SCI论文(www.lunwensci.com)
摘要:滚动轴承应用场景的工况较为严苛且其结构特殊,经常发生故障。常用振动信号检测方法来判断轴承现状,但已有方法无法直接提取轴承元件的振动信号,且存在信号干扰,安装也较为烦琐,不利于后续数据分析。为此提出了一种基于机器视觉的滚动轴承振动信号检测方法。利用高速相机获取了滚动轴承运行时的时间序列图像,通过图像处理获取了滚动轴承内圈特征坐标,建立了基于YOLOv3的滚动轴承深度学习识别模型,并对采集视频进行首帧预框选,提高了检测速度与准确性。最后搭建了滚动轴承振动检测试验台进行验证。测试结果表明,所提方法能够有效地检测滚动轴承内圈的振动信号,识别率达到99.4%以上,可根据信号峭度和轨迹分布有效区分滚动轴承故障。
关键词:机器视觉;滚动轴承;振动检测;YOLOv3
Machine Vision Based Vibration Detection Method for Rolling Bearing
Wang Yanzhong,Jia Yanrong※,E Shiyuan,Xie Bin,Gong Shenghan(School of Mechanical Engineering and Automation,Beihang University,Beijing 100191,China)
Abstract:With its harsh working conditions and special structures,the rolling bearings often fail.Vibration signal detection methods are commonly used to determine the current status of bearings,but existing methods cannot directly extract the vibration signals of bearing components,and there are signal interference and installation is cumbersome,which is not beneficial to subsequent data analysis.A vibration signal detection method for rolling bearings based on machine vision was proposed.A high-speed camera was used to obtain the time series image of the operating rolling bearing,and the characteristic coordinates of the inner ring of the rolling bearing were obtained through image processing.A rolling bearing depth learning recognition model based on YOLOv3 was established.The captured video was pre framed for the first frame,improving the detection speed and accuracy.Finally,a rolling bearing vibration detection test rig was built for verification.The results show that the proposed method can effectively detect the vibration signals of the inner ring of rolling bearing,with a recognition rate of over 99.4%.It can effectively distinguish rolling bearing faults based on signal kurtosis and trajectory distribution.
