SCI论文(www.lunwensci.com)
摘要:为缓解因当前城市用地成本高、用地而紧张造成的“停车难”问题,创新设计了立体车库结构及控制方式。所设计的立体车库机械结构灵活多变,大小、形状可根据车库建造现场占地面积及实际情况定制设计,同时在存取车辆过程不使用载车板,采用了一种无载车板载运小车存取机构,利用载运机构和车位上动静两种叉梳板的上下交替实现了车辆的存取。控制系统使用了PLC、传感器、触摸屏、物联网等技术实现了立体车库的车辆自动存取、车位预约等功能。设计并制作了该立体车库的1:20模型并开展了多次测试。测试结果显示,车辆的全程自动化存取功能可在手机端操作实现,同时以车位锁定的方式实现了车位预约功能。为立体车库的研究与发展提供一定的参考。
关键词:定制;立体车库;PLC;叉梳板
Development of a Carrier-plate Free Automatic Stereo Garage and Its Control System
Xu Wenyan,Du Yuxiang,Ning Mingtian
(Guangzhou Nanyang Polytechnic Vocational College,Guangzhou 510925,China)
Abstract:To alleviate the parking difficulty issue caused by the high cost of urban land and the tension of land usage,this paper innovate a
design of three-dimensional garage structure and control,its mechanical structure is flexible and changeable,its size and shape can be
changed with a customed garage size or actual situation.At the same time,carrier plate is replaced with a fork-comb lift carrier,by moving two
fork comb lift plate to load/unload vehicle.The control system adopts PLC,sensor,touch screen,IoT to realize the automatic vehicle parking
and parking reservation.A 1:20 shrank-size model is built and multiple tests are carried out.The results show that full automatic vehicle
parking can be achieved on mobile phone terminal,parking reservation function can also be realized by locking a specific parking space.The
design of this system can provide some reference for the research and development of stereo garage.
Key words:custom;stereo garage;PLC;fork comb plate
0引言
近年来,立体车库的大力推广与应用有效缓解了部分城市传统停车场占地面积大、车位不足等困扰[1-3]。但分析国内外文献及多家立体车库产品可以得出,当前国内立体车库普遍还存在存车体积大型化、车辆存取耗时长、停车设备利用率低、结构复杂、维护困难、在人流密集场所用户停车拥堵等现象,导致立体车库行业发展缓慢[4],无法解决城市停车难的问题。
根据当前立体停车库行业存在的上述不足,本文在现有占地面积的基础上设计一个智能立体停车装置,约占用4个停车位的面积,共分为3层,每层可停放4辆汽车,一层为原有停车位,二、三层设置在一层正上方,每层垂直高度均为2 m[5]。存取车的载运机构设在一层的车辆入口处。立体车库的控制系统以PLC为核心[6],通过传感器等控制元件而实现自动控制,用户只需在触摸屏上按下按钮就自动实现车辆的存取[7],并可以配合智能手机实现车位预定功能[8],是一种停取车辆操作便捷、安全性能强、自动化程度高、适用性强的立体车库。
1总体设计方案
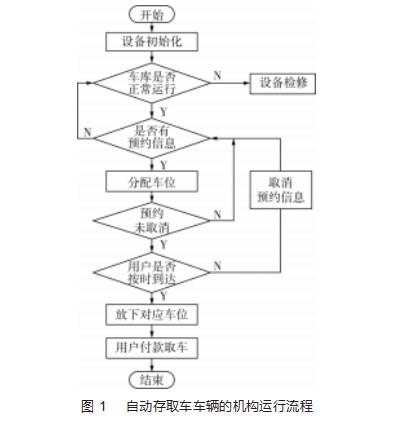
