. Health condition identifi ‐ cation of planetary gearboxes based on variational mode decom ‐ position and generalized composite multi-scale symbolic dy ‐ namic entropy[J]. ISA Transactions, 2018(81):
S0019057818302210.
[13] LIU Chang, CHENG Gang, CHEN Xihui, et al. Planetary
Gears Feature Extraction and Fault Diagnosis Method Based on VMD and CNN[J]. Sensors, 2018, 18(5).
[14] 李玉豪, 刘远宏 . 基于 VMD 相关系数峭度提取行星齿轮箱 故障特征[J]. 兵器装备工程学报, 2021, 42(6):6.
[15] WU Shoujun, FENG Fuzhou, WU Chunzhi, et al. Fault Feature Extraction of Compound Planetary Gear Based on VMD and DE [C]// 2019 Prognostics and System Health Management Confer ‐ ence (PHM-Qingdao). IEEE, 2019.
[16] 张燕霞, 户文刚 . 基于 VMD-SVD 和 SVM 的旋转机械故障诊 断研究[J]. 机电工程,2022,39(3):324-329.
[17] Sharma V, Parey A . Extraction of weak fault transients using variational mode decomposition for fault diagnosis of gearbox
under varying speed[J]. Engineering Failure Analysis, 2019 (107):104204.
[18] Chen X, Peng L, Cheng G, et al. Research on Degradation State Recognition of Planetary Gear Based on Multiscale Information Dimension of SSD and CNN[J]. Complexity, 2019(9):1- 12.
[19] Qiao M, Yan S, Tang X, et al. Deep Convolutional and LSTM Recurrent Neural Networks for Rolling Bearing Fault Diagnosis Under Strong Noises and Variable Loads[J]. IEEE Access, 2020 (99):1.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45420.html