Key words:machine vision;rolling bearing;vibration detection;YOLOv3
0引言
滚动轴承凭借工作可靠、启动性能优异、维护方便以及承载能力优异等优点被广泛用于航空、航天、高铁和机床等各业[1],发挥着不可替代的作用。但是由于复杂工况以及轴承制造和装配误差,导致滚动轴承常出现不同程度和类型的故障[2]。统计数据表明,因滚动轴承引发的传动设备故障约占30%[3]。
振动信号是滚动轴承动态分析的重要特征指标,包含滚动轴承大量的运行状态信息,目前最常见的滚动轴承振动信号检测方法为加速传感器检测和声发射检测,但均无法直接提取滚动轴承各个元件的振动特征信号。加速传感器直接安装在滚动轴承座上,提取的是轴承座的振动信息,振动信号从滚动轴承传递时会出现衰减和噪声叠加;而声发射检测需要极为苛刻的无声环境,检测的信号叠加了设备其他干扰噪声,给后期的数据提取和分析增加了不少难度。两种方案均存在一定的缺陷。因此,为减少滚动轴承引发的传动设备故障,针对性地检测滚动轴承元件振动信号具有重要的工程意义。
机器视觉检测因其可靠性强、抗干扰能力强、安装简便、成本低、可针对性提取特征和识别准确率高,引起了国内外学者的关注[4-11]。徐秀秀等[12]在柔性臂上标记光源,通过Otsu阈值分割实现基于机器视觉的柔性臂振动在线测量。杨翀等[13]从理论和实验两方面对振动测量进行了研究,通过光学干涉计量来提高检测精度和准确性。Byeong Hwa Kim等[14]提出了一种从高速运动的电缆的运动图像中识别出目标的中心的算法,实现了机器视觉对电缆运动状态的监测。Sheraz Ali Khan和Jong-Myon Kim[15]通过对图像局部二值化的直方图处理,显现故障所带有的特殊纹理,实现机器视觉对转速的检测。伍济钢等[16]结合双目视觉与特征匹配跟踪,实现对薄壁件的振动位移测量,为进一步动态特性分析提供支持。
结合机器视觉的优势,本文将机器视觉用于检测滚动轴承的振动信号,采用高速相机采集正在运行的滚动轴承的时间序列图像,在HSV空间颜色模型基础上,通过图像处理和YOLOv3的特征识别结合识别提取滚动轴承中心振动位移,最后搭建滚动轴承振动检测台进行验证。
1滚动轴承图像采集
滚动轴承振动特征提取的图像采集系统的总体原理如图1所示。系统包含高速工业相机、高速相机采集卡、光源、后处理计算机、图像处理分析软件、滚动轴承、调速电机和联轴器等。搭建滚动轴承试验台,将各个传动装置安装固定在工作台上,通过聚光灯照射在滚动轴承端面,增加高速相机的采集亮度,同时调整滚动轴承与高速相机的距离,保证高速相机有效地采集目标轴承区域,通过采集卡将采集图像转化为数字图像信息,传输到计算机上,通过自主编制的图像处理软件进行处理。
结合滚动轴承振动试验台的检测要求,综合考虑相机的分辨率、颜色分辨力以及帧率、存储空间以及后续的图像可处理性等内容,本文采用IDT Y3系列130万像素高速摄像机,如图2所示。该摄像机在圈分辨率下最高可达每秒6 000帧,具有极低的噪声和极高的光灵敏度(6 000 ISO黑白/2 000 ISO彩色),提供RAW格式原始图像数据,支持多种图像格式转换,保障后续的图像处理和特征识别,特别适用于细节和速度双重要求的应用,常用于车辆和发动机产品测试等,高速摄像机的具体参数如表1所示。
根据相机与轴承的物距以及滚动轴承的实际大小,确定光学镜头的和选取合适的光学镜头,镜头采用Kowa公司的LM25HC型号,焦距为25 mm,光圈为F1.4~16,分辨率为1 280 Pixel×1 024 Pixel。本试验高速相机所测
对滚动轴承振动信号的提取过程,通过亚像素检测在增大其检测精度至0.1个像素,因此推导出其检测精度为0.008 mm,简化取0.01 mm,满足规定的0.1 mm的检测精度要求。
2图像处理滚动轴承特性检测
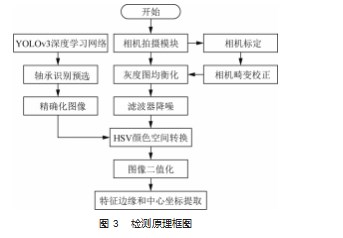
主要检测滚动轴承内圈中心随时间变化的坐标。首先采用亚像素角点细化相机标定精度,在此基础上,进行图像灰度均衡化、HSV颜色空间转换、图像二值化、边缘检测以及中心提取等,再通过YOLOv3滚动轴承预框选进一步提高特征识别的速度和精度。检测原理如图3所示。
