SCI论文(www.lunwensci.com)
摘要:使用倾斜摄影无人机结合PhotoScan Pro对城市环境建立了三维模型,通过MATLAB对所建立的城市道路三维模型进行两点间的路径规划,结合飞行无人机实现了三维路径规划的测试。通过设立现实场景,在场景里设立像控点,使用无人机对设立场景进行三维建模,然后将模型导出至MATLAB进行三维路径规划,最后导出代码通过飞行无人机在现实场景进行飞行测试。测试结果表明:三维建模的环境与现实环境存在偏差,且根据模型得到的三维路径规划与现实也存在偏差,其偏差值受照片清晰度、照片组对齐度、像控点建立和拍摄角等的影响。采用倾斜摄影建立多个像控点后,得到的照片对齐率比不设置时的影像提高了7%,最终三维建模模型的完整还原度提高了4%。运用A~*算法通过结合MATLAB实现三维模型的三维路径规划,比对多条规划路线最终实现了三维路径规划。所提方案可供解决城市拥堵、交通规划提供参考。
关键词:无人机,倾斜摄影,A~*算法,三维建模,路径规划
3D Path Planning Based on UAV Oblique Photography
Yang Xiangdong,Zhou Wenfeng,Zhang Chenhong,Pan Wenbin,Mai Kairui
(School of Mechanical and Electrical Engineering,Guangzhou Huali University,Guangzhou 511325,China)
Abstract:A 3D model of the urban environment was established using a tilt camera unmanned aerial vehicle(UAV)combined with PhotoScan Pro.The path planning between two points was performed on the three-dimensional model of the urban road using MATLAB,and a three-dimensional path planning test was implemented using a flying drone.By setting up a realistic scene,setting up image control points in the scene,UAV was used to conduct three-dimensional modeling of the set up scene,and then the model was exported to MATLAB for three-dimensional path planning.Finally,the exported code was used for flight testing in the actualscene through flying drones.The test results show that there is a deviation between the three-dimensional modeling environment and the real environment,and there is also a deviation between the three-dimensional path planning obtained from the model and the reality.The deviation value is affected by photo clarity,photo group alignment,image control point establishment,and shooting angle.After using oblique photography to establish multiple image control points,the alignment ratio of the obtained image is improved by 7%compared to the