SCI论文(www.lunwensci.com):
摘要:为提升液车辆行驶的可靠性与安全性,基于单片机提出一种间歇制动控制系统的设计。分析了车辆的滑移机理,得出逻辑门选取的依据和发生滑移率过大的主要因素。对控制系统的关键组成进行了设计,包括单片机、时钟电路、电控单元、传感电路等。系统采用PID控制策略,单片机选取MSP430F149系列。应用硬件与软件协同运行的抗干扰策略,有效地降低数据采集误差,提升控制状态的灵敏度并增强RAM安全性。该系统性价比高,功耗较低,具有良好的工程应用效果。
关键词:控制系统;单片机;制动;车辆
Design of Intermittent Braking Control System Based on Single Chip Microcomputer
Li Ren,Duan Benchang
(Tengzhou Secondary Vocational Education Center School,Zaozhuang,Shandong 277599,China)
Abstract:In order to improve the reliability and safety of hydraulic vehicles,a design of intermittent braking control system based on single chip microcomputer was proposed.The sliding mechanism of the vehicle was analyzed,and the basis for selecting the logic gate and the factors causing excessive sliding rate were obtained.The key components of the control system were designed,including single chip microcomputer,clock circuit,electronic control unit,sensor circuit and so on.The system adopts PID control strategy,and the MCU selects MSP430F149 series.The anti-interference strategy of cooperative operation of hardware and software can effectively reduce the data acquisition error,improve the sensitivity of control state and enhance the security of RAM.The system has high cost performance,low power consumption and good engineering application effect.
Key words:control system;single chip;braking;vehicle
0引言
车辆在行驶过程中,如果发生紧急制动,车轮与制动器容易因抱死而发生打滑[1]。因此,采用科学的技术手段进行间歇制动,能够有效地确保制动距离,降低安全事故发生的概率。由于制动系统一般为液压或气压控制,油液压力易于采用电控系统实现智能控制[2],从而有效提升制动力矩的有效性。紧急制动过程中的油压提升速率较高,在较高的压力响应环境下,车轮与地面的附着系数将发生瞬时变化,导致摩擦副的滚动摩擦变为滑动摩擦。为有效避免连续制动带来的安全失效,文中对一种间歇制动控制系统进行设计与研究,能够基于单片机的控制将制动力进行智能调节,从而不会出现因压力过载出现的拖滑问题。根据制动机理[3]可知,惯性是影响车辆滑动摩擦的关键因素之一,而间歇制动压力保持的时间和大小均依据车辆的承载和行驶状态。因此,系统重点考虑多个外界因素的影响,提升信号检测的可靠性和稳定性。
间歇制动控制系统包括检测单元、信号处理单元、控制单元和执行单元等。其中,检测单元主要由速度传感器、压力传感器等组成。各个电控单元之间的响应效率非常高,能够根据车辆的位姿状态判定运动状态。在单片机的控制下,各个检测信号能够转换为制动压力的控制信号。在闭环反馈作用下[4],制动力矩能够获得精确的调节效果。
1间歇制动原理
1.1滑移过程分析
车辆的滑动方向包括横向和纵向,车轮与地面在不同方向上的附着系数对滑移率[5]的影响效果不同。一般来说,高频间歇制动条件下的附着系数更高,因此车辆与地面的滑移率更低。与间歇制动控制相关的外界因素较多,主要包括:车辆承载重量、路面摩擦因数、行驶速率等。这些外界因素共同影响了附着系数。在控制系统中,各路传感器[6]将根据车辆在单位时间内的运动学参数对附着力进行计算,将滑移率保持在稳定的范围内。通过分析可知,当车辆的横向附着力更大时,能够获得更好的制动效果,制动距离的控制也更稳定。