车库的目标对象是一般的家用小汽车。由于家用小汽车大小不一,采用两对激光对射传感器检测车辆是否合格。由于车库内部具有一定的危险性,车辆须停在出入口处接受检测[9]。合格车辆将由出口处的滑台传动机构送入车库内部的存取机构。存取机构由前后滑台模组和上下滑台模组以及控制左右旋转的旋转平台组成。车辆被送到指定位置后,入口处的滑台模组上的限位接近开关就会得到信号,然后由前后的滑台模组动作把车辆放到位于前后滑台模组上的叉梳板上,运动到合适的位置后,存取机构会根据用户所选择的车辆,先通过控制楼层的激光限位传感器来控制上下滑台模组找到相对的楼层,然后再由车位激光传感器来控制旋转平台来找到车位,找到车位后由前后滑台模组把车辆运动到车位的上方,对准车位的静叉梳板后,由上下滑台模组向下运动把车辆放到车位上,然后收回动叉梳板,再回到放车的楼层后,向下运动通过楼层激光传感器回到一楼,再通过入口处激光控制旋转平台找到车库入口,然后动叉梳板返回入口处位置。存车和取车的过程大致相同,不同点在于存车是在找到车位后动叉梳板从上往下运动,而取车是找到车位后动叉梳板从下往上运动从而运动到把车辆从静叉梳板上放到动叉梳板[10]。具体如图1所示。
2硬件设计
2.1模型硬件选型
根据立体车库设计工艺的需求,整体硬件系统分为控制系统和传动机构2部分,其中传动机构的硬件选择及其功能如下:行程300 mm的CB线轨滚珠丝杠滑台模组2组,一组用于车库入口外把车辆运送到车库入口,一件用于车库内部的传动机构,其主要功能是实现载运小车在车库内部的前后运动;行程700 mm的CB线轨滚珠丝杠滑台模组2组,功能是实现载运小车在车库内部的上下运动;型号MTB60精密步进中空旋转平台1个,实现载运小车在车库内部的左右旋转运动;型号42BYGH3步进电机1个,用于提供中空旋转平台的动力来源;型号TB6600的步进电机驱动器1个,用于驱动中空旋转平台的动力步进电机[11];型号DM542的步进电机驱动器3个,1个用于驱动车库入口处的滑动模组,1个用于驱动车库内部传动机构上下运动的滑台模组,1个用于驱动车库内部传动机构前后运动的滑台模组。
控制系统硬件部分硬件选择及其功能为:车库控制器选择型号为Fx2N-48MR的三菱PLC及1个拓展模块;双模式PWM脉冲个数频率占空比可调发生器模块2个,1个用于空旋转平台电机驱动器的脉冲信号,1个用于车库外滑台模模组驱动器以及车库内前后上下运动的驱动器的脉冲信号;激光对射光电开关30组,3个发射端和1个接收端用于车库楼层限位,13个发射控制和1个接收端用于车位位置限位,12个发射端和12个接收端用于检测车位是否有车辆,2个发射端和2个接收端用于车库入口检测车辆是否放置合格;DC-DC可调5 A数控降压电源模组1个,用于中空旋转平台电机驱动器的脉冲模块供电;3个常开闭的开关和3个复位,用于手动调试的控制;24 V直流电源1个,用于滑台模组驱动和中空旋转平台驱动器以及三菱的触摸屏的供电;12 V直流源1个,用于所有传感器的供电;接近开关4个,用于车库外滑台模组和车库内传动机构前后运动的滑台模组的限位;急停开关1个,用于车库的通断电。
2.2硬件控制系统
根据立体车库需要实现的功能及上述所选择的硬件,根据设计要求选用的PLC型号为三菱的FX2N-48MR,进行了控制系统PLC的I/O端分配,其中输入开关量为34个,输出开关为19个,表1所示为I/O端分配表,图2所示为PLC硬件接线图。
3控制系统设计
3.1触摸屏控制系统
为方便用户快速简单地选择合适的车位,利用触摸屏设计了操作界面,点击触摸屏即可选择对应的功能。操作界面主要包括主界面、取车界面、存车界面。主界面可选择存车、取车。在存车界面,绿色指示灯表示车位空闲,可选择,红色指示灯表示车位已被占用,无法选择。选择车位后按下确认即开始存车[12]。取车界面与存车界面类似,选择已停车位编号后确认即可执行取车动作。具体操作界面如图3~5所示。
3.2 PLC控制系统
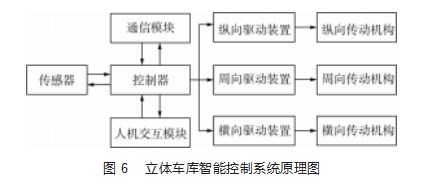
本项目研究的预期目标是一种PLC、触摸屏、物联网控制的自动立体车库控制系统。在本研究中主要利用传感器控制技术、现代电工电子控制技术、人机界面组态技术、PLC编程控制技术等,以智能控制理论为基础,PLC可编程控制技术为依托,将传感器、控制器和执行器结合起来,将整个控制中的模拟信号转化为数字电信号,以实现控制流程的自动化,将人机操作界面与PLC控制端相结合,以实现控制系统操作过程可视化[13-16],具体控制框架设计如图6所示。
3.3物联网车位预约模块
城市小区停车位人工值守的管理方式成本高、效率低,无法对车位的占用及空闲情况进行信息化处理,车位的利用率及信息化程度相对较低。为提高车位占用信息识别及传输的信息化管理,本文为立体车库控制系统设计了一种基于物联网模块(图7)控制的车位预约功能,其控制原理是通过手机APP端控制物联网模块上车位有无传感器信号的闭合与断开,从而控制每个车位上对射传感器发射端的得电与失电实现车位在系统锁定,达到预约功能,实现用户高效快捷的使用车位[17],如图8所示。
4测试验证与结果分析
由于本模型是一个3层12车位的立体车库,因此只设计一个车辆存取口,为考虑到多车位的销量问题,可后续在实际应用中可根据实际情况设计多个。通过硬件设计与控制系统的调试,在模型(图9)上进行了控制功能测试。松开急停按钮,按下启动按钮,车库绿灯亮,表示控制器正常。在手机端提前锁定任意一个车位,车位上控制有无车辆传感器指示灯熄灭,并在触摸屏上显示该车位已有车,实现了车位预约功能。
