SCI论文(www.lunwensci.com)
摘要 :针对目前大部分自主水下航行器 (AUV) 采用预编程的工作模式不适用于动态海洋环境观测的问题, 开展了基于数据驱动 的控制系统研究 。为了实现对动态海洋环境的自适应观测, 提出了一种具备数据驱动能力的 AUV 控制系统设计 。该控制系统在总 体设计上采用双控制板的分布式架构并使用星形网络拓补结构方便内部通信以及后续设备拓展; 硬件设计上使用模块化思想管理 传感器并使用多种通信设备的融合工作保证通信的快速性与稳定性; 软件上使用多线程并行设计并在上位机添加手柄遥控功能; 最后通过仿真实验验证控制系统性能 。 实验结果表明该系统控制超调量为 3%; 滞后时间为 2 s, 满足海洋现象观测需要 。该控制 系统具备搭载数据驱动算法的能力, 为基于数据驱动的动态海洋观测模式提供了硬件平台。
关键词 :数据驱动,控制系统设计,自主水下航行器,自适应海洋观测
Design of An AUV Control System with Data-driven Capability
Shang Hong1. 2. Zhou Huanyin1※, Lang Cheng3. Zhu Xinke2. Liu Jun1. 2
( 1. College of Mechanical and Electronic, East China University of Technology, Nanchang 330013. China; 2. Second Institute of Oceanography, Hangzhou 310012. China; 3. Zhejiang Academy of Marine Science, Hangzhou 310012. China)
Abstract: Aiming at the problem that most automatic underwater vehicles (AUV) currently operate in a pre-programmed mode and are not suitable for dynamic ocean environment observation, a data driven control system was studied. To realize adaptive observation of dynamic marine environments, an AUV control system design with data-driven capability was proposed . The overall design of the control system adopts a distributed architecture of dual control boards and uses a star network topology to facilitate internal communication and subsequent equipment expansion; in hardware design, modular thinking is used to manage sensors and the fusion of multiple communication devices is used to ensure the rapidity and stability of communication; the software uses multithreading parallel design and adds a handle remote control function to the host computer; finally, the performance of the control system is verified through simulation experiments . The experimental results show that the control overshoot of the system is 3%; the delay time is 2 seconds, which meets the needs of ocean phenomenon observation. The control system has the ability to carry data driven algorithms, providing a hardware platform for data driven dynamic ocean observation modes.
