SCI论文(www.lunwensci.com):
摘要:为了实现4台风机的远程、智能、高可靠性控制,同时需要满足调试方便、每台风机能够正转、反转的功能。提出了一种采用本地控制系统与远程终端指令控制相结合的控制方法,设计了一台本地控制系统。本地控制系统有3种工作模式,分别为手动控制模式、自动控制模式、遥控控制模式,可以通过模式开关进行工作模式切换,同时也能够根据预设的控制逻辑进行自动控制模式与遥控控制模式之间的自动转换。手动控制模式下可以根据面板的风机控制开关控制每台风机的正转、反转及停止;自动控制模式可以根据环境温度自动控制每台风机的正转及停止;遥控控制模式下可以根据远程终端的命令控制每台风机的正转、反转及停止。本地控制系统开机后还能够按照50 ms的周期进行采集环境温度及风机的运行状态等信息,并把这些信息外发给远程终端。远程终端选用带有网口的通用计算机或智能终端即可,采用该方法研制了一套样机,该样机已无故障运行17个月,3种工作模式都能正常工作。
关键词:风机控制;手动控制;自动控制;遥控控制
Design and Application of Intelligent Fan Control System
Li Chong,Wang Jianfei,Zhao Zhen
(Air Force Equipment Department of the Military Representative Office in Changchun,Changchun 130102,China)
Abstract:In order to realize the remote,intelligent and high reliability control of the four fans,it is necessary to meet the functions of convenient debugging and forward rotation and reverse rotation of each fan.A control method combining local control system with remote terminal command control was presented,and a local control system was designed.The local control system has three working modes,namely manual control mode,automatic control mode and remote control mode.The mode can be switched by mode switch,and the automatic conversion between automatic control mode and remote control mode can also be carried out according to the preset control logic.In manual control mode,forward rotation,reverse rotation and stop of each fan can be controlled according to the fan control switch on the panel.Automatic control mode can automatically control the forward rotation and stop of each fan according to the ambient temperature.In remote control mode,the forward,reverse and stop of each fan can be controlled according to the command of the remote terminal.After the local control system is started,it can collect the ambient temperature and fan running status every 50ms and send the information to the remote terminal.The remote terminal can be a general computer or an intelligent terminal with a network port.A prototype was developed by using the method.The prototype has been running without failure for 17 months,and all three working modes can work normally.
Key words:fan control;manual control;automatic control;remote control
0引言