image without setting,and the overall restoration degree of the final 3D modeling model is improved by 4%.Using the A~*algorithm and combining MATLAB to achieve 3D path planning for 3D models,the 3D path planning was finally achieved by comparing multiple planned routes.The proposed scheme can provide reference for solving urban congestion and traffic planning.
Key words:unmanned aerial vehicle;oblique photography;A~*algorithm;3D modeling;path planning
0引言
随着社会的飞速发展汽车出行成为了人们的主流出行方式,而交通堵塞也成为目前的主要问题,本文使用无人机可以通过三维建模对现场所有车辆或障碍物进行建模,通过A~*算法计算出最短行动路径。对比如今倾斜摄影在三维模型精度和还原度方面的研究,本文主要研究方向是实现对PhotoScan的三维模型进行路径规划。本文为解决城市交通堵塞设计了由无人机倾斜摄影技术结合PhotoScan进行三维建模,再由MATLAB对三维模型进行处理,得到三维路径规划方案。
目前无人机摄影技术是一门新兴技术,国内的大疆无人机技术在倾斜摄影技术行业中已经非常成熟,且无人机的倾斜摄影技术运用在各种行业中,如大型3D游戏的三维模型或者场景再现等。国外的倾斜摄影技术在20世纪90年代开始发展,该技术已经在北美、欧洲许多领域中运用,如电影行业中的场景修改模拟和城市三维模型的还原。
本项目通过改进的A~*算法运用在三维空间中对无人机航拍的路径进行优化和在现实拍摄场景设立像控点,使无人机更好地获得影像;根据无人机倾斜摄影的影像结合软件Agisoft PhotoScan Pro对影像进行三维建模,再使用MATLAB对建模三维环境进行处理,从而得出环境的三维路径规划,最后得出的三维路径规划转换为C语言代码传输给飞行无人机,让飞行无人机进行实际测试,得到实际数据和偏差。
1系统总体设计
倾斜摄影无人机在目标地面上空飞行,在目标地点上空根据计算机规划好的拍摄进行各点飞行摄影。计算机处理摄影出的影像结合软件Agisoft PhotoScan Pro对影像的进行三维建模,通过使用MATLAB对三维建模进行处理,得出环境的三维路径规划的理论路径与理论距离,并使用飞行无人机对路径进行实际测试。
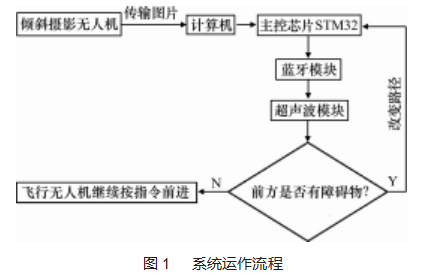
采用了嵌入式机器视觉的飞行无人机,飞行无人机系统主要为软件部分和硬件电路部分。系统硬件部分大致分为主控芯片STM32F103最小开发板及其外围集成电路、HC-SR04超声波模块、MS88SF2蓝牙模块、电源。飞行无人机的飞行指令控制如图1所示。
2硬件设计
本项目使用大疆无人机与飞行无人机共同完成三维路径规划。大疆无人机通过自带的软件进行飞行操控与倾斜摄影,如图2所示。
设置无人机飞行参数与规划飞行路径,开始任务后把拍摄的照片同步储存到云端,计算机在云端下载进行建模。使用MATLAB的程序进行路径规划。
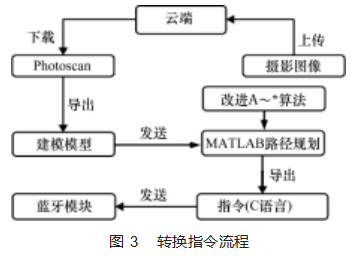
计算机经过处理转化为C语言给链接蓝牙模块的飞行无人机发送信号根据信号前进,转换指令具体流程如图3所示。
2.1飞行无人机的主控制器
自制无人机使用的STM32F103为主控设备,而STM32F103则包括较中低端的3个ARM微控制器,其核心为Cortex-M3,最大运算频率达7 MHz,在存储器的零等待循环使用时限内可达到1.5 DMIPS/MHz。
2.2自制小型飞行无人机
飞行无人机装有蓝牙模块、超声波模块、电机模块等多个模块。蓝牙模块为该项目主要运用模块,通过蓝牙连接计算机从而接收计算机发出的指令传到连接的主控制器STM32F103控制各个模块的信息,各模块的反馈的信息通过蓝牙模块发送给计算机。