Key words: data driven; control system design; autonomous underwater vehicle; adaptive ocean observation
0 引言
随着社会与科技的进步, 海洋资源的利用已迫在眉 睫 。想要利用海洋资源, 就必须对海洋有充分的认识, 近年来自主水下航行器 (Automatic Underwater Vehicle, AUV ) 在海洋探测领域得到了越来越广泛的应用[ 1-5] 。 目 前传统 AUV 的工作模式大多数是预编程[6], 即在岸上规 划好 AUV 工作路径, AUV 在作业时按指定路径运行 。预 编程工作模式在特定工作环境下有着两大优点: 一是功 耗低, 对实时环境数据的处理少, 因此不需相应传感器 的使用以及 CPU 的大量计算, 从而降低了功耗[7]; 二是 安全, 在规划路径时能提前避开障碍物或危险区域, AUV 航行过程中意外因素少, 可控性强[8] 。但预编程模式需要人员前期收集好被观测海域的资料才能规划出合 理的工作轨迹, 仅适用于长时间固定的海洋现象观测如 地形地貌等 。对于温跃层 、中尺度涡 、锋面等没有固定 规律且会随着时空变化的海洋现象, 传统预编程 AUV 面 临有限观测资源和覆盖范围之间的矛盾 。因此科学家希 望 AUV 能够在有限资源以及无人干预的情况下, 实时处 理采样环境的数据, 依据目标特征分布情况自适应调整 采样路径, 实现关键时空信息的自主采样[9- 10], 从而实 现自适应海洋观测。
基于数据驱动海洋环境模型指导下的水下机器人观 测, 是 实 施 自 适 应 海 洋 环 境 观 测 的 主 要 技 术 途 径 之 一[ 11] 。数据驱动思想起源于美国动态数据驱动应用系统 (Dynamic Data Driven Application System), 即预报过 程中能实时加入实验现场的动态数据, 对复杂系统有了 更好的预测, 评估以及优化[ 12- 13]。
在此基础上, 普林斯顿大学 、哈佛大学 、蒙特利海 湾海洋研究所 ( MBARI ) 等多家大学和研究机构联合实 施了自适应海洋采样网络 (Adaptive Ocean Sampling Net‐ work, AOSN ) 研究项目 。项目将水下机器人观测网络与 数值海洋模式综合集成构成闭环反馈系统, 基于网络获 取的观测数据可以提高数值海洋模式预报技巧的效用评 估进而反馈优化观测网络的观测策略和观测路径, 以达 到所需自适应观测目标的最优观测数据[ 14] 。MIT 的“自 适应环境评估”(Autonomous Adaptive Environmental As‐ sessment, AAEA ) 算法[15]让 AUV 可以在无人监控情况 下, 获取以温跃层为代表的海文跃层四维信息 (空间+ 时间), 依据预编程分类的情况, 判断出关键区域, 然后 以此为依据改变 AUV 自身的航行状态, 取得了很好的海 洋观测效果。
但传统预编程 AUV 多数使用一块控制板作为主控, 各功能模块间耦合性强, 很容易牵一发动全身, 存在功 能修改困难等多种问题, 无法胜任搭载数据驱动算法的 实验 。因此结合数据驱动算法模型指导实践的特点以及 研发过程中的海洋科学家与工程师跨学科配合问题[16], 本文在传统预编程控制系统基础上做出改进, 将自主系 统与控制系统分离, 设计了一种分布式 、高性能 、拓展 性强 、具有预编程和数据驱动两种工作模式 、可根据任 务需要灵活选用的新型 AUV 控制系统 。本文将从总体架 构 、硬件控制系统 、软件控制系统 3 个部分展开介绍, 并进行仿真实验验证系统控制效果。
1 系统总体架构