在电控系统中,信号的处理形式主要为逻辑门的控制,即针对不同的检测信号进行逻辑门运算,已获得最佳的速度控制效果。由于滑移率的最终表现为车辆制动失效和打滑,因此应当设定合理的限速门。当减速变化超过限速门数值时,应当及时解除连续制动。目前,对于逻辑门选取的依据和发生滑移率过大的因素主要有。
(1)当地面为水面或者冰冻面时,摩擦因数小,使得车辆
行驶过程中与地面之间的附着力难以提升,此时路面压力将随着车辆速率的增大而急剧降低。
(2)当路况不均衡时,即车辆从高附着系数路面向低附着路面行驶,车辆发生抱死的概率较高,因此,限速门应当为动态的。
(3)当车辆在低档位进行制动时,由于驱动力较大,车辆也有发生抱死的可能性。
1.2间歇制动控制方案
针对车辆发生滑移的问题和影响因素,文中间歇制动控制系统采用PID控制策略作为闭环[7]方案。在PID控制算法中,需要两个控制器串联实现滑移率信号的转换和调节。对于制动系统,油压的改变属于控制内环过程,因此,在建立闭环控制算法时,无需再重新构建制动模型,仅需要根据不同的工况预设PID控制参数即可。
在控制系统设计中,对PID参数的调节[8]是非常重要的。由于该控制方案的灵敏度较高,能够在复杂多变的工况下得到较为准确的输出信号,同时也会在实际操作中出现干扰性过大等问题,从而在一定程度上降低了系统的稳定性。
2电控系统设计
2.1核心控制器
在工程上,单片机得到广泛和良好的应用,能够基于单片机实现微系统设计[9],性价比较高,且性能稳定。对于间歇制动控制系统,单片机可结合复位电路、振荡电路、电源电路、复位电路等实现完成的控制回路[10],组成较小且功能完备的控制单元,系统的总体组成如图1所示。
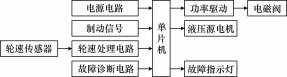 图 1 系统组成
图 1 系统组成
根据控制目标法,文中选取MSP430F149芯片作为核心控制器。该类型的芯片具有较小的功率损耗,且内置了2 kB的RAM,串口数量较多,能够实现稳定的中断功能。此外,单片机还集成了模数转转器、寄存器等,能够在间歇制动系统中获得良好的应用效果,表现出得主要优势包括。
(1)有效运行环境温度范围较大,能够在-40~+85℃保持电气元件的可靠性和稳定性;供电电压较低,有效取值为1.8~3.6 V。
(2)能够实现程序的实时编译和修改;工作模式为1 MHz的时钟频率,能够在多种节能模式下工作,其中,待机电流为0.1 A。
(3)能够在复杂环境下抵抗较强的干扰,具备多重保护功能;具有多个时钟电路,系统调控灵活且易于实现。
(4)具有稳定的中断功能,在待机模式下转变为工作模式所需的时间较短,反应灵敏;通讯效率高,不会出现误码问题。
2.2时钟电路设计
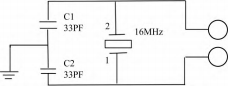
时钟电路对于控制系统非常重要,其能够有效地监测不同电气元件以及控制回路的工作状态。若出现异常,也可以通过时钟电路进行判断故障或问题。对于单片机控制系统,设计时钟电路如图2所示,能够有效地影响其实际的工作效率,因此,对间歇制动的响应速度有着重要的影响。
图2时钟响应电路
车辆行驶速率或车轮转速是间歇制动控制系统的主要数据采集对象之一,该数据的可靠性和准确性是影响系统功能的关键[11]。为此,文中优先选择霍尔传感器作为转速传感器,能够有效地识别轮速,并将转速信号转换为数字信号。由于单片机的采集信道均为高速通道,因此非常便于波形的转换。
2.3传感电路设计
传感电路能够有效地确保各路传感器能够正常和稳定的工作,设计其结构如图3所示。相比普通的外围,单片机端口传感接线电路的优势在于:
(1)能够有效地监测不同端口处被测对象的瞬时状态,并且在能够根据程序记录不同条件下的输入和输出日志;
(2)系统设置有多种寄存器供选择,对于同一事件能够选取最佳的记录方式,便于传感器与单片机的信号处理;
(3)具有多通道输入,传感器的可拓展性强,能够根据系统功能设计要求增加对应硬件。
图3传感电路接线图
霍尔传感器内部具有齿轮结构,其磁性和磁力与齿轮的位置状态有关。转速测量并处理后,将在单片机作用下转变为控制信号,进而控制电磁阀动作。电磁阀的驱动除了包括继电器、晶体管、闸管等之外,还包含外部放大电路,用于传感器信号的缩放处理。为确保系统的性价比要求,系统采用共射极放大电路来驱动电磁阀电路。
2.4电控单元设计
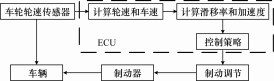
图4电控单元控制原理
电控单元是间歇制动控制系统的核心组成部分,其工作原理如图4所示。电控单元以单片机为中央控制器,能够将各路传感器的信号进行收集与处理,最终以电信号的形式输出。当信号确立后,系统将调用对应的控制算法[12],驱动电磁阀动作,从而实现油压的控制。
在电控单元中,车辆的行驶状态以车轮单侧传感器检测到的脉冲信号作为依据。为确保该信号的可靠性,需要基于光电耦合器对被测信号进行隔离,然后进行高低电平的切换,结合电信号的整形处理,最终输送至单片机控制端,进行相关指令的运算。光电耦合器是电控单元的重要组成部分,其最大输出电流为15 mA,远小于传感单元的输入电流,因此需要进行功率运算放大处理。针对系统的功能设计,优先选用1.5倍的放大元件。2.5预警设计