2.1图像均衡化增强处理
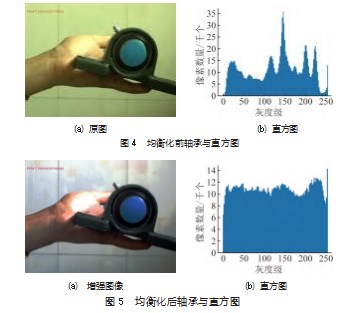
相机采集的图像会因光线、镜头等导致出现滚动轴承细节被隐藏[17]。均衡化前后轴承与直方图如图4~5所示。在均衡化之前,图像直方图高灰度的比例比较大,出现明暗对比强烈,如图4(b)所示;无关区域的高亮度区域明显,滚动轴承内圈轮廓信息却掩藏在较暗的区域中,如图4(a)所示。经过图像直方图均衡化,各个灰度等级的比例更加均衡,如图5(b)所示,滚动轴测内圈的边界轮廓也更加清晰,图像的灰度直方图的均衡化能够有效增强图像因光线等原因而被忽略细节特征,均衡化的图像的细节更加清晰,如图5(a)所示。
2.2 HSV颜色空间
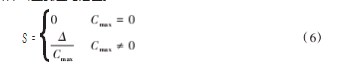
RGB颜色空间是日常生活中最常见的颜色空间,由红色(R),绿色(G)和蓝色(B)3个通道组成,利用RGB的线性组合来表示所有的颜色,RGB 3个分量均与图像的亮度有着密切的关系,三者均会随着亮度的变化而变化,在亮度相似情况下无法直观区分不同颜色,但相机拍摄的图像更容易受到光照的影响,即亮度敏感,因此,RGB颜色空间并不适合于图像处理。HSV模型由色调(H),饱和度(S),明度(V)组成,是根据颜色的直观特性创建的一种颜色空间,由光谱颜色、颜色饱和度、颜色的明暗程度构成,对图像的亮度信息更加敏感,并且对颜色的区分性更强,在此基础上,在滚动轴承内圈传动轴承端面均匀喷涂颜色标记,将RGB颜色模型转换为HSV模型,其转换关系如下:
HSV中的饱和度S表示该颜色与光谱色的相似度,取值范围通常为0%~100%,其值越大,表明颜色越饱和,越接近光谱色。
对于光源色,其明度值与图像的亮度有关,HSV中的V用于表示颜色的明亮程度,通常取值范围从0%(黑)到100%(白)。
V=Cmax (7)
观察图6~7可以发现,HSV颜色空间模型能够有效区分滚动轴承端面预设的颜色,并且能够有效去除RGB空间颜色模型中明暗带来的区别,更便于对颜色的区分和颜色特征的分割提取。
2.3图像二值化处理
通过对图像的二值化极大程度上减少图像处理数据量,去除图像中无用的信息,从而更加凸显出目标的轮廓,图像的二值图只包含黑白两种颜色。
式中:Psrc为像素值;Plow为下边界数值;Phigh为上边界数值。
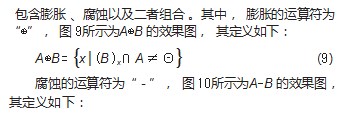
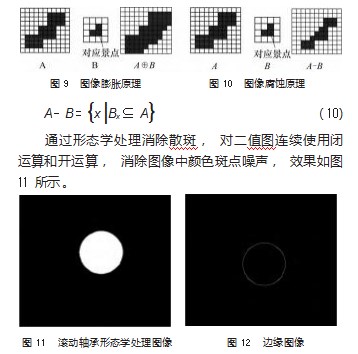
对滚动轴承的HSV颜色空间模型图像进行颜色阈值二值化处理,获取二值图,如图8所示。由于光线等原因,二值图会出现颜色散点,影响图片处理与轮廓识别。通过图像形态学处理以减少干扰因素的影响。形态学处理主要
2.4边缘检测与中心提取
通过以上图像增强、图像HSV颜色空间模型转换、图像二值化和相关形态学处理,有效抑制了图像边缘外的噪声,去除无关信息,防止将灰度变化较大的噪声信息识别为伪边缘,获得了目标物体图像更加精确的边缘位置。
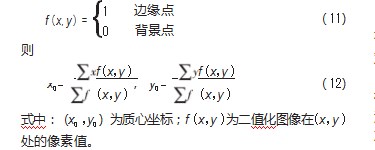
利用图像边缘区域灰度变化明显的特征,利用边缘一阶编导的差分计算特定区域的灰度梯度幅值和方向,计算图像范围内所有点的灰度梯度,而在图像边缘处灰度变化比较集中会出现大量的灰度变化,通过确定局部比较范围,仅保留该范围内灰度最大的点,可以有效剔除大部分无效的噪点,精确边缘,避免形成宽边带。边缘检测效果如图12所示。
在边界轮廓的基础上,进行滚动轴承内圈中心坐标提取,通过形心法对圆等中心对称的目标进行高精度定位,精度可达0.1个像素级别。
获得滚动轴承内圈中心检测结果如图13所示。
3基于YOLOv3的滚动轴承预识别
高速相机拍摄图像既要拍摄完整的滚动轴承,又要满足视野精度要求和相机标定要求,在滚动轴承图像中还包含大量背景区域。为了进一步提高滚动轴承图像处理的速度和特征识别的准确性,建立了基于YOLOv3的滚动轴承识别的深度学习网络,提高对滚动轴承特征识别的准确率。同时对滚动轴承的时间序列首帧图像进行预框选,缩减图像处理区域,减少运算量,提高滚动轴承振动信号检测的效率。
3.1搭建YOLOv3深度学习网络模型