本文设计的 AUV 采用双控制板的系统架构, 一块底层运动控制板 、一块数据驱动控制板, 如图 1所示 。预编程工作模式由底层运动控制板单独工作, 按 步骤读取任务指令逐步执行 。数据驱动工作模式下底层 运动控制板专门负责 AUV 的运动控制, 航行中推算并记 录当前位置发送给数据驱动控制板 。数据驱动控制板负 责海洋观测数据的获取处理并结合接受的位置信息在数 据驱动算法的作用下建立数值海洋模型, 在模型的指导 下规划下一阶段工作路径并交于底层运动控制板执行, 再根据新路径的观测数据优化海洋模型 。这种分布式设 计的好处是将 AUV 的自主系统与控制系统分离, 不仅提 高了运算速度, 对 AUV 的控制也更加高效。
海洋观测以及海洋探索属于多学科交叉领域, 需要 海洋科学家与工程师密切配合, 分布式的设计有利于两者的协同工作 。海洋科学家专注于海洋观测数据的收集 与分析, 实现数据驱动, 对应数据驱动板 。工程师专注 于 AUV 的底层运动控制, 实现 AUV 的平稳控制, 对应底 层运动控制板 。双方都不必了解对方的运作机制, 也无 需为对方做适配, 只需预留通信接口规范好通信即可。两 者相互独立, 各自的后期功能修改也不会影响对方运行。
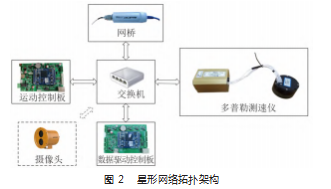
为满足两块控制板之间高效安全且具备一定拓展性 的通信 。系统选用星形网络拓扑结构, 把交换机作为中 心节点, 网桥 、运动控制板 、数据驱动控制板以及多普 勒测速仪等作为分节点接入, 如图 2 所示 。整个 AUV 内 部通过交换机组成了一个小局域网, 不仅内网中设备之 间的传输速度和传输稳定性极佳, 并且拓展方便, 后续 传感器的添加如水下摄像头等也可通过交换机网口直接 接入系统。
控制板连接无线网桥并具有 Linux 系统的 SSH 远程登 录功能 。当 AUV 在水面上或者调试阶段时, 研究人员可 借助 Xshell 等软件登录控制系统来进行远程更新程序 、 传输数据文件等操作。
2 硬件控制系统设计
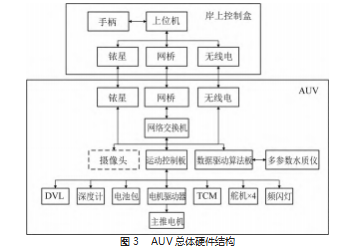
AUV 控制系统由水面控制盒和水下机器人本体两大 部分共同组成 。水面控制盒搭载上位机软件, 可以对机 器人本体进行系统设置 、任务指令下达 、观测数据的回 传等操作 。具体硬件结构如图 3 所示。
2.1 水面控制盒硬件设计
水面控制盒由便携式电脑主机, 手柄 、通信模块 (铱星, 无线电, 无线网桥) 等共同组成。
水面控制盒使用冗余通信设计, 采用铱星 、无线电、 无线网桥 3 种方式与水下机器人通信 。铱星为卫星通信, 通信范围大, 但通信费用高昂 、延迟较高, 适合在任务 结束后上报 GPS 位置或者紧急情况通信使用 。无线电通 信范围小, 但实时性高, 适合 AUV 调试以及手柄遥控。 无线网桥通信范围是三者最小的, 但数据吞吐量大且可 靠, 适合用于观测数据的回传以及任务指令的下达 。3 种通信手段的同时使用确保了水面控制盒同时具备通信 范围大, 实时性, 传输速度快 3大优点。
2.2 AUV 硬件设计
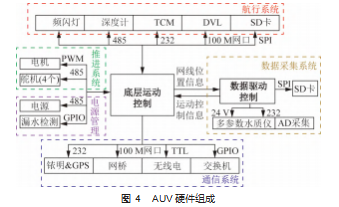
AUV 内部传感器众多, 按照功能划分为航行系统、 推进系统 、电源管理系统 、通信系统 、数据采集系统 5 大系统, 如图 4 所示。
航行系统由 DVL (多普勒测速仪), TCM (电子罗 盘), 深度计等传感器组成, 提供 AUV 的航向 、姿态 、 速度 、深度等数据供控制系统参考决策, 保证 AUV 的稳 定航行。
推进系统由舵机和电机组成, 采用舵后浆 、十字舵 结构, 4 个舵叶独立驱动, 通过不同组合可实现载体转 艏与俯仰控制, 主推进器电机的正反转可实现载体的前 进和后退。
电源管理系统包含电池包与漏水检测, 电池包自带 管理芯片, 通过 485 通信串口可查看电池的电压电流电 量等各类信息, 漏水检测是自行设计的铜板, 放置舱底 交错排列, 一旦舱内有水渗入接触到铜板, 两极导通立 即向控制板发送警报。
通信系统包含无线电, 网桥, 铱星, 交换机等多种 通信设备, 负责 AUV 内外部的通信工作。