通风系统广泛应用于矿井、矿山、隧道等场所,是这些场所环境保障非常重要的一个组成部分。现阶段有很多通风系统的工作环境恶劣,安装及维修困难,所以采用无人值守的智能风机控制系统是大势所趋。现有的智能风机控制系统控制策略及控制逻辑基本都是在工业计算机上实现的[1-4],通常有现场监测及控制层、中央管理层、远程监控层等。这种模式的优点是计算机计算能力强,控制策略可实现多样化,拓展能力强,一套系统可控制多台执行单元。缺点是成本比较高,用为计算机自身原因,系统可靠性一般不是很高[5]。
现在使用的基于嵌入式控制系统的风机控制系统,主要是基于PLM控制器进行开发的[6-7],少部分是利用DSP及ARM等单片机[8-9]进行开发的。嵌入式控制系统的优点是系统可靠性较高,成本相对较低,缺点是开发的难度较大,且因为系统资源的限制,计算速度较低,控制的智能化不高,系统的可拓展性差。
本文根据远程、智能、高可靠性控制的需求特点,同时需要满足调试方便、每台风机能够正转、反转的功能,结合经济性需求,提出了一种本地控制系统与远程终端指令控制相结合的控制方法。远程终端选用带有网口的通用计算机或智能终端即可,本地控制系统设计为基于DSP+FPGA架构的嵌入式风机控制系统,DSP选用具有浮点计算功能的芯片。利用浮点DSP的强大计算能力和FPGA的可塑性,增强该嵌入式系统的计算速度,增强了系统的可拓展性,提高了系统的智能化水平。
1系统组成
智能风机控制系统由本地控制系统和远程终端组成,系统组成如图1所示。
本系统选用在原有的计算机上开一个进程执行远程终端功能。远程终端只需具有网络通讯功能且能够按照通讯协议收发信息即可,此类设备为通用设备,在本文中不再赘述。
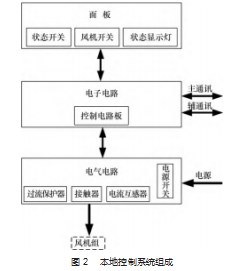
本地控制系统主要由面板、电子电路及电气电路3部分组成,如图2所示。
其中面板上的状态开关用于手动控制、自动控制、遥控控制这3种工作状态的转换。电子电路主要由控制电路板、温湿度传感器等组成,控制电路板用于采集温湿度传感器、状态开关、风机开关、电流互感器等信息,接收主、辅通讯口的控制命令,根据这些信息及预设的控制逻辑控制接触器,从而达到控制风机的目的,并把采集到的环境信息及风机运行信息通过主、辅通讯口外发给远程终端。电气电路用于弱电信号和强电信号的转换,主要由电源开关、过流保护器、接触器、电流互感器等电气元器件组成,用于执行风机的开关、测量风机的工作电流及对风机的保护等。
2系统功能及工作原理
本地控制系统能够控制4台风机工作,正常工作时2台风机为一组,一台用于进风,一台用于出风,利用2组风机通风对工作场所进行降温。本地控制系统具有电源缺项保护功能、过流保护功能和风机过热保护功能等保护功能。本地控制系统有3种工作模式,手动控制、自动控制和遥控控制,这3种工作模式可以通过面板的控制开关进行转换。手动控制模式主要用于设备调试及异常状况下的应急使用,在此模式下每台风机都只能由面板上的对应风机开关控制,控制该风机的正传、反转、停止。
自动控制模式是根据温度信息控制2组风机的工作和停止,设置有2档温度阈值。当温度上升到第一档温度阈值时,启动一组风机工作,当温度上升到第二温度阈值时2组风机同时启动工作。为了设备的可靠性及寿命,当需要启动一组风机时,风机组的选择根据累计工作时间自动切换,能够使两组风机的累计工作时间基本一致,延长设备寿命。
遥控控制模式是根据接收到的控制指令对风机进行相应的控制,主要用于远程人工干预控制或远程二次开发控制。可以根据新的需求,开发新的控制逻辑。
3本地控制系统设计
本地控制系统的设计有电子学硬件设计、软件设计、结构设计。考虑到抗腐蚀性及电磁兼容性等要求,本地控制系统结构设计为一个密闭的不锈钢箱体,可以根据实际需求进行更改,在此处不多做赘述。
3.1硬件设计
电子学硬件设计主要有3部分,面板设计、控制电路板设计、电气电路设计。
面板主要具有状态选择功能、手动控制时手动控制开关、状态显示功能等。面板部分有一个三状态开关用于工作模式选择。有4个风机开关,每个开关用于对应风机的手动控制。一个电源指示灯,3个工作模式指示灯,4个工作状态指示灯和4个故障指示灯,及对应的标识等组成。
控制电路板采用DSP+FPGA架构,结合DSP的计算处理优势及FPGA可编程外设接口优势。因为系统高可靠性的需求,控制电路板除CPU和FPGA以外,都采用热备份。控制电路板根据所需具有的电源缺项检测功能、温湿度测量功能、对外通讯功能、接收面板状态信息功能、给面板发送控制信息功能、接收电气电路的信息和给电气电路发送控制命令功能等功能需求。控制电路板的结构框图如图3所示。
其中,缺项检测采用3个AC/DC模块LD12-20B12把三项四线电源转换成三路直流信号,通过检测这三路直流信号完成电源缺项检测功能。因为系统的数据计算量不大,DSP和FP⁃GA的选用没有特殊要求,本系统选用应用成熟的DSPVC33和EP1C12Q240I7,其他器件都为嵌入式电路常用器件,根据需求选取即可,在此不再赘述。
电气电路主要用于弱电与强电的转换,利用TTL电平控制380 V动力电,检测380 V输出电流,并具有过流保护功能。主要由接触器、电流互感器、空开组成。由接触器完成TTL电平控制380 V动力电,由电流互感器完成380 V输出电流检测并输出模拟信号,当输出电流过大,空开会自动断开实现过流保护。
3.2软件设计
本地控制系统的控制逻辑实现及数据处理计算等工作都是在DSP内部完成,所以软件设计主要介绍DSP软件程序设计,FPGA的程序设计主要是用于实现外设接口,在此不做介绍。