采用MS88SF2蓝牙模块,由于需远程连接机器人,HC-06蓝牙模块的连接有效距离只有5~10 m,而MS88SF2的有效距离有50~100 m,符合该项目的要求。
采用HC-SR-04超声波模块可提供2~400 cm的非接触式距离感测功能,测距精度可达到3 mm;模块包括超声波发射器、接收器与控制电路,可测出前方障碍物的具体距离。
2.3执行机构
飞行无人机机身由3D打印构件材料制作,尺寸为400 mm×310 mm×150 mm,质量为2.2 kg。其机构主要分为MPU6050 Acc电机模块、MS88SF2蓝牙模块和HC-SR-04超声波模块。
主控芯片STM32F103ZET6最小开发板,通过调节PWM脉冲信号的最高电平占比,达到准确调节飞行无人机的螺旋桨转速,可以降低飞行无人机的耗能,所以采用12 V的稳定工作电压使电机稳定地运动。
该飞行无人机能胜任本项目规划出的路径需要完成测试的行动,可根据规划出的路径进行行动与探测。
3软件设计与算法实现
本项目使用了Agisoft PhotoScan Pro对图像处理建模,无人机通过其硬件系统的蓝牙与电脑连接传输倾斜摄影相机拍摄的图片,计算机接收图片后对图片运用AgisoftPhotoScan Pro进行处理三维建模,再使用MAT‐LAB通过改进后的A~*算法进行三维路径规划等一系列操作。
3.1算法设计
首先对无人机进行A~*算法路径规划建模,设定无人机的出发点位置、目的地位置、飞行时环境参数信息、飞行的速度设置为恒定值。设立无人机飞行时的3大性能约束函数[1],无人机的性能约束函数主要分为3类:最大航迹长度约束、最小航迹长度约束和转向角约束。
无人机最大航程约束建模,如图4所示,过直线段连接相邻航迹点表示无人机的三维航迹,其中S代表出发点位置、G代表目的地位置,整条航迹由N个航迹点M1,M2,…,MN分为N+1等份,航迹点MK的坐标表示为(xk,yk,zk)。无人机飞行航迹的总长度L与最大航程Lmax的关系如式(1)所示[2]。
式中:L为航迹总长度;lk为分段航迹长度。
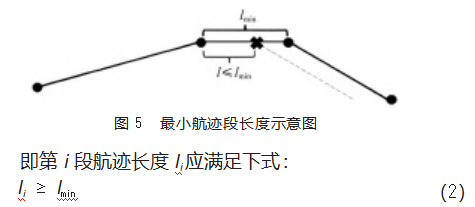
无人机最小航程约束建模,在高速飞行的状态下,无人机无法立刻改变航向,通常在连续的两次改变航向之间,需要保持一定长度的直线飞行,这段直线距离称为最小航迹段长度。因此,航迹段长度应该大于或等于最小航迹段长度。如图5所示,lmin代表最小航迹段长度,当航迹段长度l小于最小航迹段长度lmin时,受机身性能的限制,无人机不能在该航迹点成功转向,而要沿原有航向继续飞行一段距离。
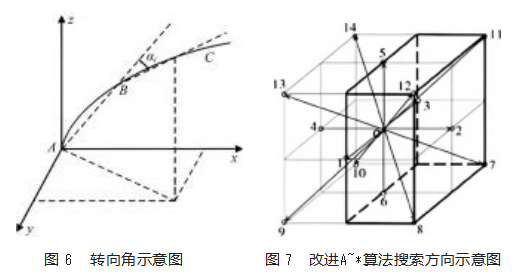
无人机转向角约束建模,转向角为无人机在飞行过程中前一时刻飞行方向与当前时刻飞行方向的夹角,如图6所示。转向角可以使无人机路径更加平滑,因此转向角必须小于允许最大转向角αmax。转向角计算公式如下:
然后通过改进实际代价函数和改进动态搜索方向的两个方面来对A~*三维路径规划算法进行改进。
改进实际代价函数,在无人机的飞行航程代价中加入电量消耗计算[3]。设无人机电能消耗余飞行距离成正比,正比系数为k,改进后的实际代价函数为:
其中,λ1、λ2分别为无人机飞行时间电量消耗的代价权重系数;(xn,yn,zn)和(xn-1,yn-1,zn-1)为相邻量航迹点三维坐标;t(n-1,n)为无人机相邻航迹点之间飞行时间,其计算方法[4]:
改进动态调整搜索方向,在搜索相邻节点时,又尽可能可以搜索更多的方向,首先确定14个方向进行搜索,即空间立方体的8个顶点与6个面的中心点[4],如图7所示。
当路径较长时,每个节点都搜索14个方向会产生大量的搜索空间,不仅造成了空间浪费,也会影响搜索速度,因此文中采用动态调整搜索方向的方法,减少搜索空间。
设当前点到终点的方向与搜索方向夹角为θ,根据障碍物分布情况确定θ范围。每次迭代确定搜索方向前,选取在θ范围的搜索方向作为相邻点的搜索方向。设当前点到终点的方向与搜索方向夹角为θ,根据障碍物分布情况确定θ范围。每次迭代确定搜索方向前,选取在θ范围的搜索方向作为相邻点的搜索方向。
步骤1:计算当前点与终点连线的方向向量l。
步骤2:计算14个搜索方向向量与l的点乘积,点乘积越大,当前点与终点连线的方向向量与搜索方向向量夹角越小[5-6],即两者方向越接近。