建立了滚动轴承YOLOv3卷积神经网络的训练集,包含不同场景、光照、角度的滚动轴承图像,尽可能增加照片的种类,保证训练集的全面性。
对滚动轴承图像集进行训练集和验证集的划分,其比例为9∶1。开展了滚动轴承深度学习网络模型的训练。经过30轮的迭代训练,YOLOv3滚动轴承的识别模型的最终训练集损失值大致降低至42并稳定,验证集损失值大致降低至48并稳定。训练集与验证集的损失变化曲线如图14~15所示。
3.2 YOLOV3模型识别检测
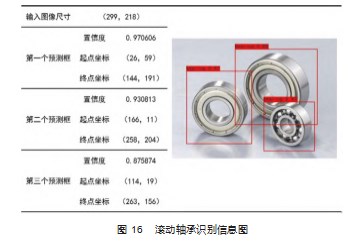
将训练好的YOLOv3滚动轴承模型的权重文件保存,存放到指定的目录文件夹中,运行编写好的测试代码,对训练模型进行检测,输出的结果如图16所示。
滚动轴承图像识别模型能够从图像中精确地框选出相应的滚动轴承,并在每个滚动轴承的预测框上标注了滚动轴承标签和置信度,定位检测效果良好。为了更加准确地确定滚动轴承网络模型的性能准确度,对100张含有滚动轴承的图像进行模型识别,并进行人工验证,确定能够准确识别出滚动轴承的图像数量。结果该模型的识别准确率达到95%,证明了本文卷积网络识别模型的优越性,满足检测需求。
3.3滚动轴承视频首帧预框选
将上述滚动轴承识别模型与图像处理结合,进一步提高滚动轴承内圈中心的检测速度与准确性。以800像素×600像素的滚动轴承视频为例,通过对滚动轴承视频的初始帧进行基于YOLOv3深度学习网络模型进行滚动轴承识别,获取滚动轴承预测框的起始点坐标(323,168)和终止点坐标(515,580),置信度为0.97,标签种类为bearing,裁剪后图像尺寸:192像素×412像素,如图17所示。依据预测框的起点和终点坐标系,对原始图像进行裁剪,仅对裁剪区域内的滚动轴承进行相应的图像处理。滚动轴承原图像的轴心提取的帧率FPS为167.14,裁剪后识别帧率FPS为248.77,相同情况下轴心识别帧率提高了48.8%。
滚动轴承振动位移基本控制在一个很小的范围,对预框选前后视频进行滚动轴承中心提取对比,视频共包含共计724帧图像,预框选前后识别坐标变化曲线如图18~19所示,曲线相似度达到100%,每一帧的图像中心位移结果均满足式(13)要求。
4试验与结果分析
为了验证基于机器视觉的滚动轴承振动检测方法的可靠性,本文建立了试验台,如图20所示。首先,安装滚动轴承试验台,检查完后通电试运行,检测试验台各个部位无异常,连接相关机器视觉检测设备,光源采用圆形聚光灯,将光源调节至合适的位置和角度,保证高速相机能够清晰准确地拍摄滚动轴承图像,降低后续图像处理和特征识别的难度。固定高速摄像机,使其光轴垂直于滚动轴承端面,并调节适当的拍摄位置,保证被测滚动轴承完全处于拍摄区域内,最后调节光圈焦距以及光源的强弱,保证采集的照片清晰。
设置高速相机的频率为1 000 fps,即采样频率为1 000 Hz,采样时间为5 s。设置完成后,运行滚动轴承试验台。为保证采集结果的准确和可靠性,待其进入稳定状态后,开始采集数据。通过计算机软件界面观察其运行状态,避免因光线等发生改变干扰采集数据。
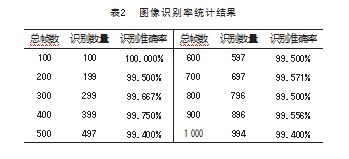
4.1识别效果检测
对高速相机拍摄的滚动轴承时间序列图像进行识别,以100张图像为1组递增,进行识别效果统计,计算该组别的识别准确率,识别结果如表2所示。由表可知,滚动轴承的振动特征识别优良,1 000帧数量下,识别准确率达到99.4%,满足识别检测要求。
4.2检测结果应用
为了进一步验证基于机器视觉的滚动轴承振动检测方法的可靠性,设置故障轴承对照组。拆分滚动轴承,对外圈滚道进行条形故障加工,如图21所示,预先制成试验所需要的故障滚动轴承。然后将预制的缺陷外圈分别与滚动轴承其他元件重新组装,并完成相应的密封和润滑处理,确保预制的局部故障轴承除了在外滚道的缺陷外,其他位置和情况和正常滚动轴承保持一致。
由表3可知,正常滚动轴承的峭度约为3,证明其振动信号呈现正态分布,运行正常,外圈故障轴承明显增大。
同时对滚动轴承内圈的轨迹展开分析。由于轴承配重负载,正常轴承的中心轨迹呈现出较为规律的椭圆形状。外圈存在故障的轴承的轨迹更加混乱,振动范围明显大于正常轴承轨迹。可见,本文基于机器视觉的滚动轴承振动信号检测方法能够从信号峭度和轨迹分布两个方面有效地区分轴承故障。