为确保系统工作的安全性,设置预警单元。其中,发光二极管的接线电路如图5所示,能够与单片机直连。当检测到系统出现异常或者发生滑移失效时,驱动器将释放低电平信号,此时发光预警。此外,为进一步提升被测信号的安全性和抗干扰性,设置独立的滤波屏蔽电路,并将电容外接,确保各个电路的基准电位保持一致,能够从电信号方面避免干扰。
图5发光二极管电路
2.6抗干扰策略
在间歇制动控制系统中,受到的干扰因素较多,比如电磁信号、电压波动、兼容性拓展、设备安装、突发路况等。为确保系统的可靠性,需要对各个干扰特性进行分析,并提出抗干扰方案。针对系统主要组成和功能,分析抗干扰因素及策略如下。
(1)降低数据采集误差。在基于单片机控制的信号检测与控制系统中,模拟信号的数据往往会受到外部因素的影响,比如传感器的安装位置,工作状态等。因此,应合理布局检测单元。
(2)提升控制状态的灵敏度。由于单片机的受控数据容量较大,被环境因素干扰的概率较高,因此需要增大反馈灵敏度。被测数据的逻辑运算包含着干扰数据,因此在虚拟状态下对这些信号进行预处理能够有效地提高控制的稳定性。在反馈系统中,可调试并降低偏差。
(3)增强RAM安全性。一般情况下,RAM集成在单片机中,当被测数据量较大时需要拓展。当系统出现较强的干扰信号时,RAM中的数据可能发生部分失效甚至破坏。因此,应选取具有保护功能的外部RAM,或在软件控制中增加保护程序。
(4)软件控制的抗干扰设计。在间歇制动控制系统中,程序计数器能够有效地确保整个控制流程的顺利进行。当系统出现较强的干扰因素时,计时器将发生明显改变,进而影响后续信号的逻辑运算。由于干扰具有显著的随机性,因此需要采用程序来约定指令的有效性。软件控制的抗干扰设计能够避免功能死循环,结合硬件技术,能够实现更好的效果。比如,增加隔离电路、接地电路等。
2.7路面识别设计
路面识别能够有效地确保信号检测的可靠性和准确性,目前常用的方法主要基于速度测量,包括五轮仪以及普勒雷达等两种形式。由于后者的成本费用较高,因素应用较少。在五轮仪的基础上,结合霍尔传感器,能够有效地判定路面状态,为滑移率的计算提供重要依据。
在进行路面识别计算时,主要应用高速输入通道HIS设定方式。由于系统所采用的单片机具有多通道高速接口,因此可以将其应用于每个轮轴。在预设的中断程序控制下,每个通道将分布式处理被控信号。不同的触发指令对于信号检测和处理的方式均有明显的影响,当路面检测程序运行时,将在单片机特定的通道中确定对应的中断程序。如果该控制对象为首次触发中断,将在初始寄存器中写入HIS-TIME内容。不同寄存器之间的差值是决定轮速子程序调用的关键,当子程序运行完成后,将返回主程序。
3结束语
随着电气自动化技术的发展,车辆行驶的安全性越来越高。传统的机械式制动逐渐朝着电子化方向改进,而且在各个领域内的车辆有着不同的应用效果。本文通过对间歇制动控制系统的设计与研究,将单片机有效地应用在制动系统中,能够为特定车辆的一体化改造提供良好的方向。滑移率是多方面因素影响的结果,为改善系统控制的可靠性,需要将汽车行驶状态等外部因素进行综合、准确地衡量。在单片机控制下,PID控制策略能够获得良好的应用效果,进而改进系统的可靠性和稳定性。车辆的安全制动离不开驾驶员的合法合规操作,即使车辆的自动化程度飞速发展,也要从根本上发挥安全行驶的作用。
参考文献:
[1]董振铭.基于车辆的动力学研究设计的一种控制安全制动系统[J].轻工科技,2019,35(12):64-65.
[2]来飞,黄超群,董红亮,等.智能汽车极限工况下联合制动与转向的自动紧急避撞研究[J].汽车工程,2021,43(6):851-860.
[3]刘云庭.提升机制动性能的影响机理的研究[J].机械管理开发,2020,35(3):95-96.
[4]李艳,张安龙,黄福全.考虑闭环运行方式的配电网网络化保护方法[J].机电工程技术,2019,323(2):85-89.
[5]苑磊,何仁.基于线性自抗扰控制的汽车ABS滑移率控制研究[J].汽车工程,2021,43(9):1367-1374.
[6]王延年,李雄飞.基于单片机的差压式液位监控系统设计[J].电子设计工程,2022,30(2):69-72.
[7]徐吉祥,沈静静,蒋一,等.基于单片机的智能窗帘系统设计[J].产业与科技论坛,2022,21(1):34-35.
[8]于淼,王巧梭.单片机控制系统的抗干扰设计的研究[J].南方农机,2021,52(14):157-159.
[9]刘康,程尹力.PID电机控制系统设计[J].电子世界,2021(20):158-159.
[10]张甜.基于锁相环的电路自动增益控制系统设计[J].自动化与仪器仪表,2021(9):91-95.
[11]石磊.污水处理系统中的自动控制系统设计[J].集成电路应用,2021,38(9):158-159.
[12]龙晓莉,谢斌盛,陈新兵,等.基于AT89C52单片机的搬运机器人控制系统设计[J].计算机测量与控制,2021,29(7):122-126.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/49748.html