步骤3:判断搜索方向是否在设置的夹角θ范围内,将在范围内的搜索方向作为该点相邻节点的搜索方向。
3.2仿真实现
利用MATLAB R2018b实验平台进行仿真验证,模拟真实场景下的无人机飞行环境。仿真环境:设置无人机起始点和目标点,以及15个不同大小的长方体作为障碍物,如图8所示。
在仿真环境下三维路径规划[7]的仿真结果如图9、图10所示。
3.3建立物理模型
Agisoft PhotoScan Pro是一款可以通过无人机拍摄的图像对图像组进行对齐、建立密集点云、生成网格、生成纹理、导出DEM、拼接成果、正射影像最后可以得到一个三维模型的软件。
Agisoft PhotoScan Pro可建模图片严格根据《低空数字航空拍摄规范》[8]对于飞行质量和影像质量的要求,摄影出的图像航向重叠度最小不能小于53%,旁向重叠的最小不能小于8%。而且无人机航拍飞行需要多次重复路径循环拍摄,防止出现漏拍导致照片无法对齐的现象。
无人机拍摄影像可能会存在Pos(位置)数据无法确认的情况,缺失部分文件的pos数据可能会导致影像对齐失败。可以先将全部照片的pos数据导出至一个Txt文本中。通过Txt文本对缺失部分补充修改后,再将文本导入图像组即可。
由于本项目仅需对环境的三维模型,并不需要过高精度的建模,所以不需要生成纹理,仅需生成网格后即可导出三维模型进行后续的操作,网格后导出模型如图11所示。
3.4交互环境
本项目运用结合改进的A~*算法通过PYTHON编写结合MATLAB制作出一个可以对三维环境进行路径规划的方案。通过三维模型XY轴方向视角运用二维空间的A~*算法可得出XY平面最短路径,再通过对XZ轴和YZ轴方向的视角可以得出XZ、YZ方向的最短路径,于是再进行点的连接可以得出三维空间的最短路径规划,通过飞行无人机的超声波模块与OpenMV可得知前方路径是否可以前进,若可以前进则继续,反之则反馈计算机再重新进行路径规划,等待下一部指令[9-10]。超声波障碍检测运行流程如图12所示。
4试验验证
4.1验证场景
验证场景为随机一块392 m×390 m面积的地点。在地点上空操控无人机进行拍摄。飞行高度为100 m,设置无人机的航向重叠率为85%、旁向重叠率为80%,相机倾斜角度为45°,最短拍照间隔为2 s,最大飞行速度为15 m/s。无人机拍摄范围与航线规划如图13所示。
4.2图像建模试验
本次拍摄了78张照片,因为在部分地标设立了5个从上空往下看较为显眼的地面控制点。所以照片对齐了73张,有5张照片的os数据无法对齐,所以导出78张照片的pos到Txt文本上进行补漏,建立了用中等品质形成密集点云[11-13],最后形成的网格如图11所示。
本次测试建模的像控点坐标上x、y、z的投影误差如表1所示。其中,GCP为地面控制点;AXY/Z为精确的XY/Z;EX为X误差;EY为Y误差;EZ为Z误差;PE为投影误差(像素);V/M为已验证/已标记;误差数值取绝对值AXY/Z均为0.020/0.020。
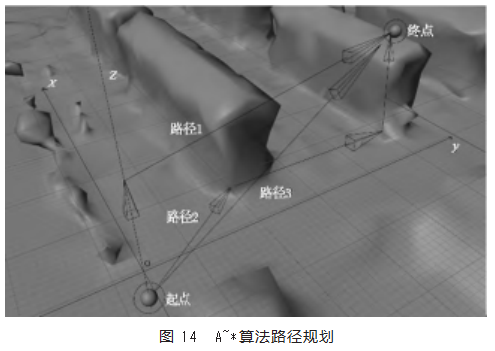
4.3三维模型结合A~*算法路径规划运行结果
三维模型图通过结合A~*算法编写出PYTHON的代码和环境三维模型导入MATLAB运行可以得出如图14所示的无人机的飞行路径,根据三维空间A~*算法可得出无人机的多条飞行路径[14-15],其中3条路径为最短的3条飞行路径。
路径1为无人机垂直上升16 m,X轴正偏移37.2°,再向前前进39 m,到达目的地理论距离为55 m,实际距离为55 m。
路径2为无人机X轴正偏移46.4°,然后前进19.6 m,无人机飞行至18.3 m时超声波检测到前方0.6 m有障碍物,然后进行Y轴正偏移46.4°前进23 m,再垂直上升16 m,最后左转90°前进0.6 m,到达目的地的理论距离为58.6 m,实际距离为57.9 m。
路径3为无人机X轴正偏移37.2°,再Z轴正偏移32°,最后前进54.2 m,到达目的地理论距离为54.2 m,实际距离为54.2 m。
最后得出结论:无人机实际飞行最短路径为路径3,且由路径2可以得知理论路径与现实路径会因为建出的三维模型的精细问题出现偏差。
4.4倾斜摄影无人机与飞行无人机的结合运用