5结束语
本文提出了基于机器视觉的滚动轴承振动信号检测方法,有效提取滚动轴承内圈中心振动信号,识别率较高,维持在99.4%以上。利用高速相机获取运行中的滚动轴承时间序列图像,通过图像处理获取了滚动轴承内圈特征坐标。进行了基于YOLOv3的滚动轴承振动信号提取优化研究,建立了基于YOLOv3的滚动轴承深度学习识别模型,准确地从复杂的背景中提取滚动轴承,有效缩减图像处理计算量,提高滚动轴承的检测速度和检测精度,预框选前后坐标识别一致率达到100%。该方法能够有效对滚动轴承的故障类型进行区分,具有良好的工程应用价值。
参考文献:
[1]翁镇杰.高精度大型滑动轴承加工方法[J].机电工程技术,2021,50(S1):52-53.
[2]田富文.波纹度误差对滚动轴承振动特性的影响[J].装备制造技术,2022,331(7):87-89.
[3]李颖,吴仕虎,王鹏.基于MATLAB的滚动轴承寿命计算系统[J].机电工程技术,2022,51(11):38-42.
[4]WANG S G,GUAN B Q,WANG G B,et al.Measurement of sinu‐soidal vibration from motion blurred images[J].Pattern Recogni‐tion Letters,2006,28(9):1029-1040.
[5]季云峰.结构动位移测试的计算机视觉方法实现[J].同济大学学报(自然科学版),2013,41(11):1670-1674.
[6]高红俐,郑欢斌,姜伟,等.基于图像处理的疲劳裂纹扩展长度在线测量方法[J].中国机械工程,2016,27(7):917-924.
[7]RENATA K,EYAL M,EDUARD R,et al.Bearing diagnostics using image processing methods[J].Mechanical Systems and Sig‐nal Processing,2014,45(1):105-113.
[8]刘明周,蒋倩男,葛茂根.基于机器视觉的装配动作自动分割与识别[J].中国机械工程,2017,28(11):1346-1354.
[9]郭宁,赵晓莉,寇子明.基于机器视觉的提升系统钢丝绳横向振动监测研究[J].煤炭技术,2019,38(1):120-123.
[10]邱志成,汪先锋.基于双目视觉的振动测量及控制[J].振动测试与诊断,2018,38(1):51-58.
[11]黄南海,汪志成,周显恩.基于机器视觉的3C外壳工件螺孔位置尺寸测量系统[J].机电工程技术,2022,51(5):78-83.
[12]徐秀秀,郭毓,余臻,等.基于机器视觉的柔性臂振动测量研究[J].华中科技大学学报(自然科学版),2013,41(S1):129-132.
[13]杨翀.光学干涉计量用于振动测量的算法和实验研究[D].合肥:中国科学技术大学,2012.
[14]BYEONG H K.Extracting modal parameters of a cable on shaky motion pictures[J].Mechanical Systems and Signal Pro‐cessing,2014,49(1/2):3-12.
[15]KHAN S A,KIM J.Rotational speed invariant fault diagnosis in bearings using vibration signal imaging and local binary patterns[J].The Journal of The Acoustical Society of America,2016,139(4):100-104.
[16]伍济钢,邵俊,周根,等.基于双目视觉与特征匹配跟踪的薄壁件振动测量[J].激光与光电子学进展,2020,57(10):252-258.
[17]冯云,萧华鹏,马姝靓.高分辨率大视场DTI-CCD成像物镜的设计与实现[J].广西物理,2021,42(1):24-27.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61154.html