



SCI论文(www.lunwensci.com):
摘 要 :为解决工程测量精度低问题,引入无人机低空摄影测量系统,开展其在工程测量中的应用研究。通过基于无人机低空 摄影测量系统的区域网平差、基于传感器的测量误差校验,提出一种全新的测量方法。通过将该方法应用于实际证明,新的测 量方法无论是针对平原地区还是丘陵地区, 均能够将测量误差控制在 1.00mm~3.00mm 范围内, 满足工程测量的高精度需要。
关键词 :无人机 ;低空 ;摄影 ;测量系统 ;工程测量 ;应用
近几年,无人机技术得到了长足的发展,而无人机低空摄影 测量系统的应用优势也逐渐凸显。该系统在实际应用中具备结 构简单, 并且使用成本更低的优势。不仅能够完成有人驾驶飞机 执行的各项任务,同时也能够针对有人飞机无法到达的区域完 成各项工作任务,例如危险区域或遥感监测任务等 [1]。在利用无 人机对被监测或被测量物体进行航拍时,其影像的清晰度和比 例尺等均能够达到良好的预期效果。当前该系统已经逐渐应用 到林业、农业、资产调查等领域当中,并逐渐成为国家测绘部门 以及相关机构重点推广的新技术。随着当前现代技术的不断进 步,全球定位系统技术、通信技术等均得到良好发展,而无人机 的民用化水平也逐渐提升,所涉及的领域逐渐扩展到三维建模、 林业、灾害评估等 [2]。当前,全球无人机种类众多,并且结构相 差较大,根据不同的测量任务可对无人机的类型进行合理选择, 以进一步提高该系统的应用效果。因此, 基于当前无人机低空摄 影测量系统的应用优势, 本文以工程测量为例, 针对其在工程测 量当中的应用开展相关研究。

1 无人机低空摄影测量系统在工程测量中的应用
1.1 基于无人机低空摄影测量系统的区域网平差
为了实现对作业工程的现场测量,本次研究中引进无人机 低空摄像测量系统, 参照系统的作业流程, 进行区域网的平差研 究。其中系统测量作业流程如下图 1所示。

在掌握系统作业流程的基础上,采用在野外布控测量点的 方式,进行工程测量区域的三维布网。在完成相关作业行为后, 进行区域网平的校正与约束, 在此过程中, 选择单航带连续法进 行重叠区域进行坐标系的构建,将构建的坐标系与校正的三维 空间坐标轴进行叠向对接。完成对坐标点的对象处理后, 提取空 间坐标轴内的三角元素, 将定值元素作为一个定值数据, 按照此 种方式实现对空间坐标轴的校正 [3]。并将校正后的坐标轴与辅向 坐标轴保持相互平行,对应模型的比例尺与原点坐标保持布标, 可得到一个X-Y-Z 的区域网坐标体系。在此基础上,将航带的立 体摄像探头进行相对定向处理,进行平差过程中坐标轴的转换。 此过程如下计算公式所示。

公式(1)中 :X、Y、Z 分别表示为区域网坐标体系 ;x、y、z 分别表示为三维布网对应的空间坐标点 ;R表示为校正范围 ;f表示为坐标点连续性, 按照上述计算公式, 实现对坐标体系的转 换,参照转换后的坐标点, 完成对工程测量区域的平差处理。
1.2 基于传感器的测量误差校验
按照上述内容实现对工程区域的测量的区域网平差后,为 了确保测量结果的精度, 需要对测量结果进行检验, 从而实现对 其误差的补偿。传感器是测量系统当中重要的组成部分, 在一定 程度上决定着测量得到的地面影像图像的清晰度 [4]。针对无人机 上相机的误差校验, 可采用控制场检验方法实现。在校验的过程 中,按照公式(2)所示的校验模式完成校验。
公式(2)中, a 、b 表示为像方坐标 ;A 、B 、C表示为 物方坐标 ;l 和 i 表示为线性系数。根据上述公式(2),将其应用到测量系统的相机校验当中,提高相机的精度。除此之外,针 对测量系统获得的工程测量图像, 通过内方位元素方式, 实现对 其相机位置的校验。图2 为内方位元素结构示意图。