DSP软件根据功能可分为初始化模块、中断模块、工作状态识别模块、传感器模块、警报模块、通讯模块、控制模块7个功能模块。
(1)初始化模块用于对风机控制系统的变量、输出量、寄存器进行初始化,并将初始化信息传送至控制模块。初始化后能使系统中的相关变量处于固定的已知状态,避免因某个变量的不确定状态引起程序运行过程中BUG。
(2)中断模块利用定时中断循环执行控制系统的相关逻辑,除初始化外,所有的功能模块都在中断内执行。首先进行风机的电源的缺相信息判断,并将缺相信息传送至控制模块。
(3)工作状态识别模块用于识别工作模式,工作模式有手动控制模式,自动控制模式,遥控控制模式,并将风机控制系统的状态信息传送至控制模块。
(4)传感器模块用于采集风机工作的电流值、风机转速、风机的工作环境温度值和风机的工作温度值,并分别传送至控制模块。
(5)报警模块用于根据输出控制信号、传感器测量值等信息及它们之间的相互逻辑关系判断出当前系统运行状态,并输出状态信息给控制模块[10-13]。
(6)通讯模块用于把需要输出的信息按照通讯协议编译后输出,把接受的指令信息按照通讯协议释义出后发送给控制模块。
(7)控制模块用于实现初始化模块、中断模块、工作状态识别模块、传感器模块、通讯模块之间的数据交互,并根据温度值、电流值、通讯模块信息、状态信息产生相应的控制信号,控制信号控制至风机工作在相应的工作模式或向报警模块发送报警信号。
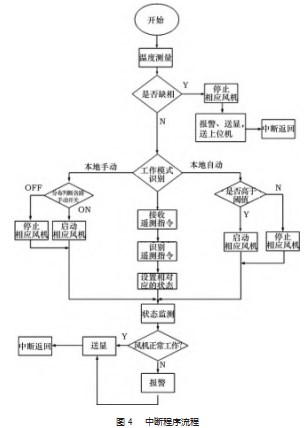
软件的程序流程如图4所示。根据自动化及可靠性的需求,当工作在遥控模式时,如果在一定的时间内没有接收到有效的控制指令时,系统会自动转入自动控制模式。因此即使通讯链路故障也不会影响系统的正常工作,相较于在工业计算机上开发的控制系统极大的提高了系统的可靠性。
4应用效果分析
将以上设计研究的智能风机控制系统应用到某通风场合,对其应用效果进行了详细分析。
智能风机控制系统中本地控制系统是自研开发的嵌入式控制系统,由于在一些环境条件下计算机是无法正常工作的,相较于计算机系统,本地控制系统可以应用的环境范围更广。同时本地控制系统可以采用不同等级的器件找到环境适应性与成本的平衡点,达到效益最大化。
智能风机控制系统可以实现高可靠性。因为计算机系统的操作系统运行长时间后,系统运行速度会变慢,并且出故障几率会增大。嵌入式系统的软件规模非常小,逻辑严密,运行功能性能不会随着时间改变,运行稳定可靠。智能风机控制系统样机交付客户后,至今已运行17个月,没有发生故障。
5结束语
本文针对远程、智能、高可靠性的风机控制需求,及其他功能性能需求,根据工程实际情况,提出本地控制系统与远程终端指令控制相结合的控制模式。
利用该控制模式研制本地控制系统一套。相较于现有嵌入式风机控制系统,本系统主要有以下3点区别:(1)本系统有3种控制模式,分别为手动控制模式、自动控制模式和遥控控制模式,调试方便、控制方式丰富;(2)本地控制系统的环境适应性及成本之间得平衡关系,可以通过选取不同等级的器件得到优化,提高产品性价比;(3)本地控制系统增加了风机的反转功能,在一些特殊的场合,该功能非常重要,拓展了系统的应用场景。
最后通过样机无故障运行17个月,验证了智能风机控制系统远程、智能、高可靠性。在接口可拓展性和带载能力的可拓展性及智能化方面可以继续开展这几方面的研究。
参考文献:
[1]李建红.煤矿压风机远程自动控制系统的研究与应用[J].自动化应用,2020(11):24-28.
[2]貟少强,孟卓,宝银昙.矿井通风机远程监控系统设计与应用研究[J].能源与环保,2021(9):16-21.
[3]邵林,白赟.双向行车特长隧道运营通风风机控制策略研究[J].山西建筑,2021(14):120-124.
[4]孙浩.煤矿矿井可视化通风系统的探索[J].科技创新与应用,2015(25):123.
[5]赵晋红.矿井通风机在线监测系统设计研究[J].能源与环保,2019,41(11):103-106.
[6]王杨峰.煤矿风机PLC自动控制系统设计[J].机电工程技术,2019(8):215-217.
[7]刘旭.基于PLC软冗余的矿井风机智能控制系统[J].煤炭技术,2018,37(1):248-250.
[8]雷声媛,邵瑞.基于嵌入式处理器的煤矿主扇风机控制系统设计[J].微型电脑应用,2020,36(10):52-55.
[9]孙洁.基于ARM处理器的矿井通风机在线监测与故障诊断系统[J].机械管理开发,2017,32(7):55-58.
[10]刘宁.煤矿通风监控系统智能修复技术研究[J].能源与环保,2020,42(11):138-141.
[11]李生虎,唐彩林,吴东,等.基于电压相位比较的双馈风电场输电线路单相接地距离保护[J].电力系统保护与控制,2018(23):1-7.
[12]毕天姝,刘素梅,薛安成,等.具有低电压穿越能力的双馈风电机组故障暂态特性分析[J].电力系统保护与控制,2013(2):26-31.
[13]王克群.大型军用仓库通风机集成智能控制系统设计研究[J].智能计算机与应用,2016(5):5-8.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/49078.html