在测试中通过无人机对环境进行拍摄,通过计算机软件Agisoft PhotoScan Pro建模出三维空间模型。然后再通过运用PYTHON编写的程序运用于三维空间中的A~*算法通过MATLAB进行路径规划可以实现三维空间的路径规划。倾斜摄影无人机通过设计好的拍摄路径运用倾斜摄影相机在空中进行摄影,摄影的图片通过云端导入PhotoScan Pro进行建模,完成建模后导入模型至MAT‐LAB运行,用PYTHON编写的三维空间A~*算法的三维路径规划,可以得出环境的三维空间路径规划路线。最后可以通过飞行无人机进行路线的测试飞行来对比理论飞行距离与实际飞行距离。
5结束语
本项目通过倾斜摄影无人机与飞行无人机的结合实现了对城市的部分环境的三维环境的建模与三维路径规划,并运用了飞行无人机在三维环境对应的场地进行试飞与记录。说明了三维建模的环境与现实环境存在偏差,且根据三维建模得到的三维路径规划也与现实存在偏差,其偏差值会受到照片的清晰度、照片组的对齐度、像控点的建立和倾斜拍摄的拍摄角等影响。但本项目成功实现了运用倾斜摄影无人机的倾斜摄影建立多个像控点,得到的照片对齐率对比不设置时的影像提高了7%的精确度,最终提高4%三维建模模型的完整还原度。运用A~*算法通过结合MATLAB实现三维模型的三维路径规划,所规划路线是通过A~*算法所计算所得的并不是最短路径,最终实现了三维路径规划。
参考文献:
[1]陈亚青,张智豪,李哲.无人机避障方法研究进展[J].自动化技术与应用,2020,39(12):1-6.
[2]王胜军,张强,赵明岭.倾斜摄影测量在三维建模中的应用探讨[J].科技与创新,2022(14):34-37.
[3]任晔,王俊雄,张小卿.基于多因素改进A~*算法的AUV路径规划研究[J].舰船科学技术,2022,44(11):58-62.
[4]姜媛媛,张阳阳.改进8邻域节点搜索策略A~*算法的路径规划[J].电子测量与仪器学报,2022,36(5):234-241.
[5]卞强,孙齐,童余德.一种新的改进A~*算法无人机三维路径规划[J].武汉理工大学学报,2022,44(7):80-88.
[6]郭煜.改进粒子群优化算法的非线性方程组求解研究[J].自动化技术与应用,2022,41(7):6-9.
[7]Sathiya V,Chinnadurai M,Ramabalan S.Mobile robot path plan‐ning using fuzzy enhanced improved Multi-Objective particle swarm optimization(FIMOPSO)[J].Expert Systems With Applica‐tions,2022,198.
[8]CH/Z 3005-2010,低空数字航空摄影规范[S].
[9]杨向东,潘文彬,麦铠芮,等.基于机器视觉的擦玻璃机器人研制[J].智能制造,2022(3):4.
[10]张济森,李秀娟,周辉.基于迭代学习观测器的舵机故障诊断[J].自动化技术与应用,2022,41(7):1-5.
[11]袁兴宇,唐立军,杨家全,等.基于无线传感器的电力巡检机器人轨迹跟踪研究[J].自动化技术与应用,2022,41(7):16-20.
[12]Zhou T,Lv L,Liu J,et al.APPLICATION OF UAV OBLIQUE PHOTOGRAPHY IN REAL SCENE 3D MODELING[J].The In‐ternational Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2021,XLIII-B2-2021.
[13]刘安琪,冯瑞.无人机倾斜摄影实景三维技术研究[J].测绘与空间地理信息,2022,45(S1):293-295.
[14]付道阔,范平清.改进A~*算法的三维无人机路径规划[J].智能机器人与应用,2020,10(12):155-159.
[15]李安福,曾政祥,吴晓明.浅析国内倾斜摄影技术的发展[J].测绘与空间地理信息,2014,37(9):57-59.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61750.html