数据采集系统包含多参数水质仪和 AD 高精度模数 转换芯片, 可采集温度 、电导率 、浊度 、叶绿素等多种 水质参数并储存在 SD 卡中, 为数据驱动控制板的数值海 洋模型的建立提供数据支撑。
主 控 核 心 板 型 号 为 ESM6802. 该 板 采 用 NXP i. MX6DL ARM Cortex-A9 双核处理器, 预装 Linux-4. 1. 15 系统平台, 工作电压为 5 V。
最后综合上述硬件, 结合不同传感器的不同工作电 压以及通信接口 ( RS485 、232 等) 设计了对应的驱动电 路, 同时为了节省电量, 为每个用电设备配置了 MOS 管 开关进行单独控制, 按需开启 。在 ESM6802 的基础上设 计出符合工作要求的拓展电路板如图 5 所示。
3 AUV 软件系统
3.1 AUV 上位机
上位机控制软件基于 QT6.0 平台使用 C++语言编写, 其界面如图 6 所示 。上位机的功能包括: ( 1 ) 任务规 划, 给 AUV 下达具体的工作指令, 控制 AUV 执行完整的 任务; (2 ) 设备调试, 调试 AUV 设备时, 监控软件可以 下达各种调试指令, 单独控制 AUV 的外设和监控不同外 设的信息; (3 ) 控制系统设置, 进行各种设置系统, 如 最低工作电压, 选择日志记录内容等; (4 ) 接收观测数 据回传, AUV 在工作完毕浮出水面后会与上位机建立远 程连接, 上位机会接收储存 AUV 回传的观测数据。
针对 AUV 在特殊情况的位置微调需要, 上位机专门 设计了手柄控制的功能 。开启遥控功能后软件后台会调 用 Windows 封装的 Winmm 库中的捕捉函数, 采集并处理 手柄的按键 、摇杆位置等信息, 在上位机界面上实时显示并通过无线电发给 AUV 。AUV 接受信息后修改电机的 转速和舵机的舵角, 从而实现远程遥控 AUV 的功能 。 可以在布放或回收时手动调整 AUV 的位置避免与障碍 物碰撞。
3.2 水下控制系统
水下控制系统基于 Linux 使用 C 语言编写, 采用多线 程设计, 下文就软件结构和通信流程两方面展开介绍 。
3.2. 1 软件结构
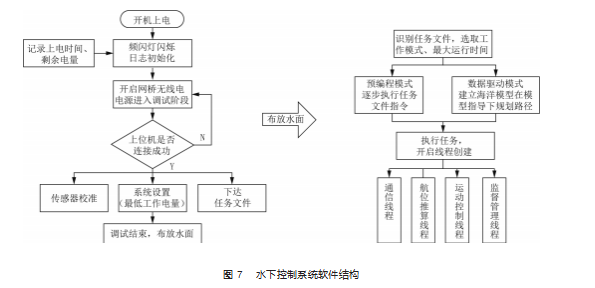
AUV 启动上电成功后频闪灯点亮, 随后进入调试模式, 在调试模式下 AUV 会和上位机建立通信进行系统的 设置 、传感器校准 、任务文件的下达等 。调试完成后, AUV 布放水面, AUV 读取任务文件选择工作模式后进入 工作线程创建函数, 创建通信 、航位推算 、运动控制、 监督管理 4 大线程 。软件运行流程如图 7 所示。
各个线程功能介绍如下。
通信线程: 负责 AUV 内外界通信数据的预处理和传 输 。根据通信协议识别指令对应的操作并执行, 对数据 进行滤波 、剔除野值等预处理, 执行操作完成后执行状 况反馈。
航位推算线程: 因水下通信困难, AUV 只能根据铱 星获取的入水点坐标再加上 DVL 和 TCM 提供的速度信息 和姿态信息通过航位推算算法实时计算 AUV 的坐标位 置, 保证航向准确 。定时上浮水面, 通过 GPS 获取新的 坐标矫正误差。
运动控制线程: 使用 PID 控制算法对舵角和电机推 力调节到目标位置, 完成 AUV 工作所需的指定深度, 指 定航向, 指定速度要求。
监督管理 (主线程): 读取任务文件并拆分逐一执行, 持续进行电量检测管理及漏水检测如电量低于阈值 或漏水则停止作业立即上浮水面报警, 程序执行日志的 保存。
3.2.2 通信流程
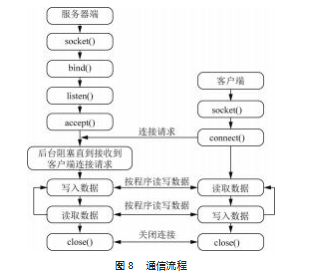
星形网络拓扑结构软件使用 Socket 编程完成设备之 间的通信 。Socket 是应用层与 TCP/IP 协议通信的中间软 件抽象层, 它是一组接口 。它把复杂的 TCP/IP 协议隐藏 在 Socket 接口后面, Linux 内核向应用层提供了 Socket 接 口, 开发人员只需要调用 Socket 接口开发即可应用程序。 Socket 简单易用, 还是一个标准 (BSD Socket), 能在不 同平台之间移植。
实际应用流程如图 8 所示。