图2 中 I、II 和 III 表示为三个在内方位元素结构当中的点 ; S 表示为摄影中心 ;f表示为摄影中心 S 到图像的垂直距离。通 过内方位元素来决定摄影中心点, 从而得到图像的相对关系, 并 通过相对位置关系,对测量过程中相机的拍摄位置光束形状进 行确定 [5]。在上述确定相机光束形状的基础上,结合光学畸变差 原理从径向畸变和偏心畸变差, 对其产生的误差进行补偿, 其表 达式为。

公式(3)中, r 表示为向径 ;k 表示为径向畸变差系数。根据上述公式, 完成对畸变误差的补偿, 从而得到的最终结果即为 精准度较高的工程测量结果。
2 应用效果分析
通过本文上述论述,针对无人机低空摄影测量系统在工程 测量中的应用进行分析,为了进一步验证该系统应用后的工程 测量精度是否得到提升,本文选择以进行工程施工的项目为依 托,针对其工程测量任务,引入上述测量系统对其开展测量工 作。已知该工程项目总占地面积约为 152820 平方米,选择将该 测量区域内的东西方向及测量区域东侧的东北方向作为主要测 量路线。选择测量路线的左右各 300m 范围作为研究区域。在测 量前,首先对测量系统的各项参数确定,将地面分辨率设置为 0.1m,将航线间隔设置为400m,将焦距设置为 35m,将基准面设 置为 75%。分别针对测量区域内的平地和丘陵地两种地形结构 的五个测点进行测量,并将通过测量系统得出的结果与实地测 量结果进行对比。实地测量采用高精度工程测量仪完成。计算 本文测量方法的误差,误差计算公式为 :测量结果误差 = 实地 测量结果 - 本文测量方法测量结果。将结果绘制成如表 1所示。
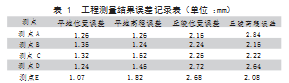
从表 1得出的测量误差记录结果可以看出,平地测量误差明 显小于丘陵地测量误差, 但表 1 中所有误差值均在工程测量精度 标准小于20.0mm 范围内,说明测量精度符合要求。因此,通过 将本文测量方法应用于实际进一步证明,利用测量系统对工程 项目中各测量点测量的精度满足实际要求。
3 结语

科技水平的不断提升促进了无人机低空摄影测量系统在工 程测量当中的应用水平提升,通过本文对该系统在工程测量当 中的应用进行研究, 进一步分析得出, 利用该系统能够在确保测 量精度,提高测量效率的基础上,保障测量技术人员的人身安 全,并实现对地形图的精准测绘。目前,由于该系统的固定成本 和软件部分的成本较高,在实际应用中仍然存在一定的局限性 问题。因此,作为现代测绘和未来测绘最重要的测量方式,还需 要对该系统进行不断地优化, 并进一步增加研究深度。
参考文献
[1] 郭海杰 . 论无人机航空摄影测量技术在工程测量和地质测绘中的应用 [J]. 世界有色金属 ,2021(10):155-156.
[2]张华阳 , 鲍健 , 王赛赛 . 浅谈无人机航拍技术在工程测量测绘中的应用 [J]. 网 络安全技术与应用 ,2021(02):137-138.
[3]谷潇 . 无人机机载激光雷达在地质测绘与工程测量中的应用研究 [J]. 应用激 光 ,2020.40(06):1126-1131.
[4]张明昭 . 无人机倾斜摄影测量技术在皮革生产厂房工程测量中的应用 [J]. 皮革 制作与环保科技 ,2020.1(07):40-41+44.
[5]朱勇 . 试论无人机低空摄影测量技术在水利工程测量中的应用 [J]. 城市建 筑 ,2019.16(17):161-162.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!

据媒体报道,三大运营商目前均已制定了2020年... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