存车功能测试。选择车位按下所选的车位的按钮,所选的车位的激光限位传感器的电,再按下存车按钮,程序开始运行,检测选择的车位是否有车,没有车则程序检测车辆是否合格,合格后启动车库入口处的滑台模组向后运动。车辆运到合适位置后,限位传感器触发动作,车库外滑台模组停止启动。车库内传动机构上下运动的滑台模组向下运动5 s后停止。车库内传动机构的前后运动的滑台模组带动动叉梳板向前运动,到了合适位置后触发传感器动作,向前运动停止,上下运动的滑台模组向上运动7 s后停止。汽车到了车库内叉对梳板上之后,车库外滑台模组向前运动,到合适位置后触发限位传感器停止运动。前后滑台模组向右运动到合适位置后触发传感器动作后停下运动。上下滑台模组向上运动,到合适位置后触发传感器动作后停止运动,并根据用户所选择的车位左转或右转,旋转到合适时,激光限位位置后触发激光限位,传感器动作的停止旋转。前后滑台模组向前运动,到合适位置后触发激光限位传感器动作,停止向前运动。上下滑台模组开始向下运动8 s后停止,此时汽车已被放到车位的静叉梳板上。前后滑台模组向后运动到合适位置后触发限位传感器后停止运动,上下滑台模组开始向上运动,运动到合适位置后,触发楼层限位传感器后停止运动。然后上下滑台模组向下运动,运动到触发一楼的激光限位器后停止运动。然后向旋转平台的反方向运动,旋转到出口位置后触发激光限位传感器后停止运动,之后程序复位。
取车过程与存车类似,其中只需要用户在触摸屏选择取车界面,根据存车时的车位信息按照提示操作即可完成取车,完成一次取车后载运机构回到车库入口处位置,等待下一次动作。
5结束语
本文设计了一款立体停车位自动控制系统,可以实现车辆的自动存取,自动化水平高。根据控制系统设计及模型的设计与调试可以得出,本研究的立体的优势如下。
(1)存取车辆不使用载车板,建设成本低,存取效率快。
(2)建设周期短、投资少。所设计的立体停车位自动控制系统支持在原有地面停车位的基础上改进,不破坏原有停车位,相比同等容量的地下车库建设,本立体车库投资少、施工短、耗电少。
(3)一键存取,操作便捷。采用自动控制系统,整个过程无需专门的工作人员,司机就可单独完成。
(4)增加了手机端App车位预约功能,提高了车库利用率、车辆存取的效率。
随着我国经济持续快速的发展,城市规划的完善,立体车库将在未来得到长足的推广及普及,立体自动式停车库行业将会是一个充满生机的朝阳行业,立体化停车技术也将朝着人工智能化的趋势发展。
参考文献:
[1]丁述勇,张征,丁文洁,等.多巷道式立体车库优化设计与车辆存取策略研究[J].工程设计学报,2021,28(4):443-449.
[2]侯相荣,闫宏伟,杨雄,等.巷道堆垛式混合车库设计及存取策略分析[J].科学技术与工程,2021,21(11):4669-4674.
[3]张永锐,张忠林,王飞皓,等.基于慧鱼模型方法的老旧小区立体车库创新设计[J].机电工程技术,2021,50(5):165-170.
[4]韩艳,李婉莹,杨光,等.居住区停车场立体化改造决策机理[J].北京工业大学学报,2019,45(9):879-885.
[5]张明聚,李帅.高层建筑式立体车库梯形楼板及次梁设计分析[J].建筑结构,2020,5050(S1):769-775.
[6]石冰,郝杰,关清凡.基于三菱PLC与组态软件的立体车库设计[J].轻工科技,2021,37(10):29-30.
[7]陈红艳,刘鹏,刘建鹏,等.智能立体车库远程监控系统研发[J].机械设计与制造,2020(2):187-190.
[8]韦倾,陈娇英,陈延明.基于物联网的智能立体车库创新实践系统研制[J].广西大学学报(自然科学版),2020,45(2):336-342.
[9]李虎.地上智能立体车库设计[J].机械工程与自动化,2020(5):99-101.
[10]常青青,周建阳,吴耀光.仓储式自行车自动存取立体车库设计[J].机械设计与研究,2022,38(2):193-196.
[11]王丽杰,代敏,刘志强,等.立体车库智能测控中三闭环电机控制系统[J].电机与控制学报,2020,24(5):107-115.
[12]李建国,杨波,马尚鹏.基于顾客到达拟合的立体车库搬运器待命位设计策略[J].交通运输系统工程与信息,2021,21(6):217-225.
[13]王瑞,赵雄伟,张波波,等.智能立体车库自动控制系统的设计及模拟应用[J].制造业自动化,2022,44(1):134-138.
[14]刘日,李建国,王小农.立体车库车位分配建模与仿真[J].江苏大学学报(自然科学版),2018,39(1):19-25.
[15]张惠敏.基于PLC与小程序的自助立体车库系统设计与分析[J].机电信息,2022(18):31-34.
[16]郑国锋.基于PLC技术的智能立体控制车库设计[J].电子技术与软件工程,2022(9):130-133.[17]
[17]张宇迪,潘星宇.智能停车场管理系统在升降横移立体车库中的应用[J].数字技术与应用,2022,40(8):203-205.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65229.html