服务端调用 socket()函数初始化, bind()函数进行 IP 地址 、端口号的绑定, listen()函数让服务器进入监听状 态, 收到客户端 connect()请求后, 服务端调用 accept()函 数接收请求, 双方建立连接后使用 read() 、write()函数通 信, 通信完成后都调用 close()关闭套接字, 结束通信。
4 实验与结果分析
4.1 仿真实验环境
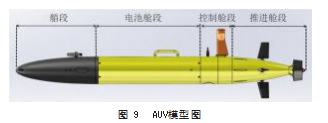
本文设计的 AUV 仿真模型如图 9 所示, 采用多段式设计, 由艏段 、电池舱段 、控制舱段 、推进舱段组成 。 艏段是开放舱体, 放置了多参数探测仪可以收集水体信 息; 电池舱放置了定制的锂电池, 为整个 AUV 的能源供 应; 控制舱段是整个 AUV 的大脑, 放置了控制板, 电机 控制器和诸多传感器; 推进舱段放置舵机和电机, 负责 AUV 的推进和姿态控制, 结构上采用十字舵, 舵后浆的 形式 。各个舱段之间通过水密接插件和水密线缆进行连 接 。仿真模型[17] 、环境参数具体如下。
质量 m=185 kg; g=9.85; 浮力 B=mg; 重心 g(Z)=0.01; 浮心 Zb=-0.01; 阻力系统 u(X)=-70 kg/m,=-100 kg/m; 水平面水动力系数 Yv = -100 kg/m; Y| v |v = -200 kg/m; 垂 直面水动力系数 Zw = -100 kg/m, Z| w |w = -200 kg/m; 垂 直 面 角 速 度 系 数 Mq = 50 kg ⋅ m2 /rad2. M| q |q = -100 kg ⋅ m2 /rad2; 水平面角速度系数 Nr = -50 kg ⋅ m2 /rad2. N| r |r = -100 kg ⋅ m2 /rad2.
4.2 控制实验
为检测该分布式控制系统的实际可行性, 即数据驱 动控制板能否通过与底层运动板的通信稳定控制 AUV运 行, 开展了仿真实验。
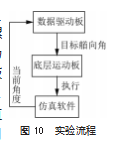
本次实验模拟 AUV 在海平面上的海洋锋面边界搜寻工作, 设艉部螺旋桨提供的推力恒定, 水平舵数值为0. 只调节垂直舵, 数据驱动控制板给底层运动控制板发送目标艏向角,底层运动控制板接受并通过调整垂直舵的舵角的方式来改变力矩从而调整艏向角, 仿真软件模拟运行并实时返回模型 AUV 当 前艏向角信息给数据驱动板。
整个控制实验控制 AUV 的艏向角在±100 °之间, 仿 真时间为 100 s, 结果如图 11所示。
4.3 实验结果分析
图 11所示数据驱动控制板能够稳定控制 AUV航行并
按指定角度方向折返, 满足搜寻锋面边界工作所需的锯 齿形轨迹 。 由于环境设置有着水流阻力的情况, AUV调 整到实际航向角的时间比期望航向角滞后 2 s, 在正常工 作航速 3节时误差约为 3 m, 但相较于锋面 、中尺度涡几 十至上百千米不等的覆盖范围来说误差比例极小, 属于 正常工作误差范围。
综上所述, 本文设计的数据驱动控制板可以通过与 底层运动控制板的通信对 AUV进行有效控制, 让其运行 在期望轨迹上, 该设计具备搭载数据驱动算法, 进行数 据驱动模式工作的能力基础。
5 结语
本文介绍了传统预编程 AUV的优点与局限性, 为实 现自适应观测引入了数据驱动概念 。针对传统预编程 AUV 大多仅有 1块控制板, 导致功能修改困难, 难以搭 载数据驱动算法等缺陷, 本文对传统控制系统的控制系 统与自主系统的进行分离, 设计了一种新型双模 AUV分 布式控制系统, 介绍了其总体架构 、硬件的选型 、电路 设计, 上位机和水下控制系统的软件结构与所实现的功 能 。通过对艏向角的控制仿真实验验证了该设计的分布 式控制系统能够正常工作, 为数据驱动算法提供了硬件 平台支持 。后续将移植数据驱动算法进行湖泊实验和海 域实验, 进一步验证数据驱动模式设计并优化 AUV 的控 制性能, 以实现能根据工作环境不同自由选用工作模式 的智能观测 AUV。
参考文献:
[1] 侯海平, 付春龙, 赵楠, 等 . 智能自主式水下航行器技术发展 研究[J]. 舰船科学技术, 2022. 44(1): 86-90.
[2] GAFUROV S A, KLOCHKOV E V. Autonomous Unmanned Un ‐ derwater Vehicles Development Tendencies[C]// 2nd Internation‐ al Conference on Dynamics and Vibroacoustics of Machines (DVM 2014), September 15-17. 2014. Samara, Russia. Samara: Procedia Engineering, 2015: 141-148.
[3] 曾俊宝, 李硕, 李一平, 等 . 便携式自主水下机器人控制系统 研究与应用[J]. 机器人, 2016. 38(1): 91-97.
[4] 张艺博, 李万钟, 李伟斌 . 两栖仿生机械鳄鱼的设计及水下应 用[J]. 机电工程技术, 2022. 51(11): 108-111.
[5] 万程, 周焕银, 刘国权 . 基于 PID控制器的遥操作水下机器人 航向运动研究[J]. 机电工程技术, 2022. 51(5): 108-111.
[6] 黄琰, 李岩, 俞建成, 等 . AUV 智能化现状与发展趋势[J]. 机器 人, 2020. 42(2): 215-231.
[7] 高彬彬 . 基于 ROS 的 AUV嵌入式控制系统研究与设计[D]. 杭 州: 杭州电子科技大学, 2020.
[8] 朱心科, 侯斐, 孟肯, 等 . 较强海流中的低速水下机器人路径 优化[J]. 海洋技术学报, 2021. 40(6): 54-60.
[9] HWANG J, BOSE N, FAN S. AUV adaptive sampling methods: a review[J]. Applied Sciences, 2019. 9(15): 3145.
[10] 胡忆晨 . 基于 AUV 平台的海洋环境自适应跟踪方法研究 [D]. 杭州: 浙江大学, 2021.
[ 11] 关浩博 . 数据驱动的水下机器人海洋环境自适应观测研究 [D]. 沈阳: 沈阳工业大学, 2021.
[ 12] 许正昊, 张小和, 张洋洋, 等 . 动态数据驱动应用系统仿真研 究综述[J]. 机械工程师, 2014 (4): 94-97.
[13] 金乾隆, 田宇, 俞建成, 等 . 基于 DDDAS 的海洋机器人环境流 场估计与自适应观测系统[C]//中国自动化学会控制理论专业 委员会, 中国自动化学会, 中国系统工程学会 . 第三十九届中 国控制会议论文集(7). 沈阳: 东北大学, 2020: 1062- 1068.
[ 14] CURTIN T B, BELLINGHAM J G. Progress toward autonomous ocean sampling networks[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 2009. 56(3-5): 62-67.
[15] STEPHANIE P, ARJUNA B, HENRIK S. Autonomous adaptive environmental assessment and feature tracking via autonomous underwater vehicles[C]// OCEANS 2010. January 24-27 2010. Australia Sydney. New York: IEEE, 2010(1): 1-9.
[16]金久才 . 无人海洋可控探测平台的智能观测技术[D]. 青岛 : 中国科学院研究生院(海洋研究所), 2011.
[ 17] 罗建超, 朱心科 . 基于改进粒子群优化算法的自主水下航行 器深度控制[J]. 舰船科学技术, 2022. 44(8): 64-68.
作者简介:
尚 红 ( 1998- ), 男, 硕士研究生, 研究领域为自主式水下航 行器控制系统。
朱心科 ( 1980- ), 男, 河南平顶山人, 博士, 高级工程师 (教 授级), 研究领域为海洋观测技术与方法, 已发表论文10 余篇。 ※通讯作者简介 :周焕银 (1975- ), 女, 河北衡水人, 博士, 教授, 研究领域为水下机器人运动控制, 已发表论文 20 余篇。
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61464.html